Procedimiento para la estimación automática de los componentes de la producción de un racimo de vid mediante visión artificial.
Procedimiento para la estimación automática de los componentes de la producción de un racimo de vid mediante visión artificial (1),
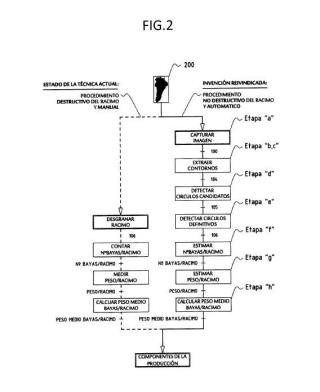
que comprende las etapas siguientes:
a) Capturar una imagen RGB original (100) de un racimo de vid (200) con una cámara (301) en una campana de adquisición (300);
b - e) Procesar una imagen RGB original (100) para obtener una imagen con círculos definitivos (106) superpuesta a la imagen RGB original (100);
f) Realizar un modelo numérico del número de bayas (201) por racimo (200) en función del número de círculos definitivos de la imagen para estimar el número de bayas (201) por racimo (200);
g) Realizar un modelo numérico del peso del racimo (200) en función del número de círculos definitivos de la imagen para estimar el peso del racimo (200);
h) Calcular el peso medio de las bayas (201) del racimo (200).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201400557.
Solicitante: UNIVERSITAT POLITECNICA DE VALENCIA.
Nacionalidad solicitante: España.
Inventor/es: CUBERO GARCIA,SERGIO, AQUINO MARTÍN,ARTURO, MILLÁN PRIOR,Borja, DIAGO SANTAMARÍA,María Paz, TARDÁGUILA LASO,Manuel Javier, ALEIXOS BORRÁS,María Nuria.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01B79/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01B TRABAJO DE LA TIERRA EN AGRICULTURA O EN SILVICULTURA; PARTES CONSTITUTIVAS O ACCESORIOS DE MAQUINAS O INSTRUMENTOS AGRICOLAS, EN GENERAL (apertura o recubrimiento de surcos o de hoyos para la siembra, plantación o abonado A01C 5/00; máquinas para la recogida de raíces o tubérculos A01D; segadoras convertibles en aparatos para trabajo de la tierra o capaces de trabajar la tierra A01D 42/04; segadoras combinadas con instrumentos para trabajo de la tierra A01D 43/12; trabajo de la tierra para obras públicas o explotaciones mineras E01, E02, E21). › Métodos para trabajar la tierra (requiriendo esencialmente el empleo de máquinas particulares, ver los grupos relativos a estas máquinas).
- A01D91/00 A01 […] › A01D RECOLECCION; SIEGA. › Métodos para la recolección de productos agrícolas (necesitando esencialmente el empleo de máquinas especiales, ver los grupos relativos a estas máquinas).
- A01D91/04 A01D […] › A01D 91/00 Métodos para la recolección de productos agrícolas (necesitando esencialmente el empleo de máquinas especiales, ver los grupos relativos a estas máquinas). › de productos que crecen sobre la superficie (frutos, lúpulo A01D 46/00).
- G06T7/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
Fragmento de la descripción:
Procedimiento para la estimación automática de los componentes de la producción de un racimo de vid mediante visión artificial.
Objeto de la invención
La presente invención se refiere a un procedimiento que permite estimar de forma automática, y sin destrucción de los racimos, los componentes de la producción de un 10 racimo de vid mediante visión artificial.
La presente invención resulta de gran interés para el sector vitivinícola en general, y especialmente para la estimación de producción de cantidad y calidad de uva.
Generalidades y estado de la técnica anterior más próximo
El número de bayas (granos de uva), peso del racimo, y peso medio de las bayas, llamados componentes de la'producción, son parámetros clave para la estimación del rendimiento del viñedo. Estos parámetros tienen un impacto no sólo en el rendimiento 2 0 del viñedo, sino también en la arquitectura del racimo y de su compacidad. Así los racimos compactos son más susceptibles a las enfermedades fúngicas, especialmente a Botrytis y a Oidio. Por otra parte, los componentes del rendimiento influyen en la calidad de la uva y del vino. La pérdida de la calidad de la uva está causada tanto por la incidencia de patógenos, como por la maduración heterogénea de las bayas que tiene
2 5 lugar en racimos compactos. A nivel enológico se prefieren racimos pequeños, con pocas
bayas y pequeñas.
La capacidad de predecir el rendimiento del viñedo se ha identificado en los últimos años como uno de los temas más rentables para el sector vitivinícola. La estimación del
3 0 rendimiento es un factor crítico para optimizar el manejo del viñedo y equilibrar entre
crecimiento vegetativo y productivo. Hasta ahora se han utilizado varios métodos para la estimación del rendimiento de uva del viñedo, pero en general son destructivos, poco robustos y subjetivos. Típicamente, las predicciones de rendimiento se llevan a cabo utilizando el conocimiento de los rendimientos históricos de la viña, junto con las 35 mediciones realizadas manualmente en el campo. Estas mediciones de campo en general, consisten en el conteo de racimos por cepa y el peso la uva en unas pocas cepas del viñedo. Según Blom y Tarara (2009) [1] la precisión en la estimación del rendimiento de uva puede variar hasta un 20 % o más en algunos casos. Ferrer et al., (2004) [2] intentaron estimar el rendimiento en varios viñedos en Uruguay sobre la base de la
4 0 disección de yemas, pero su precisión fue muy escasa. Todos estos métodos actuales son
destructivos, y requieren mucho tiempo y trabajo. Además, en general no realizan un número representativo y suficiente de medidas para poder obtener una estimación el rendimiento de forma precisa y robusta.
El procedimiento tradicional de estimación de los componentes de la producción de uva del viñedo se realiza mediante el pesaje de los racimos y el conteo de bayas en laboratorio. Esto requiere que los racimos han de ser desgranados manualmente para después, pesar las bayas o colocarlas en una bandeja y ser fotografiadas en condiciones 5 controladas de luz para el posterior procesamiento de la imagen. Por lo tanto, este método es manual v destructivo, requiriendo el desgranado del racimo a muestrear. Además, por su laboriosidad, estos métodos manuales requieren una elevada mano de obra y tiempo de ejecución, por lo que los muéstreos suelen ser pequeños, insuficientes y generalmente no representativos.
Otros sistemas permiten la estimación en campo del número de bayas mediante análisis de imagen, pero requieren la toma de imágenes por la noche (oscuridad total), para evitar la influencia de la luz solar; además no estiman el peso del racimo ni el peso medio de las bayas.
El análisis de imagen se utiliza ampliamente en la industria agroalimentaria para la clasificación de la fruta. Esta tecnología permite la creación de sistemas capaces de estimar o predecir algunas de las características de los objetos inspeccionados sin la necesidad de contacto, de una manera rápida, fiable y precisa. Recientemente, Herzog 20 et al. (2014) [3] han mostrado resultados muy interesantes sobre el uso de análisis de imágenes para el fenotipado de la vid. La visión por computador se ha utilizado en viticultura para evaluar el estado vegetativo y productivo del viñedo. Recientemente, (Diago et al., 2014) [4] desarrollaron un nuevo algoritmo para evaluar el número de flores por inflorescencia utilizando análisis de imagen en condiciones de campo. 25 Wycislo et al. (2008) [5] han utilizado diferentes parámetros o ratios para estimar la forma de las bayas en uva de mesa tales como la relación eje mayor/eje menor, forma y el valor de la compacidad. Recientemente, se ha desarrollado un nuevo método para la detección del pedúnculo del racimo de uva utilizando el análisis de imagen (Cubero et al., 2014) [6].
Para llevar a cabo la detección de las bayas en un racimo, se deben realizar los dos siguientes pasos: La extracción de los contornos, y la detección de los círculos en la imagen, ya que ésta es la supuesta forma de una baya. Varios métodos de extracción de contorno se han desarrollado pero el más ampliamente utilizado son los basados en 35 operadores Sobel y Canny. Ambos se basan en el gradiente de la intensidad en las imágenes; Canny es más avanzado, ya que incluye el operador de Sobel como un paso intermedio. La detección de círculos en las imágenes es otro problema clave que los investigadores han intentado resolver a partir de un número de diferentes enfoques. La transformada de Hough es probablemente el más ampliamente extendido, pero con un 4 0 muy alto coste de cálculo. Grossetéte et al. (2012) [7] utilizaron el reflejo de la luz del flash de una cámara digital para contar el número de bayas por racimo verde. Este enfoque no se puede aplicar después del envero (inicio de maduración de la uva) porque la pruína afecta a la reflexión de la luz. No existen métodos disponibles sobre la evaluación del peso de la baya o del peso del racimo de uva utilizando el análisis de 45 imagen.
La ventaja técnica de la presente invención es la de un procedimiento no destructivo. que permite determinar o estimar de forma automática, los componentes de la producción de un racimo mediante visión artificial: número de bayas, peso del racimo, y peso medio de las bayas.
Referencias bibliográficas
[1] Blom PE and Tarara JM, Trellis tensión monitoring improves yield estimation in vineyards. HortScience 44:678-685 (2009).
[2] Ferrer M, Abella J, Sibille I, Camussi G and González-Neves G, Determination of bud fertility as a simple method for the determination of harvesting volume in Vitis vinifera L. CV tannat, using two pruning systems. J Int Sci Vigne Vin 38:49-53 (2004).
[3] Herzog K, Roscher R, Wieland M, Kicherer A, Labe T, Forstner W, Kuhlmann H and Tópfer R, Initial steps for high-throughput phenotyping in vineyards. Vitis 53:1-8 (2014).
[4] Diago MP, Sanz-Garcia A, Millan B, Blasco J and Tardaguila J, Assessment of 2 0 flower number per inflorescence in grapevine by image analysis under field conditions.
J Sci Food Agrie DOI: 10.1002/jsfa.6512 (2014).
[5] Wycislo AP, Clark JR and Karcher DE, Fruit shape analysis of vitis using digital photography. HortScience 43:677-680 (2008).
[6] Cubero S, Diago MP, Blasco J, Tardaguila J, Millán B and Aleixos N, A new method for pedicel/peduncle detection and size assessment of grapevine berries and other fruits by image analysis. Biosyst Eng 117:62-72 (2014).
[7J Grossetéte M, Berthoumieu Y, Da Costa JP, Germain C, Lavialle O and Grenier G, Early estimation of vineyard yield: site specifíc counting of berries by using a smartphone. CIGR-AgEng2012 (2012).
Descripción detallada de la invención
El procedimiento para la estimación automática de los componentes de la producción de un racimo de vid mediante visión artificial de acuerdo a la presente invención comprende las etapas o pasos siguientes:
Etapa "a". Capturar una imagen RGB original 11001 de un racimo 12001 con una cámara (301) en una campana de adquisición (300).
Se captura una pluralidad de imágenes, siendo tres, tomadas a 120°, el mínimo número que garantiza el barrido de toda la envolvente convexa de un racimo (200) en tres 4 5 dimensiones a distancia finita.
Un modelo y distancia focal preferente de la cámara (301) es la siguiente: una cámara Canon EOS 550D con objetivo Canon EFS 18-55 (Canon Inc., Japan) con la distancia focal ñjada a 55 mm.
Una configuración preferente de los parámetros de captura de la cámara (301) es: velocidad de obturación 200 ms, sensibilidad ISO 800, enfoque manual y balance de blancos `Shadow,...
Reivindicaciones:
1. Procedimiento para la estimación automática de los componentes de la producción de un racimo de vid mediante visión artificial (1), caracterizado porque comprende las etapas siguientes:
a) Capturar una imagen RGB original (100) de un racimo de vid (200) con una cámara (301) en una campana de adquisición (300);
b) Segmentar la imagen RGB original (100) para obtener una imagen binaria con racimo segmentado (102) con los píxeles que conforman el racimo (200) y con los que corresponden al fondo (101);
c) Detectar en la imagen binaria con racimo segmentado (102) los bordes mediante el método de Canny, para los canales rojo y verde, de forma paralela para posteriormente adicionar los resultados para obtener una imagen binaria de bordes (104);
d) Detectar en la imagen binaria de bordes (104) los patrones circulares para obtener una lista de círculos candidatos a representar bayas en la imagen para obtener una imagen binaria con centros de círculos candidatos (105);
e) Filtrar en la imagen binaria con centros de círculos candidatos (105) las bayas (201) candidatas para obtener una imagen con círculos definitivos (106) superpuesta a la imagen RGB original (100);
f) Realizar un modelo numérico del número de bayas (201) por racimo (200) en función del número de círculos definitivos de la imagen para estimar el número de bayas (201) por racimo (200);
g) Realizar un modelo numérico del peso del racimo (200) en función del número de círculos definitivos de la imagen para estimar el peso del racimo (200);
h) Calcular el peso medio de las bayas (201) del racimo (200).
2. Procedimiento según la reivindicación 1, caracterizado porque el racimo (200) es de una vid, tanto de variedades tintas como blancas.
3. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque la captura de la imagen RGB original (100) del racimo (200) se realiza en una campana de adquisición (300) en condiciones de laboratorio con iluminación controlada.
La imagen binaria de bordes (104), resultado de este procedimiento, es un mapa binario de patrones en los que una cantidad limitada representan el contorno de las bayas.
Etapa "d". Detectar en la imagen binaria de bordes (104) los patrones circulares 5 para obtener una lista de círculos candidatos a representar bayas en la imagen para obtener una imagen binaria con centros de círculos candidatos (1051.
Una cantidad limitada de estos patrones se corresponderán con contornos de baya presentes en la imagen y otros no; en el paso siguiente se realizará el filtrado de los 10 perfiles erróneos.
Para realizar la detección de los patrones circulares se utiliza preferentemente la Transformada Circular de Hough (también es aplicable por ejemplo la Transformada de Simetría Radial). La transformada de Hough permite encontrar patrones geométricos en 15 dominios discretos como lo son las imágenes digitales. La Transformada Circular de Hough es la implementación concreta de dicha transformada para encontrar círculos. La implementación de la transformada utilizada requiere el establecimiento del valor de dos parámetros:
- Radio (R): radio de los círculos a buscar en la imagen.
Coincidencia en perímetro (CP): se trata de un valor normalizado al intervalo [0, 1] que se calcula de la siguiente manera:
CP = |N|/2*pi*R 25
donde |N| es el número de píxeles pertenecientes al perímetro del círculo de radio R en evaluación, que coinciden espacialmente con píxeles en la imagen bajo análisis.
Para facilitar el posterior filtrado de los candidatos a baya erróneos, se realiza la detección y almacenamiento de los mismos en una lista de la siguiente manera:
- La detección de los candidatos se realiza partiendo desde CP = 1 hasta CP = 0.4 (decrementos de 0.1). Los candidatos con valores de CP menores no son 35 calculados porque no ofrecen la más mínima garantía de representar a un
contorno de baya.
Para cada valor de CP, se buscan los candidatos con radio desde R = 15 (mm) hasta 3 (mm). Los candidatos con valores de R fuera de este rango no son 4 0 calculados ya que no tienen un tamaño representativo de ser baya.
De esta manera, se ha obtenido una lista de círculos en la que éstos están ordenados por orden decreciente de valor de CP y, para valores iguales de CP, por orden decreciente de radio.
4. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado porque el color del fondo (101) para la captura de una imagen RGB original (100), para el caso de:
- uva tinta es naranja con las siguientes componentes RGB:
R: 255;
G: 175±15;
B: 85±15.
- uva blanca es cian con las siguientes componentes RGB:
R: 95±15;
G: 130±15;
B: 180±15.
Patentes similares o relacionadas:
Aparato para aplicación de líquido agrícola, del 1 de Julio de 2020, de Precision Planting LLC: Un aparato de aplicación de líquido para aplicar líquido a tierra durante una operación de plantación, comprendiendo: un afirmador de semillas montado en […]
Sistema para el tratamiento de suelos, del 28 de Noviembre de 2019, de INCHUSTA CASCAJERO, Andrés: Sistema para el tratamiento de suelos que consiste en la introducción forzada de aire a través de los mismos, proporcionando a las raíces el oxígeno necesario. […]
Sistema y procedimiento para controlar maquinaria para aleatorizar y replicar niveles de insumos agronómicos predeterminados, del 13 de Noviembre de 2019, de Premier Crop Systems, LLC: Un sistema operable para aplicar un insumo agrícola y cosechar una producción agrícola en una zona de gestión, comprendiendo el […]
Procedimiento para incrementar rendimientos de cultivos, del 13 de Noviembre de 2019, de Brindyuk, Sergei Vladimirovich: Un procedimiento para incrementar rendimientos de cultivos, a través de la optimización de los tiempos de siembra, que comprende: sembrar […]
Sistema de comunicación inalámbrica para vehículos agrícolas, del 26 de Junio de 2019, de CNH Industrial Italia S.p.A: Un sistema de comunicación inalámbrica para coordinar el movimiento de una pluralidad de vehículos agrícolas, comprendiendo cada vehículo un sistema de posicionamiento […]
Dispositivo de control para la gestión del cultivo de plantas, del 12 de Junio de 2019, de CAPILLA MANZANO, MARC: Dispositivo de control para la gestión del cultivo de plantas, para determinar automáticamente, de acuerdo con informaciones relativas a las plantas […]
Aparato y método para aplicar materiales a cultivos, del 17 de Diciembre de 2018, de TSD Integrated Controls, LLC: Aparato configurado para aplicar material a un cultivo en un campo, que comprende: un vehículo de suministro configurado para moverse […]
MÉTODO Y APARATO PARA DETERMINAR ZONAS DE CRECIMIENTO VEGETAL FAVORABLE, del 4 de Septiembre de 2018, de MARTÍ SAURA, José María: Método y aparato para determinar zonas de crecimiento vegetal favorable. La determinación de las zonas de crecimiento vegetal favorable se realiza mediante la medición […]