PROCEDIMIENTO PARA ESTIMAR LA POSICIÓN DE UN RECEPTOR MEDIANTE SATÉLITES GNSS.
Procedimiento para estimar la posición de un receptor mediante satélites GNSS.
Procedimiento multifrecuencia y multiconstelación para la determinación de la posición de un receptor mediante satélites GNSS, que gracias a las etapas de: obtención de la pseudodistancia, sesgo ionosférico y vector de ambigüedad, determinación de una matriz de covarianza para cada uno de los parámetros anteriores y estimación de la posición del receptor y el desfase de su reloj a partir de las pseudodistancias, su matriz de covarianza, y efemérides precisas de los satélites. El procedimiento permite así procesar datos triple frecuencia y combinar señales de diferentes sistemas de navegación.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230694.
Solicitante: UNIVERSIDAD COMPLUTENSE DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: DE LACY PEREZ DE LOS COBOS,Maria Clara, RODRIGUEZ CADEROT,Gracia, MORENO MONGE,Beatriz.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/33 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Funcionamiento multimodo en diferentes sistemas que transmiten mensajes con sello de tiempo, p. ej. GPS/GLONASS.
Fragmento de la descripción:
Procedimiento para estimar la posición de un receptor mediante satélites GNSS.
Campo de la invención La presente invención se encuadra dentro de la navegación y el posicionamiento basado en el uso de satélites GNSS (Global Navigation Satellite System) .
Antecedentes de la invención El PPP (precise point positioning o posicionamiento puntual preciso) es una técnica de posicionamiento que consiste en determinar la posición de un receptor de forma exacta y precisa a partir de observaciones de código y fase no diferenciadas y efemérides precisas. Éstas incluyen información relativa a las posiciones de los 15 satélites en un sistema de referencia terrestre global y correcciones a los osciladores de los satélites; además se usan parámetros de orientación terrestre de los que forman parte el movimiento del polo y la longitud del día. Si bien las técnicas GNSS en modo relativo proporcionan mejores precisiones y repetibilidad que las soluciones de posicionamiento absoluto, el PPP no requiere la existencia de redes ni la utilización de varios receptores simultáneamente, lo que reduce significativamente el coste y permite determinar la posición incluso en los 20 lugares más remotos. Además, el PPP proporciona exactitudes del orden de decímetros en modo cinemático y de centímetros en modo estático (Bisnath and Gao. Innovation: Precise Point Positioning. A powerful technique with a promising future. GPS World, April:43–50, 2009) . Se llegan a valores del orden de milímetros tras 24 horas de observación (J. Geng, F. N. Teferle, C. Shi, X. Meng, A. H. Dodson, and J. Liu. Ambiguity resolution in precise point positioning with hourly data. GPS Solutions, 13 (4) : 263–270, 2009) . El principal inconveniente de la técnica 25 de PPP es que requiere de un periodo de inicialización de aproximadamente 30 minutos hasta que se obtienen resultados aceptables. El método clásico de PPP emplea una combinación de las observaciones de código y fase que prácticamente elimina el efecto de la ionosfera. Es una combinación lineal entre las portadoras L1 y L2 conocida como combinación libre del efecto ionosférico. El uso de esta combinación lineal, por el momento, limita el posicionamiento a observaciones doble frecuencia y aumenta el ruido de las observaciones en tres veces su ruido inicial.
Por el momento, las únicas aplicaciones informáticas de libre disposición para el procesado PPP están preparadas para trabajar únicamente con observaciones doble frecuencia de los sistemas GPS y GLONASS. Sin embargo, en un futuro cercano el escenario GNSS se ampliará a nuevos sistemas: GPS modernizado, Galileo, 35 GLONASS modernizado y COMPASS. El sistema GPS modernizado se espera que esté totalmente operacional a partir del año 2018. Galileo será el primer sistema de posicionamiento global diseñado, fundamentalmente, para uso civil, que se prevé totalmente operativo a partir del año 2014. Estos sistemas serán independientes y al mismo tiempo compatibles entre sí, permitiendo la combinación de observaciones de ambos sistemas por un mismo receptor. Otra característica importante es que estos sistemas transmitirán señales civiles en, al menos,
tres frecuencias distintas, lo que aumentará considerablemente la redundancia de observaciones. En la Tabla 1 se muestran las frecuencias básicas de los sistemas de navegación que coexistirán en los próximos años.
Sistema Portadora Frecuencia (MHz) Sistema Portadora Frecuencia (MHz)
GPS L1 1575.42 GLONASS G1 1602.00
L2 1227.6 G2 1246.00
L5 1176.45 G3 1204.704
Galileo E2-L1-E1 1575.42 COMPASS B1 1575.42
E5b E5a E6 1207.14 1176.45 1278.75 B2 B3 1191.75 1268.52
Tabla 1. Frecuencias básicas de los sistemas GPS modernizado, Galileo, GLONASS y COMPASS.
Actualmente, el sistema GPS dispone de dos satélites modernizados transmitiendo las tres señales civiles en las frecuencias L1-L2-L5 y el sistema Galileo cuenta con dos satélites experimentales, GIOVE-A y GIOVE-B, transmitiendo en las bandas E1-E5 o E1-E6 y en los próximos meses se dispondrá de los cuatro primeros satélites Galileo en el espacio, que emplearán señales en E1-E5-E6. Por su parte, el sistema GLONASS
modernizado está a punto de completar su constelación, la cual transmite dos frecuencias, aunque en un futuro tiene previsto incluir una tercera frecuencia civil. En cuanto a la detección de perturbaciones ionosféricas, es importante recordar que los satélites GNSS se encuentran a altitudes próximas a los 20000 km sobre la superficie terrestre y, por tanto, la señal GNSS está fuertemente afectada por la ionosfera que, a su vez, está muy ligada a la actividad solar. Por tanto, la señal GNSS puede verse gravemente afectada por la existencia de 55 perturbaciones en la distribución de plasma ionosférico, que son frecuentes e intensas en las proximidades del ecuador magnético terrestre, en una región comprendida entre ±20º de latitud, aunque también se ha registrado centelleo fuerte en la latitud de las Islas Canarias y no se descartan otras regiones. Las perturbaciones del plasma ionosférico pueden producir fuertes variaciones en la amplitud y la fase de la señal GNSS, dando lugar a un centelleo de la señal, pérdida de la señal por parte del receptor, saltos de ciclo, etc. y todo ello puede degradar el posicionamiento con errores de hasta varios metros
Objeto de la invención Los métodos de PPP existentes actualmente trabajan con observaciones relativas a una o dos frecuencias. El procedimiento de la invención está preparado para trabajar con tres frecuencias correspondientes a una o más constelaciones de satélites GNSS. Funciona por tanto en un contexto multifrecuencia y multiconstelación resolviendo los inconvenientes relacionados con la mezcla de diferentes frecuencias y diferentes constelaciones. Dentro de este contexto, la invención tiene por objeto la determinación de la posición del receptor explotando las ventajas de utilizar más frecuencias y más satélites y la detección de perturbaciones ionosféricas que pudieran degradar fuertemente la precisión de la posición estimada. Para ello se propone un procedimiento que es capaz de emplear todas las señales disponibles, permitiendo combinar observaciones de distintos sistemas de 15 navegación y dando lugar a estimaciones con distinta precisión y exactitud dependiendo de la duración de la sesión de observación, por lo que es de interés en aplicaciones geodésicas y geofísicas de precisión. Además, la estimación del retraso ionosférico proporciona información acerca de la calidad de la señal y permite detectar perturbaciones en la distribución de plasma ionosférico y, por tanto, el procedimiento de la invención puede ser empleado en aplicaciones geodésicas y de topografía en bajas latitudes. Para ello, la invención propone un procedimiento multifrecuencia y multiconstelación para la determinación de la posición de un receptor mediante satélites GNSS que comprende las etapas de obtención de la pseudodistancia, sesgo ionosférico y vector de ambigüedad entre un único receptor y un único satélite, modelando los sesgos de frecuencia y de cada sistema de satélites, determinación de una matriz de covarianza para cada uno de los parámetros anteriores, repetición de los pasos anteriores para una pluralidad de satélites y estimación de la posición del receptor y el desfase de su reloj a partir de las pseudodistancias calculadas anteriormente, su matriz de covarianza, y efemérides precisas de los satélites.
La pseudodistancia, sesgo ionosférico y ambigüedad de fase se pueden calcular a partir de observaciones de código y fase modelando los sesgos de frecuencia y sistema, la posición del receptor y el desfase de su reloj a partir de la distancia geométrica entre receptor y satélite, los desfases de los osciladores de los satélites y el efecto troposférico.
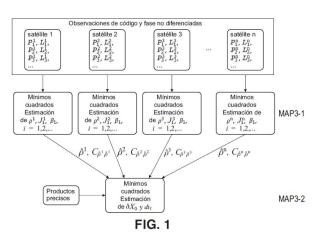
Breve descripción de las figuras Con objeto de ayudar a una mejor comprensión de las características de la invención de acuerdo con un ejemplo preferente de realización práctica de la misma, se acompaña la siguiente descripción de un esquema en donde con carácter ilustrativo se ha representado el procedimiento de la invención.
Descripción detallada de la invención El procedimiento de la invención permite procesar datos triple frecuencia incluyendo en las ecuaciones de observación los correspondientes sesgos de frecuencia y de sistema que son estimados por organismos científicos y son conocidos por el experto en la materia. En particular, se procesan observaciones GNSS de código y fase a triple frecuencia, utilizando una aproximación mínimo cuadrática en un contexto de 45 Posicionamiento Preciso Puntual (PPP) . El procedimiento consta de dos fases. En una primera...
Reivindicaciones:
1. Procedimiento multifrecuencia y multiconstelación para la determinación de la posición de un receptor mediante satélites GNSS que comprende las etapas de:
a. obtención de la pseudodistancia, sesgo ionosférico y vector de ambigüedad entre un único receptor y un único satélite por el método de mínimos cuadrados, modelando los sesgos de frecuencia y de cada sistema de satélites b. determinación de una matriz de covarianza para cada uno de los parámetros anteriores,
c.repetición de los pasos a y b para una pluralidad de satélites,
d. estimación por el método de mínimos cuadrados de la posición del receptor y el desfase de su reloj a partir de las pseudodistancias calculadas anteriormente, su matriz de covarianza, y efemérides precisas de los satélites.
2. Procedimiento según la reivindicación 1 caracterizado porque la pseudodistancia se calcula a partir de observaciones de código y fase modelando los sesgos de frecuencia y sistema.
1.
3. Procedimiento según cualquiera de las reivindicaciones 1 o 2 caracterizado porque el sesgo ionosférico se calcula a partir de observaciones de código y fase modelando los sesgos de frecuencia y sistema.
4. Procedimiento según la reivindicación 1 o 2 caracterizado porque la ambigüedad de fase se calcula a partir de 20 observaciones de código y fase modelando los sesgos de frecuencia y sistema.
5. Procedimiento según cualquiera de las reivindicaciones anteriores caracterizado porque la posición del receptor y el desfase de su reloj se calculan a partir de la distancia geométrica entre receptor y satélite, los desfases de los osciladores de los satélites y el efecto troposférico obtenido mediante modelos de Hopfield o Saastamoinen junto con la función de proyección de Niell”.
Observaciones de código y fase no diferenciadas
...
MAP3-1
^ 1 ^ 2 ^ 3
nn
^^^^ ^^ ^^
r, C 11 r, C 22 r, C 33 r, C
rrrr rr rr
MAP3-2
FIG. 1
Patentes similares o relacionadas:
Módulo receptor de GNSS de alta precisión para dispositivo móvil modular, del 3 de Julio de 2019, de Deimos Engenharia S.a: Un Módulo Receptor de GNSS de Alta Precisión y Flexible que comprende una pluralidad de Canales Receptores de GNSS Flexibles, uno para cada señal del satélite, […]
Extremo frontal GNSS RF reconfigurable y método para reconfigurar un extremo frontal GNSS RF, del 3 de Julio de 2019, de GMV AEROSPACE AND DEFENCE, S.A.U: Un extremo frontal RF para sistemas de navegación global por satélite que comprende: una pluralidad M de cadenas RF , M siendo un número natural […]
Receptor de navegación, del 17 de Enero de 2018, de QUALCOMM INCORPORATED: Una estación móvil que comprende: un primer receptor adaptado para recibir información por enlaces inalámbricos terrestres, estando […]
Un método de reducción del impacto de los saltos de frecuencia de vehículos espaciales sobre un dispositivo de navegación global, del 26 de Febrero de 2014, de ASTRIUM GMBH: Un método de reducción del impacto de saltos de frecuencia de reloj de vehículos espaciales sobre un dispositivo para detección de posición en un sistema de navegación […]
Dispositivo de radio múltiple que tiene un modo adaptable de radio navegación, del 20 de Mayo de 2013, de QUALCOMM INCORPORATED: Un procedimiento que comprende: proporcionar un dispositivo de comunicaciones que tiene al menos una interfaz del sistema inalámbrico […]
PROCEDIMIENTOS Y APARATOS PARA SISTEMAS DE NAVEGACIÓN ASISTIDA, del 12 de Septiembre de 2011, de NOKIA CORPORATION: Un aparato (R) que comprende - un elemento examinador (R.1.1) adaptado para examinar los datos de asistencia recibidos de un modelo de navegación generalizado incluyendo […]