Procedimiento para evaluar la calidad de posición de una vía en función del efecto.
Procedimiento para determinar funciones de valoración específicas de un vehículo para evaluar lacalidad de posición de una vía en función del efecto,
siendo las desviaciones de la vía con respecto a suposición prefijada medidas como magnitudes de perturbación y valoradas en base a lascorrespondientes reacciones de vehículo calculadas, caracterizado porque las funciones de valoraciónespecíficas de un vehículo se determinan mediante cálculo de simulación sobre la base de un modelode vehículo y/o de resultados de ensayos de marcha y/o de banco de pruebas con un vehículo,
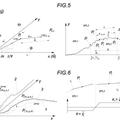
a) utilizándose K desviaciones de posición de vía, es decir, perturbaciones de prueba TSk≥1..K conforma, amplitud y longitud diferentes y con diferente superposición en dirección horizontal yvertical para cubrir el espectro de desviaciones reales de posición de vía, considerándose encada caso en una desviación de posición de vía TS≥(y, z, gh) separadamente para cada riel ladesviación horizontal y y la desviación vertical z con respecto a su posición prefijada, así comola desviación de la posición en altura gh recíproca de ambos rieles con respecto al peralteprefijado,
b) describiéndose para cada perturbación de prueba los parámetros característicos pm≥{ySt, yEw,zSt, zEw, ghSt, ghEw} por medio del respectivo incremento de las magnitudes y, z y gh, y pormedio del valor extremo de las magnitudes y, z y gh, por lo cual se determinan los parámetroscaracterísticos pm≥1..6, k≥1..K≥{ySt,k, yEw,k, zSt,k, zEw,k, ghSt,k, ghEw,k} asignados a las Kperturbaciones de prueba,
c) calculándose, para todas las perturbaciones de prueba y bajo variación de la velocidad demarcha v y la curvatura de vía kr, los valores extremos de las evoluciones temporales de Jreacciones de vehículo simuladas, respectivamente medidas,
d) y determinándose finalmente mediante análisis de regresión, para cada reacción de vehículoj≥1..J a evaluar, los coeficientes de regresión aj a ij por medio de equiparación de las funcionesde valoración específicas del vehículo
Rj ≥ aj + bj · ySt + cj · yEw + dj · zSt + ej · zEw + fj ·
ghSt + gj · ghEw + hj · v + ij · kr
a los valores extremos del paso c) introduciendo los parámetros característicos pm,k≥{ySt,k, yEw,k, zSt,k, zEw,k,ghSt,k, ghEw,k}, de la respectiva velocidad de marcha v y de la respectiva curvatura de vía kr.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08003150.
Solicitante: DB NETZ AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: THEODOR-HEUSS-ALLEE 7 60486 FRANKFURT AM MAIN ALEMANIA.
Inventor/es: NICKLISCH,DIRK, HAMBERGER,HERRMANN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B61K9/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61K EQUIPOS AUXILIARES ESPECIALMENTE ADAPTADOS PARA FERROCARRILES, NO PREVISTOS EN OTRO LUGAR (frenos acumuladores de la energía B61H; protección de la vía contra los agentes atmosféricos E01B; limpieza de raíles, quitanieves E01H). › B61K 9/00 Gálibos de perfiles de vehículos ferroviarios; Detección o indicación de calentamiento excesivo de órganos; Dispositivos sobre las locomotoras o los vagones que indican las secciones defectuosas de la vía; Características generales de vehículos de auscultación de la vía. › Instalaciones de medida para vigilar la vía (aplicación de aparatos o dispositivos de medida para trabajos de colocación de la vía E01B 35/00; técnicas de medida G01).
PDF original: ES-2412255_T3.pdf
Fragmento de la descripción:
Procedimiento para evaluar la calidad de posición de una vía en función del efecto [0001] La invención se refiere a un procedimiento para determinar funciones de valoración específicas de un vehículo para evaluar la calidad de posición de una vía en función del efecto, midiéndose las desviaciones de la vía con respecto a su posición prefijada como magnitudes de perturbación y valorándoselas en base a las correspondientes reacciones de vehículo calculadas.
Al sistema completo "vehículo-infraestructura" se le imponen ciertos requisitos en lo referente a seguridad, solicitación y confort de marcha. Para poder garantizar esos requisitos deben limitarse las reacciones del sistema (fuerzas de ruedas y aceleraciones de superestructura de vagón) , respectivamente los factores de influencia del sistema (perturbaciones) . Esto se logra en la producción mediante el diseño constructivo de los componentes del
vehículo y de la infraestructura. Dado que tanto los vehículos como la infraestructura están sometidos a desgaste, la garantía de los requisitos de sistema debe asegurarse adicionalmente por medio de correspondientes acciones de mantenimiento. En lo que respecta a la infraestructura debe mencionarse aquí sobre todo el mantenimiento de la posición de vía. Por medio de inspecciones regulares de la infraestructura deben detectarse defectos de posición de vía inadmisibles y a continuación se los debe reparar.
Para garantizar una operación ferroviaria rentable se tiene por objeto mantener el gasto para el mantenimiento de la posición de vía lo más reducido posible, sin que se ponga en riesgo la seguridad del sistema y se menoscabe el confort de marcha de manera inadmisible. Por ello se busca desde hace muchos años un procedimiento de inspección que cumpla con esos requisitos de la mejor manera.
Es conocido un procedimiento para el registro de datos de estado de infraestructuras, llevándose a cabo en el sistema móvil de registro de datos de estado la asignación de ubicación de los datos de estado sobre la infraestructura por el hecho de que primeramente se determina la posición geográfica mediante un sistema de determinación de posición por satélite, el inspeccionante realiza la asignación entre una coordenada del sistema de determinación de posición y la infraestructura por medio de especificación de al menos un punto de referencia fijo y la dirección de movimiento sobre la infraestructura, y la determinación de distancia a lo largo de la infraestructura se realiza por medio de retrocálculo de las coordenadas del sistema de determinación de posición a la infraestructura calculando el trayecto recorrido hacia el punto de referencia o alejándose de éste a una posición sobre la infraestructura (DE 101 25 515 A1) .
Aparte de ello se conoce un procedimiento para la simulación del estado de vías de transporte, en el que para un pronóstico del desarrollo de estado se registran datos de entrada en un paso y se los suministra a un procesamiento en un paso siguiente, empleándose una red neuronal a optimizar que, utilizando cualesquiera datos de entrada, lleva a cabo una división de la vía de transporte en porciones homogéneas que muestran un mismo estado o un mismo comportamiento en lo que respecta a uno o varios parámetros y realiza para aquellas una clasificación y/o un pronóstico del desarrollo del estado (EP 1 271 364 A2) .
Los procedimientos utilizados actualmente para la inspección de la geometría de vías tienen graves puntos débiles: 45
• La geometría de posición de vía se evalúa solamente en base a reglas establecidas en forma empírica, cuya relación con las reacciones de vehículo resultantes y, por consiguiente, su efecto sobre la seguridad y el confort de marcha frecuentemente están probados insuficientemente.
• Se evalúa siempre únicamente la amplitud de las desviaciones de posición de vía. La forma y la longitud
de los defectos de posición de vía no se tienen en cuenta en la evaluación, a pesar de que a igual amplitud influyen considerablemente en el efecto sobre el vehículo.
• Las reglas de evaluación empleadas hasta ahora no tienen en cuenta la aparición eventualmente simultánea de diferentes defectos de posición de vía (p. ej. superposición de defectos de nivelación longitudinal y de alineación) .
• Las reglas de evaluación empleadas hasta ahora no tienen en cuenta la influencia del trazado de vía, a pesar de que los mismos defectos de posición de vía repercuten diferentemente en la curva y en la vía recta.
La seguridad y la solicitación de sistema, así como el confort de marcha, no se influencian por el recorrido 60 geométrico propiamente dicho del defecto de posición de vía, sino por el efecto de aquel sobre el vehículo (fuerzas, aceleraciones) . En la evaluación de los defectos debe tenerse en cuenta, por lo tanto, sobre todo el efecto de ésos. En el pasado se estudiaron, por ello, diferentes posibilidades para evaluar la posición de vía en función del efecto, pero aquellas no condujeron al éxito deseado.
En la evaluación de reacciones de vehículo que se miden, las vías se transitan en intervalos regulares con un tren de medición. Al hacerlo se miden las fuerzas de rueda y las aceleraciones de superestructura (reacciones de vehículo) y a continuación se las evalúa.
Para las distintas magnitudes de reacción (fuerza horizontal de rueda, fuerza vertical de rueda, aceleración horizontal, aceleración vertical) se definen valores límite. En la evaluación se determinan los puntos en la vía, en los cuales la curva de una magnitud de medición de reacción excede el valor límite especificado, y se los emite como exceso.
Este proceso implica las siguientes desventajas:
• Los resultados de evaluación se refieren exclusivamente al vehículo de medición. No se obtiene ninguna información sobre qué resultados suministrarían otros tipos de vehículo.
• Los resultados de medición se influencian además por el estado de mantenimiento de los vehículos de
medición, por la geometría de contacto entre la rueda y el riel, por el recorrido del trazado y por la situación meteorológica. La evaluación no se refiere, por consiguiente, en forma unívoca a desviaciones de vía.
En la evaluación de reacciones de vehículo calculadas se describe la relación entre desviaciones de vía y reacciones de vehículo en base a modelos físicos. Para los parámetros de posición de vía medidos se calculan, sobre la base de los datos de modelo, las reacciones de vehículo mediante cálculos de simulación y ésas se evalúan como reacciones medidas (véase más arriba) .
El cálculo de simulación insume mucho tiempo debido a los modelos de vehículo complejos. El
procedimiento se utiliza, por ello, principalmente para estudios en el laboratorio. El cálculo de simulación no es utilizable para el empleo en la evaluación de la posición de vía debido a motivos de tiempo.
Del documento WO 2006/032307 se conoce un procedimiento para el diagnóstico y la monitorización de estado de un cambio de vía y/o de un cruzamiento y/o de un cambio de cruzamiento y/o de una junta de riel y/o de inhomogeneidades de vía de un recorrido de tráfico ferroviario, midiéndose y almacenándose, al transitar un vehículo ferroviario sobre el cambio de vía, cruzamiento, cambio de cruzamiento, la junta de riel o la inhomogeneidad de vía, aceleraciones de movimiento vibratorio en al menos una dirección espacial en al menos un componente del vehículo ferroviario, las cuales se producen en el componente del vehículo ferroviario por el tránsito del vehículo ferroviario sobre aquellos elementos,
- midiéndose, así como almacenándose, la velocidad del vehículo ferroviario y determinándose, así como almacenándose, la dirección de tránsito, -controlándose si se exceden valores límite característicos especificados de las aceleraciones de movimiento vibratorio medidas, y disponiéndose la realización de una medición ampliatoria subsiguiente de un estado de componentes del cambio de vía, cruzamiento, cambio de cruzamiento, de la junta de riel
o de la inhomogeneidad de vía en el caso de que se excedan los valores límite especificados de la aceleración de movimiento vibratorio.
Este procedimiento no está en condiciones de evaluar la posición de vía en forma indirecta en función del 45 efecto.
La invención se basa en el objetivo de desarrollar un procedimiento que evalúe la posición de vía en forma indirecta en función del efecto (en lo que respecta a los efectos concretos sobre la reacción de vehículo) y que cumpla con los requisitos impuestos a la inspección... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar funciones de valoración específicas de un vehículo para evaluar la calidad de posición de una vía en función del efecto, siendo las desviaciones de la vía con respecto a su posición prefijada medidas como magnitudes de perturbación y valoradas en base a las correspondientes reacciones de vehículo calculadas, caracterizado porque las funciones de valoración específicas de un vehículo se determinan mediante cálculo de simulación sobre la base de un modelo de vehículo y/o de resultados de ensayos de marcha y/o de banco de pruebas con un vehículo,
a) utilizándose K desviaciones de posición de vía, es decir, perturbaciones de prueba TSk=1..K con forma, amplitud y longitud diferentes y con diferente superposición en dirección horizontal y vertical para cubrir el espectro de desviaciones reales de posición de vía, considerándose en cada caso en una desviación de posición de vía TS= (y, z, gh) separadamente para cada riel la desviación horizontal y y la desviación vertical z con respecto a su posición prefijada, así como la desviación de la posición en altura gh recíproca de ambos rieles con respecto al peralte prefijado, b) describiéndose para cada perturbación de prueba los parámetros característicos pm={ySt, yEw, zSt, zEw, ghSt, ghEw} por medio del respectivo incremento de las magnitudes y, z y gh, y por medio del valor extremo de las magnitudes y, z y gh, por lo cual se determinan los parámetros característicos pm=1..6, k=1..K={ySt, k, yEw, k, zSt, k, zEw, k, ghSt, k, ghEw, k} asignados a las K perturbaciones de prueba, c) calculándose, para todas las perturbaciones de prueba y bajo variación de la velocidad de marcha v y la curvatura de vía kr, los valores extremos de las evoluciones temporales de J reacciones de vehículo simuladas, respectivamente medidas,
d) y determinándose finalmente mediante análisis de regresión, para cada reacción de vehículo j=1..J a evaluar, los coeficientes de regresión aj a ij por medio de equiparación de las funciones de valoración específicas del vehículo
Rj = aj + bj · ySt + cj · yEw + dj · zSt + ej · zEw + fj · ghSt + gj · ghEw + hj · v + ij · kr
a los valores extremos del paso c) introduciendo los parámetros característicos pm, k={ySt, k, yEw, k, zSt, k, zEw, k, ghSt, k, ghEw, k}, de la respectiva velocidad de marcha v y de la respectiva curvatura de vía kr.
2. Procedimiento para determinar funciones de valoración específicas de un vehículo para evaluar la calidad de posición de una vía en función del efecto, que –salvo la definición de las funciones de valoración– comprende las mismas características que la reivindicación 1, ponderándose en las funciones de valoración de la reivindicación 1, que son específicas del vehículo, las magnitudes ySt, yEw, zSt, zEw, ghSt, ghEw, adicionalmente con la velocidad de marcha v y teniéndose en cuenta en la valoración un componente v2 . kr adicional que es determinante para la reacción de vehículo cuasiestática, con lo cual las funciones de valoración adquieren la siguiente forma:
Rj = aj + (bj · ySt + cj · yEw + dj · zSt + ej · zEw + fj · ghSt + gj · ghEw) · v + hj · v2 · kr
+ ij · v + jj · kr.
3. Procedimiento según las reivindicaciones 1 o 2, caracterizado porque la calidad de posición de la vía se evalúa en base a las funciones de valoración para distintos vehículos en función del efecto, diferenciándose unos de otros los coeficientes de regresión de las funciones de valoración para los diferentes vehículos.
4. Procedimiento según una de las reivindicaciones precedentes para evaluar la calidad de posición de una vía en función del efecto utilizando las funciones de valoración específicas del vehículo, midiéndose
las desviaciones de la vía, con respecto a su posición prefijada, como curva de magnitud de perturbación S= (y, z, gh) y valorándoselas en base a las correspondientes reacciones de vehículo calculadas, caracterizado porque a) los parámetros característicos pm=1..6={ySt, yEw, zSt, zEw, ghSt, ghEw} se determinan del respectivo incremento de las magnitudes y, z, gh y del respectivo valor extremo de las magnitudes y, z, gh,
b) a continuación, esos parámetros característicos pm=1..6={ySt, yEw, zSt, zEw, ghSt, ghEw}, la velocidad de marcha v permitida localmente y la curvatura de vía kr existente localmente se introducen en las funciones de valoración Rj específicas del vehículo, por lo cual resultan los 65 valores extremos esperados de las reacciones de vehículo,
c) y porque ésos se comparan con valores permitidos de las reacciones de vehículo, representando el resultado de esa comparación la evaluación de la calidad de posición de una vía en función del efecto.
5. Procedimiento según la reivindicación 4, caracterizado porque la curva de magnitud de perturbación S= (y, z, gh) se subdivide en porciones Sn= (yn, zn, ghn) y para cada porción Sn se determina un juego de parámetros característicos pm, n.
6. Procedimiento según la reivindicación 5, caracterizado porque la subdivisión de la curva de magnitud de perturbación se realiza en porciones Sn= (yn, zn, ghn) en base a los pasajes por cero de una curva de magnitud de perturbación modificada, siendo la curva de magnitud de perturbación modificada el resultado de la curva de magnitud de perturbación menos su valor medio.
7. Procedimiento según la reivindicación 5, caracterizado porque la subdivisión de la curva de magnitud de perturbación se realiza en porciones Sn= (yn, zn, ghn) en base a los puntos de intersección de la curva de magnitud de perturbación con una línea de valor umbral paralela al eje de trayecto (abscisa) .
8. Procedimiento según una de las reivindicaciones 1 a 7, caracterizado porque las funciones de valoración Rj se tienen en cuenta para las siguientes reacciones de vehículo:
j=1: ΣY (Suma de las fuerzas de rueda horizontales) , j=2: Y/Q (Relación de la fuerza de rueda horizontal con respecto a la fuerza de rueda vertical) , j=3: Qmin (Fuerza mínima de contacto de rueda) , j=4: Qmax (Fuerza máxima de contacto de rueda) ,
j=5: yb (Aceleración horizontal de superestructura de vagón) , j=6: zb (Aceleración vertical de superestructura de vagón) .
Patentes similares o relacionadas:
Aparato autopropulsado para medir parámetros estructurales y/o geométricos de un conmutador y/o vía férrea, del 1 de Julio de 2020, de General Impianti S.r.l: Un aparato autopropulsado para medir parámetros estructurales y/o geométricos de un conmutador y/o vía férrea, comprendiendo el aparato un vagón motorizado […]
Imagen detallada de video de la geometría de vía, del 17 de Junio de 2020, de VolkerRail Nederland BV: Tren de medición con un sistema óptico que cuenta con medios para realizar un registro de imágenes con una cámara y una lámpara, por ejemplo, imágenes detalladas de […]
Procedimiento para determinar una posición de referencia de una vía, del 3 de Junio de 2020, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Procedimiento para determinar una posición de referencia de una vía definida por un punto fijo posicionado junto a una vía con la ayuda de un […]
Dispositivo y procedimiento para detectar el entorno de vehículo de un vehículo ferroviario y vehículo ferroviario, del 22 de Enero de 2020, de BOMBARDIER TRANSPORTATION GMBH: Dispositivo para detectar el entorno de vehículo de un vehículo ferroviario , en donde el dispositivo comprende al menos un primer equipo de detección de imágenes, en […]
Procedimiento y sistema de medición para la detección de un punto fijo junto a una vía, del 1 de Enero de 2020, de Plasser & Theurer Export von Bahnbaumaschinen GmbH: Procedimiento para la determinación de la posición real de una vía con respecto a un punto fijo posicionado en un entorno lateral de la vía por medio […]
 Procedimiento y dispositivo para medir y calcular una vía de ferrocarril, del 25 de Diciembre de 2019, de HP3 Real GmbH: Procedimiento para medir y calcular el asiento de una vía férrea mediante un carro medidor de la vía (A), que puede rodar sobre la vía, con por lo menos […]
Procedimiento y dispositivo para medir y calcular una vía de ferrocarril, del 25 de Diciembre de 2019, de HP3 Real GmbH: Procedimiento para medir y calcular el asiento de una vía férrea mediante un carro medidor de la vía (A), que puede rodar sobre la vía, con por lo menos […]
Dispositivo y procedimiento para determinar como mínimo una propiedad de una vía para un vehículo ferroviario, así como un vehículo ferroviario, del 27 de Noviembre de 2019, de BOMBARDIER TRANSPORTATION GMBH: Dispositivo para determinar como mínimo una propiedad de una vía para un vehículo ferroviario , en donde el dispositivo (1, 1a, 1b) comprende […]
 Método para determinar la temperatura neutra de piezas de trabajo alargadas, del 25 de Septiembre de 2019, de Goldschmidt Thermit GmbH: Método para calcular la temperatura neutra o el estado libre de tensión de un tramo de carril , en donde el tramo de carril está sometido a tensión longitudinal […]
Método para determinar la temperatura neutra de piezas de trabajo alargadas, del 25 de Septiembre de 2019, de Goldschmidt Thermit GmbH: Método para calcular la temperatura neutra o el estado libre de tensión de un tramo de carril , en donde el tramo de carril está sometido a tensión longitudinal […]