Procedimiento y dispositivo de formación de imágenes por ultrasonido.
Procedimiento de formación de imágenes por ultrasonido para obtener imágenes de un campo de observación (8) en un medio para formar imágenes (2) que contiene unos difusores (7),
constando dicho procedimiento de varias etapas sucesivas de medición a lo largo de cada una de las cuales:
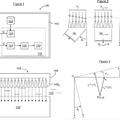
- se hace que una red (3) de transductores (T1-Tn) emita una onda ultrasónica incidente en el campo de observación (8), con una longitud de onda central ;
- a continuación se graban las señales en bruto Sj (i, t) captadas por cada transductor (T1-Tn) y representativas de una onda ultrasónica refleja reverberada por los difusores (7) del medio a partir de la onda incidente, siendo i un índice que designa cada transductor, siendo j un índice que designa cada etapa de medición y designando t el tiempo, extendiéndose la red (3) de transductores a lo largo de al menos una dimensión y propagándose principalmente las ondas incidentes en una dirección de propagación perpendicular a la red de transductores, caracterizado porque se genera un número máximo C de blancos diferenciales, diferentes de una etapa de medición a otra, siendo cada blanco diferencial un difusor (7) que está presente en el campo de observación durante una etapa de medición y ausente durante una etapa de medición inmediatamente contigua, siendo el número C como máximo igual a INT (A/(5λ)2)+1, donde A es un área del campo de observación, y porque dicho procedimiento consta, además, de las siguientes etapas:
- una etapa de tratamiento diferencial a lo largo de la cual se comparan las señales en bruto Sj (i, t) correspondientes a las etapas de medición sucesivas de índice j para extraer de estas unas señales diferenciales Vj (i, t) representativas de variaciones entre señales en bruto de las etapas sucesivas de medición;
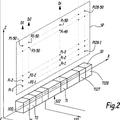
- una etapa de ajuste a lo largo de la cual se determina al menos una función y ≥ Pj (x) correspondiente a cada señal diferencial Vj (i, t), donde x es una variable de espacio que designa una posición perpendicularmente a la dirección de propagación e y es una coordenada que designa la posición de un punto a lo largo de la dirección de propagación correspondiente a un tiempo de trayecto t;
- y una etapa de localización a lo largo de la cual se determina un vértice Aj (x0, y0) de dicha función Pj, que corresponde a la posición del blanco diferencial.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2011/052810.
Solicitante: CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (CNRS).
Nacionalidad solicitante: Francia.
Dirección: 3, rue Michel Ange 75794 Paris Cedex 16 FRANCIA.
Inventor/es: FINK, MATHIAS, TANTER,MICKAEL, COUTURE,OLIVIER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S7/52 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › de sistemas de acuerdo con el grupo G01S 15/00.
PDF original: ES-2523982_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo de formación de imágenes por ultrasonido
Sector de la técnica
La presente invención se refiere a los procedimientos y dispositivos de formación de imágenes por ultrasonido.
De manera más particular, la invención se refiere a un procedimiento de formación de imágenes por ultrasonido para obtener imágenes de un campo de observación en un medio para formar imágenes que contiene unos difusores, comprendiendo dicho procedimiento varias etapas sucesivas de medición a lo largo de cada una de las cuales:
- se hace que una red de transductores emita una onda ultrasónica incidente en el campo de observación, con una longitud de onda central λ; -a continuación se graban las señales en bruto Sj (i, t) captadas por cada transductor y representativas de una onda ultrasónica refleja reverberada por los difusores del medio a partir de la onda incidente, siendo i un índice que designa cada transductor, siendo j un índice que designa cada etapa de medición y designando t el tiempo, extendiéndose la red de transductores a lo largo de al menos una dimensión y propagándose las ondas incidentes principalmente en una dirección de propagación perpendicular a la red de transductores.
Estado de la técnica
En los procedimientos conocidos de este tipo las señales en bruto de los diferentes transductores se combinan entre sí para cada disparo, por ejemplo mediante la formación de trazas, para obtener las imágenes correspondientes a cada disparo. La resolución de la imagen está tradicionalmente limitada a λ/2, donde λ es la longitud de onda de los ultrasonidos (para los ultrasonidos a 1, 5 MHz, λ es del orden de 1 mm en los tejidos humanos blandos) .
Objeto de la invención
La presente invención tiene en particular como objetivo obtener imágenes por ultrasonido con una resolución mejor que λ/2.
Para ello, de acuerdo con la invención, un procedimiento del tipo en cuestión se caracteriza por que genera un número máximo C de blancos diferenciales, diferentes de una etapa de medición a otra, siendo cada blanco diferencial un difusor que está presente en el campo de observación durante una etapa de medición y ausente durante una etapa de medición inmediatamente contigua, siendo el número C como máximo igual a INT (A/ (5λ) 2) +1, donde A es un área del campo de observación, y por que dicho dispositivo consta, además, de las siguientes etapas:
- una etapa de tratamiento diferencial a lo largo de la cual se comparan las señales en bruto Sj (i, t)
correspondientes a unas etapas de medición sucesivas de índice j para extraer de estas unas señales diferenciales Vj (i, t) representativas de variaciones entre señales en bruto de las etapas sucesivas de medición; -una etapa de ajuste a lo largo de la cual se determina al menos una función y = Pj (x) correspondiente a cada señal diferencial Vj (i, t) , donde x es una variable de espacio que designa una posición perpendicularmente a la dirección de propagación e y es una coordenada que designa la posición de un punto a lo largo de la dirección de propagación correspondiente a un tiempo de trayecto t (y = c.t/2 si t es el tiempo de ida y vuelta entre la emisión de la onda incidente y la detección de la onda refleja) ; -y una etapa de localización a lo largo de la cual se determina un vértice Aj (x0, y0) de dicha función Pj, que corresponde a la posición del blanco diferencial.
Hay que señalar que los blancos diferenciales mencionados con anterioridad pueden corresponder por ejemplo a destrucciones sucesivas de microburbujas o elementos similares bajo el efecto de ondas ultrasónicas.
Por medio de estas disposiciones, los difusores que forman los blancos diferenciales mencionados con anterioridad, se activan individualmente y se identifican individualmente a partir de las señales en bruto captadas y no a partir de una imagen ya formada, de tal modo que es posible identificarlos de forma muy precisa en el espacio con una precisión muy inferior a λ/2, que puede llegar por ejemplo hasta λ/200. Las posiciones de los difusores así identificados pueden servir a continuación para construir una imagen del medio, con una resolución muy inferior a λ/2, por ejemplo del orden de entre λ/50 y λ/200. De este modo, la invención propuesta permite mejorar de forma muy significativa la resolución de la formación de imágenes por ultrasonido.
De manera más precisa, la invención permite activar sólo un número limitado de difusores a la vez con el fin de poder distinguir el frente de onda individual procedente de un blanco que se quiere localizar. Al ya no ser el frente de onda una superposición del eco de varios blancos, su forma está definida de forma precisa por la posición de un difusor diferente. Esta posición se puede establecer en prácticamente unos micrómetros. Con el objetivo de solo activar un número limitado de difusores, la invención puede utilizar diferentes efectos de umbral generando o
suprimiendo unos difusores puntuales de ultrasonidos: en particular, los agentes de contraste por ultrasonidos (microburbujas, microgotas o liposomas) se ven afectados por los ultrasonidos que pueden inducir su explosión o su vaporización. Esto genera un blanco que aparece y/o desaparece en un tiempo muy breve, del orden del milisegundo o de algunos milisegundos. El frente de onda vinculado a este difusor puntual se puede obtener en particular restando las señales retrodifundidas cuando el blanco está presente, las señales retrodifundidas cuando el blanco está ausente. En diferentes formas de realización del procedimiento de acuerdo con la invención eventualmente se puede recurrir a, además, una y/u otra de las siguientes disposiciones:
- el número C es como máximo igual a 2, de preferencia igual a 1;
- a lo largo de la etapa de ajuste, se determina la función y = Pj (x) ajustando dicha función para minimizar las diferencias con los puntos Dj (xi, yi) , donde xi es una variable de espacio que designa una posición de cada transductor i perpendicularmente a la dirección de propagación e yi es una coordenada que designa la posición de un punto a lo largo de la dirección de propagación correspondiente a un tiempo de trayecto ti característico de la señal Vj (i, t) (puede tratarse, por ejemplo, del máximo de la señal Vj (i, t) o del frente de onda de la señal Vj (i, t) , u otra) ;
- dicha función P es parabólica; -la etapa de tratamiento diferencial consta de una subetapa de cálculo de señales diferenciales en bruto a lo largo de la cual se determinan unas señales diferenciales en bruto Vbj (i, t) = Sj (i, t) -Sj-1 (i, t) ;
- la etapa de tratamiento diferencial consta de una subetapa de cálculo de señales diferenciales en bruto a lo largo de la cual se determinan unas señales diferenciales en bruto Vbj (i, t) al menos mediante un filtrado de paso alto de las señales en bruto Sj (i, t) en j;
- la etapa de tratamiento diferencial consta, además, de una subetapa de determinación de envolvente a lo largo de la cual se determinan las señales diferenciales Vj (i, t) calculando una envolvente temporal de cada señal diferencial en bruto Vbj (i, t) .
- a lo largo de la etapa de tratamiento diferencial, las señales diferenciales en bruto experimentan un filtrado temporal de paso alto en t antes de la subetapa de determinación de la envolvente;
- la subetapa de determinación de la envolvente consta de un cálculo de una envolvente temporal Vej (i, t) y a continuación de un filtrado de paso bajo de las envolventes temporales Vej (i, t) en i, para obtener las señales diferenciales Vj (i, t) ;
- el campo de observación consta de unas microburbujas que forman dichos difusores y se detectan las microburbujas que han desaparecido del campo de observación de una etapa de medición a otra, formando estas microburbujas desaparecidas dichos blancos diferenciales;
- la onda incidente emitida presenta una amplitud adaptada para destruir el número máximo C de microburbujas en cada etapa de medición;
- la onda incidente emitida en cada etapa de medición presenta una amplitud adaptada para no destruir microburbujas y el procedimiento consta, además, de forma alterna con las etapas de medición, unas etapas de destrucción a lo largo de las cuales se emite una onda ultrasónica destructiva con una amplitud adaptada para destruir el número máximo C de microburbujas en cada etapa de destrucción;
- las posiciones Aj (x0, y0) de los blancos diferenciales sucesivos se añaden en una imagen del campo de observación (obtenida mediante un método de formación de imágenes seleccionado entre la ecografía, la radiología, la IRM, etc.) ;
- dicha... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de formación de imágenes por ultrasonido para obtener imágenes de un campo de observación (8) en un medio para formar imágenes (2) que contiene unos difusores (7) , constando dicho procedimiento de varias etapas sucesivas de medición a lo largo de cada una de las cuales:
- se hace que una red (3) de transductores (T1-Tn) emita una onda ultrasónica incidente en el campo de observación (8) , con una longitud de onda central λ; -a continuación se graban las señales en bruto Sj (i, t) captadas por cada transductor (T1-Tn) y representativas de una onda ultrasónica refleja reverberada por los difusores (7) del medio a partir de la onda incidente, siendo i un índice que designa cada transductor, siendo j un índice que designa cada etapa de medición y designando t el tiempo, extendiéndose la red (3) de transductores a lo largo de al menos una dimensión y propagándose principalmente las ondas incidentes en una dirección de propagación perpendicular a la red de transductores, caracterizado porque se genera un número máximo C de blancos diferenciales, diferentes de una etapa de medición a otra, siendo cada blanco diferencial un difusor (7) que está presente en el campo de observación durante una etapa de medición y ausente durante una etapa de medición inmediatamente contigua, siendo el número C como máximo igual a INT (A/ (5λ) 2) +1, donde A es un área del campo de observación, y porque dicho procedimiento consta, además, de las siguientes etapas:
- una etapa de tratamiento diferencial a lo largo de la cual se comparan las señales en bruto Sj (i, t) correspondientes a las etapas de medición sucesivas de índice j para extraer de estas unas señales diferenciales Vj (i, t) representativas de variaciones entre señales en bruto de las etapas sucesivas de medición; -una etapa de ajuste a lo largo de la cual se determina al menos una función y = Pj (x) correspondiente a cada señal diferencial Vj (i, t) , donde x es una variable de espacio que designa una posición perpendicularmente a la dirección de propagación e y es una coordenada que designa la posición de un punto a lo largo de la dirección de propagación correspondiente a un tiempo de trayecto t; -y una etapa de localización a lo largo de la cual se determina un vértice Aj (x0, y0) de dicha función Pj, que corresponde a la posición del blanco diferencial.
2. Procedimiento de acuerdo con la reivindicación 1, en el que el número C es como máximo igual a 2, de preferencia igual a 1.
3. Procedimiento de acuerdo con la reivindicación 1 o la reivindicación 2, en el que, a lo largo de la etapa de ajuste, se determina la función y = Pj (x) ajustando dicha función para minimizar las diferencias con los puntos Dj (xi, yi) , donde xi es una variable de espacio que designa una posición de cada transductor i perpendicularmente a la dirección de propagación e yi es una coordenada que designa la posición de un punto a lo largo de la dirección de propagación correspondiente a un tiempo de trayecto ti característico de la señal Vj (i, t) .
4. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que la función P es parabólica.
5. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que la etapa de tratamiento diferencial consta de una subetapa de cálculo de señales diferenciales en bruto a lo largo de la cual se determinan las señales diferenciales en bruto Vbj (i, t) = Sj (i, t) -Sj-1 (i, t) .
6. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 1 a 4, en el que la etapa de tratamiento diferencial consta de una subetapa de cálculo de señales diferenciales en bruto a lo largo de la cual se determinan las señales diferenciales en bruto Vbj (i, t) al menos mediante un filtrado de paso alto de las señales en bruto Sj (i, t) en j.
7. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 5 y 6, en el que la etapa de tratamiento diferencial consta, además, de una subetapa de determinación de la envolvente a lo largo de la cual se determinan las señales diferenciales Vj (i, t) calculando una envolvente temporal de cada señal diferencial en bruto Vbj (i, t) .
8. Procedimiento de acuerdo con la reivindicación 7, en el que la subetapa de determinación de la envolvente consta de un cálculo de una envolvente temporal Vej (i, t) y a continuación de un filtrado de paso bajo de las envolventes temporales Vej (i, t) en i, para obtener las señales diferenciales Vj (i, t) .
9. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que el campo de observación (8) consta de unas microburbujas (7) y se detectan las microburbujas que han desaparecido del campo de observación de una etapa de medición a otra, formando estas microburbujas desaparecidas dichos blancos diferenciales.
10. Procedimiento de acuerdo con la reivindicación 9, en el que la onda incidente presenta una amplitud adaptada para destruir el número máximo C de microburbujas (7) en cada etapa de medición.
11. Procedimiento de acuerdo con la reivindicación 9, en el que la onda incidente emitida en cada etapa de medición presenta una amplitud adaptada para no destruir microburbujas (7) y el procedimiento consta, además, de forma alterna con las etapas de medición, de unas etapas de destrucción a lo largo de las cuales se emite una onda ultrasónica destructiva que tiene una amplitud adaptada para destruir el número máximo C de microburbujas (7) en cada etapa de destrucción.
12. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que las posiciones Aj (x0, y0) de los blancos diferenciales sucesivos se añaden en una imagen del campo de observación (8) .
13. Procedimiento de acuerdo con la reivindicación 12, en el que dicha imagen del campo de observación (8) se obtiene mediante ecografía a partir de dicha red (3) de transductores.
14. Dispositivo para la aplicación de un procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, constando este dispositivo de una red (3) de transductores (T1-Tn) controlada por un dispositivo de control y tratamiento (4) adaptado para obtener imágenes de un campo de observación (8) en un medio para formar imágenes (2) que contiene unos difusores (7) , estando el dispositivo de control y tratamiento (4) adaptado para, a lo largo de varias etapas sucesivas de medición:
- hacer que la red de transductores (3) emita una onda ultrasónica incidente en el campo de observación (8) en cada etapa de medición; -a continuación grabar las señales en bruto Sj (i, t) captadas por cada transductor (T1-Tn) y representativas de una onda ultrasónica refleja reverberada por los difusores (7) del medio a partir de la onda incidente, siendo i un índice que designa cada sensor, siendo j un índice que designa cada etapa de medición y designando t el tiempo, extendiéndose la red (3) de transductores a lo largo de al menos una dimensión y propagándose las ondas incidentes principalmente en una dirección de propagación perpendicular a la red de transductores, caracterizado porque el dispositivo de control y tratamiento (4) está adaptado para generar un número máximo C de blancos diferenciales, diferentes de una etapa de medición a otra, siendo cada blanco diferencial un difusor (7) que está presente en el campo de observación durante una etapa de medición y ausente durante una etapa de medición inmediatamente contigua, siendo el número C como máximo igual a INT (A/ (5λ) 2) +1, donde A es un área del campo de observación, y porque el dispositivo de control y tratamiento (4) está, además, adaptado para realizar las siguientes etapas:
- una etapa de tratamiento diferencial a lo largo de la cual se comparan las señales en bruto Sj (i, t) correspondientes a las etapas de medición sucesivas de índice j para extraer de estas unas señales diferenciales Vj (i, t) representativas de variaciones entre señales en bruto de las etapas sucesivas de medición; -una etapa de ajuste a lo largo de la cual se determina al menos una función y = Pj (x) correspondiente a cada señal diferencial Vj (i, t) , donde x es una variable de espacio que designa una posición perpendicularmente a la dirección de propagación e y es una coordenada que designa la posición de un punto a lo largo de la dirección de propagación correspondiente a un tiempo de trayecto t; -y una etapa de localización a lo largo de la cual se determina un vértice Aj (x0, y0) de dicha función Pj, que corresponde a la posición del blanco diferencial.
Patentes similares o relacionadas:
 Método de procesamiento de señales resultantes de una adquisición mediante exploración ultrasónica, programa informático y dispositivo de exploración por ultrasonidos correspondiente, del 29 de Julio de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Metodo de procesamiento de senales (S) resultantes de una adquisicion por exploracion ultrasonica que comprende las siguientes etapas:
[…]
Método de procesamiento de señales resultantes de una adquisición mediante exploración ultrasónica, programa informático y dispositivo de exploración por ultrasonidos correspondiente, del 29 de Julio de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Metodo de procesamiento de senales (S) resultantes de una adquisicion por exploracion ultrasonica que comprende las siguientes etapas:
[…]
Método de reconstrucción de imágenes basado en modelo, del 6 de Mayo de 2020, de ECOLE POLYTECHNIQUE FEDERALE DE LAUSANNE (EPFL): Un método de reconstrucción de imágenes de ondas de pulso que comprende: • transmitir un conjunto de ondas de pulso a un objeto […]
 Procedimiento de imágenes por onda de cizalla e instalación para generar al menos una onda de cizalla, del 25 de Diciembre de 2019, de INSTITUT NATIONAL DE LA SANTE ET DE LA RECHERCHE MEDICALE: Procedimiento para generar al menos una onda de cizalla en una región diana (SP) de un sólido blando (S), incluyendo este procedimiento al menos las siguientes […]
Procedimiento de imágenes por onda de cizalla e instalación para generar al menos una onda de cizalla, del 25 de Diciembre de 2019, de INSTITUT NATIONAL DE LA SANTE ET DE LA RECHERCHE MEDICALE: Procedimiento para generar al menos una onda de cizalla en una región diana (SP) de un sólido blando (S), incluyendo este procedimiento al menos las siguientes […]
Transformar muestras de datos de un A-SCAN en un espacio tridimensional para facilitar la visualización de fallas, del 18 de Diciembre de 2019, de GENERAL ELECTRIC COMPANY: Un método implementado por ordenador, que comprende: utilizar una unidad informática para realizar acciones que comprenden: obtener una pluralidad de […]
Procedimiento para la sincronización de sensores en un bus de datos, del 9 de Octubre de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la sincronización de sensores con un cronómetro independiente, en particular para sistemas de detección del entorno basados […]
Dispositivo y procedimiento para monitorear la posición de un objeto mediante ondas acústicas, del 9 de Octubre de 2019, de ELESTA GmbH: Dispositivo para monitorear la posición de un objeto, así como su distancia de un emisor de ondas acústicas mediante ondas acústicas, con una pieza de sensor con - al […]
Receptor de píxeles con cancelación de capacitancia para aparato de visualización por ultrasonidos, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un aparato, que comprende: una primera capa de metalización (M3) acoplada a una capa piezoeléctrica , en la que se forma una primera […]
Procedimiento y dispositivo para determinar estado de terminal, y terminal, del 14 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de control de una pantalla de un terminal, que comprende: transmitir (S101, S201), por un generador acústico de conducción ósea, una señal de […]