PROCEDIMIENTO Y DISPOSITIVO DE ESTIMACIÓN DE LA VELOCIDAD DE UN MOTOR ELÉCTRICO.
Procedimiento de estimación de la velocidad de rotación (ω
) de un motor eléctrico (M, M') en rodamiento libre, realizándose el procedimiento en un variador de velocidad destinado para controlar el motor generando tensiones alternas de referencia (Va, Vb), comprendiendo el procedimiento: - Una etapa de medición de una corriente de flujo (Id) y de una corriente de par motor (Iq) en una base bifásica ortogonal (d,q), - Una etapa de determinación de las indicadas tensiones alternas de referencia (Va, Vb), realizando una regulación de corriente a partir de corrientes medidas de flujo (Id) y de par (Iq), y a partir de una corriente de referencia (Idref) nula y de una corriente de referencia (Iqref) nula en la indicada base (d,q), caracterizándose el procedimiento por: - Una etapa de cálculo en la cual la velocidad de rotación (ω) se calcula evaluando el ángulo de rotación del vector de tensión cuyas componentes son las indicadas tensiones alternas de referencia (Va, Vb) en una base bifásica ortogonal fija (a, b), utilizando la etapa de cálculo un circuito de enganche de fase (PLL) que recibe en la entrada las tensiones alternas de referencia (Va, Vb) y que proporciona a la salida la velocidad de rotación (ω)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07111287.
Dirección: 33, RUE ANDRE BLANCHET 27120 PACY SUR EURE FRANCIA.
Inventor/es: Nguyen Phuoc,Vinh Tung.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Junio de 2007.
Clasificación Internacional de Patentes:
H02P1/02R
H02P21/14S
Clasificación PCT:
H02P1/02ELECTRICIDAD. › H02PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02PCONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 1/00 Disposiciones para arrancar motores eléctricos o convertidores dinamoeléctricos (arranque de motores síncronos con conmutadores electrónicos H02P 6/20, H02P 6/22; arranque de motores dínamoeléctricos que giran paso a paso H02P 8/04; control vectorial H02P 21/00). › Detalles.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
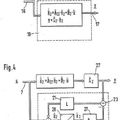
Procedimiento y dispositivo de estimación de la velocidad de un motor eléctrico La presente invención se refiere a un procedimiento de estimación de la velocidad de rotación de un motor eléctrico, de tipo asíncrono o síncrono. Este procedimiento se realiza en el interior de un variador de velocidad y está destinado en particular para ser utilizado en el marco de una recuperación en movimiento rápido del control del motor después de un periodo de rodamiento libre. La invención se refiere también a un dispositivo de estimación de la velocidad de rotación de un motor que utiliza dicho procedimiento, así como a un variador de velocidad que comprende dicho dispositivo de estimación de la velocidad. Para funcionar a velocidad variable, un motor eléctrico está habitualmente pilotado por un variador de velocidad de tipo convertidor de frecuencia. Un variador de este tipo comprende un módulo rectificador que proporciona una tensión de bus continua a partir de una red alterna externa, y un módulo ondulador que comprende componentes semiconductores de potencia con el fin de proporcionar al motor una tensión variable en Modulación de Impulsos en duración (PWM Pulse Width Modulation) en las diferentes fases del motor, a partir de la tensión de bus continua. Cuando un variador de velocidad quiere recuperar el control y el accionamiento del motor después de un periodo de tiempo más o menos largo de rodamiento libre durante el cual el motor continua girando debido a su inercia, es preciso poder conocer antes su velocidad de giro real. Esta operación puede producirse por ejemplo como consecuencia de un corte de suministro inesperado, una detención voluntaria del variador o de un defecto del variador. Si la velocidad está mal calculada, pueden entonces producirse en la recuperación en movimiento rápido saltos de corriente importantes produciendo un riesgo de frenado del motor antes de volver a arrancar así como tirones de velocidad indeseables en el momento de la recuperación. Cuando el variador de velocidad no comprende sensor de velocidad, es preciso por consiguiente realizar un procedimiento de estimación de la velocidad de rotación del motor en rodamiento libre. Existen ya diferentes soluciones para realizar esta estimación de velocidad. Una solución material consiste en utilizar un circuito de medición de tensiones que permite medir dos tensiones entre-fases (por ejemplo U-W y V-W). En razón de la fuerza electromotriz residual debida a la rotación del motor, estas tensiones son sinusoides desfasadas de +/-60 o cuya frecuencia corresponde a la velocidad eléctrica del motor. Un circuito de tratamiento adecuado permite entonces obtener la velocidad y el sentido de rotación del motor. El inconveniente de esta solución es la utilización de un circuito de medición de tensión que debe asegurar una gran dinámica, desde la tensión máxima a la salida del variador hasta la tensión más pequeña posible para las pequeñas velocidades. Este circuito de tensión induce un coste suplementario penalizante. Además, este circuito debe inmunizarse respecto a las perturbaciones aportadas por las grandes longitudes y blindaje de los cables. Existe también una solución de conjunto de programas que consisten en aplicar una tensión pequeña al motor y en realiza un barrido de frecuencia desde la frecuencia máxima positiva hasta la frecuencia máxima negativa. Cuando la frecuencia barrida es igual a la frecuencia de la fuerza electromotriz residual del motor, se observa un paso a cero de la corriente de par Iq, lo cual permite obtener la velocidad del motor. Este método no requiere circuito de medición de tensión, pero presenta sin embargo el inconveniente de hacer pasar corriente no nula al motor durante esta fase de búsqueda, lo cual corre el riesgo de frenarlo ligeramente. Además, si la velocidad del motor es baja o en el sentido negativo, es preciso esperar todo el tiempo de barrido de la frecuencia que puede durar varios segundos antes de obtener la estimación de la velocidad, lo cual hace el método demasiado lento y por consiguiente difícil de utilizar. Por otro lado, el documento JP2004040837, aplicado a un motor síncrono de imán permanente (PMSM Permanent Magnet Sincronous Motor), describe una solución que utiliza una ecuación simplificada Wm = Vqref / Ke, en la cual Wm es la velocidad buscada del motor, Vqref es la componente de tensión de par en una base d,q que gira a la velocidad de sincronismo del motor y Ke es un parámetro motor que representa la constante de f.e.m. (fuerza electromotriz) del motor. Esta solución presenta el inconveniente de necesitar el conocimiento de esta constante de f.e.m. específica para cada tipo de motor. Ahora bien, sería deseable eludir el conocimiento de un parámetro motor de este tipo, con el fin de particularmente simplificar la utilización por el usuario del variador. Además, esta ecuación simplificada solo es valedera si la base d,q gira exactamente a la velocidad correcta de sincronismo del motor. El documento EP 1221765 describe un circuito para calcular una velocidad estimada de rotación del motor a partir de un ángulo estimado de rotación que se calcula por una función Arctg (tan -1 ) aplicada sobre la relación de las tensiones Vqref / Vdrel. La invención tiene por consiguiente por objeto proponer un método programas de estimación de la velocidad del motor que sea sencillo, rápido de poner en práctica, que no necesite sensor de velocidad y que no presente los inconvenientes anteriormente citados. Este método se utilizará en particular en una recuperación en movimiento rápido del control del motor. 2 ES 2 367 928 T3 Para ello, la invención describe un procedimiento de estimación de la velocidad de rotación de un motor eléctrico de rodamiento libre, realizándose el procedimiento en un variador de velocidad destinado para controlar el motor generando tensiones alternas de referencia Va, Vb. El procedimiento comprende una etapa de medición de las corrientes medidas de flujo Id y de par Iq del motor en una base bifásica ortogonal d,q, una etapa de determinación de las indicadas tensiones alternas de referencia Va, Vb, realizando una regulación de corriente a partir de las indicadas corrientes medidas, y a partir de corrientes de referencia Idref e Iqref nulas en la indicada base d,q, y una etapa de cálculo en la cual la velocidad de rotación se calcula evaluando el ángulo de rotación del vector tensión cuyas componentes son las indicadas tensiones alternas de referencia Va, Vb en una base bifásica ortogonal fija a, b. La etapa de cálculo utiliza un circuito de enganche de fase PLL que recibe en la entrada las tensiones alternas de referencia Va, Vb y que proporciona a la salida la velocidad de rotación . Así, la etapa de cálculo del procedimiento utiliza solamente la información de frecuencia y de desfase relativo de las tensiones alternas Va, Vb para calcular la velocidad de rotación estimada, sin necesitar el conocimiento de parámetros del motor. La invención describe también un dispositivo para un procedimiento de estimación de la velocidad de rotación para poner en práctica dicho procedimiento. El dispositivo comprende medios de medición que proporcionan una corriente medida de flujo Id y una corriente medida de par Iq del motor en una base bifásica ortogonal d,q, medios de determinación que proporcionan a la salida las indicadas tensiones alternas de referencia Va, Vb, a partir de las corrientes medidas de flujo Id y de par Iq, y a partir de una corriente de referencia Idref nula y de una corriente de referencia Iqref nula en la indicada base d,q, comprendiendo los medios de determinación un módulo regulador de corriente, y medios de cálculo que calculan la velocidad de rotación evaluando el ángulo de rotación del vector tensión cuyas componentes son las indicadas tensiones alternas de referencia Va, Vb en una base bifásica ortogonal fija a,b. Los medios de cálculo comprenden un módulo de circuito de enganche de fase PLL. Ventajosamente, el procedimiento y el dispositivo descritos se aplican a los motores asíncronos así como a los motores síncronos de imanes permanentes. Según una característica, los medios de medición proporcionan las corrientes medidas de flujo Id y de par Iq en la base d,q girando a una velocidad estimada de sincronismo del motor síncrono. El módulo regulador de corriente proporciona a la salida señales continuas Vdref, Vqref con relación a la indicada base d,q que gira y los medios de determinación comprenden un módulo transformador que recibe las indicadas señales continuas para proporcionar las mencionadas tensiones alternas de referencia Va, Vb. Según otra característica adaptada a un motor asíncrono, los medios de medición proporcionan las corrientes medidas de flujo Id y de par Iq en la base d, q fija. La invención se refiere también... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de estimación de la velocidad de rotación () de un motor eléctrico (M, M) en rodamiento libre, realizándose el procedimiento en un variador de velocidad destinado para controlar el motor generando tensiones alternas de referencia (Va, Vb), comprendiendo el procedimiento: - Una etapa de medición de una corriente de flujo (Id) y de una corriente de par motor (Iq) en una base bifásica ortogonal (d,q), - Una etapa de determinación de las indicadas tensiones alternas de referencia (Va, Vb), realizando una regulación de corriente a partir de corrientes medidas de flujo (Id) y de par (Iq), y a partir de una corriente de referencia (Idref) nula y de una corriente de referencia (Iqref) nula en la indicada base (d,q), caracterizándose el procedimiento por: - Una etapa de cálculo en la cual la velocidad de rotación () se calcula evaluando el ángulo de rotación del vector de tensión cuyas componentes son las indicadas tensiones alternas de referencia (Va, Vb) en una base bifásica ortogonal fija (a, b), utilizando la etapa de cálculo un circuito de enganche de fase (PLL) que recibe en la entrada las tensiones alternas de referencia (Va, Vb) y que proporciona a la salida la velocidad de rotación (). 2. Procedimiento de estimación de la velocidad según la reivindicación 1, caracterizado porque el procedimiento comprende una etapa de espera de eliminación del flujo del motor realizada antes de la etapa de medición. 3. Procedimiento de estimación de la velocidad según la reivindicación 2, caracterizado porque la etapa de espera consiste en una temporización de un valor predeterminado que depende de un nivel de flujo inicial y de una constante rotórica del motor (M). 4. Procedimiento de estimación de la velocidad según la reivindicación 1, caracterizado porque el procedimiento se realiza en una recuperación de movimiento en movimiento rápido del control del motor (M, M). 5. Dispositivo de estimación de la velocidad de rotación () de un motor eléctrico (M,M) en rodamiento libre, estando el dispositivo integrado en un variador de velocidad destinado para controlar el motor por medio de tensiones alternas de referencia (Va, Vb), comprendiendo el dispositivo: - Medios de medición (17) de una corriente medida de flujo (Id) y una corriente medida de par motor (Iq) en una base difásica ortogonal (d, q), - Medios de determinación (10) que proporcionan a la salida las indicadas tensiones alternas de referencia (Va, Vb), a partir de las corrientes medidas de flujo (Id) y de par (Iq), y a partir de una corriente de referencia (Idref) nula y de una corriente de referencia (Iqref) nula en la indicada base (d,q), comprendiendo los medios de determinación (10) un módulo regulador de corriente (11), caracterizándose el dispositivo por: - Medios de cálculo (13) que calculan la velocidad de rotación () evaluando el ángulo de rotación del vector de tensión cuyas componentes son las indicadas tensiones alternas de referencia (Va, Vb) en una base difásica ortogonal fija (a, b), comprendiendo los medios de cálculo (13) un módulo de circuito de enganche de fase (PLL) que recibe en la entrada las tensiones alternas de referencia (Va, Vb) y que proporcionan a la salida la velocidad de rotación (). 6. Dispositivo de estimación de la velocidad según la reivindicación 5, caracterizado porque los medios de medición (17) proporcionan las corrientes medidas de flujo (Id) y de par (Iq) en la base (d,q) que gira a una velocidad de sincronismo del motor (M). 7. Dispositivo de estimación de la velocidad según la reivindicación 6, caracterizado porque el módulo regulador de corriente (11) proporciona a la salida señales continuas (Vdref, Vqref) con relación a dicha base giratoria (d,q) y los medios de determinación (10) comprenden un módulo transformador (12) que transforma las indicadas señales continuas en las mencionadas tensiones alternas de referencia (Va, Vb). 8. Dispositivo de estimación de la velocidad según la reivindicación 5, caracterizado porque los medios de medición (17) proporcionan las corrientes medidas de flujo (Id) y de par (Iq) en la base (d, q) fija. 9. Dispositivo de estimación de la velocidad según la reivindicación 5, caracterizado porque el dispositivo se utiliza en una recuperación de movimiento rápido del control del motor (M,M). 10. Variador de velocidad destinado para el control de un motor eléctrico (M,M), caracterizado porque comprende un dispositivo de estimación de la velocidad de rotación del motor según una de las reivindicaciones 5 a 9. 6 ES 2 367 928 T3 7 REFERENCIAS CITADAS EN LA DESCRIPCIÓN Esta lista de referencias citada por el solicitante es únicamente para la comodidad del lector. No forma parte del documento de patente europea. Aunque se ha tenido gran cuidado al recopilar las referencias, no pueden excluirse errores u omisiones, y la OEP renuncia a cualquier obligación a este respecto. Documentos patentes citados en la descripción ES 2 367 928 T3 JP 2004040837 B [0006] EP 1221765 A [0007] 8
Patentes similares o relacionadas:
PROCEDIMIENTO PARA ESTIMAR LA POSICIÓN DEL ARMAZÓN POLAR EN UNA MÁQUINA POLAR DE GARRAS, del 4 de Enero de 2011, de ROBERT BOSCH GMBH: Procedimiento para determinar la posición de un componente rotatorio de un generador polar de garras , que se hace funcionar en el sistema R-S-T y que […]
DETERMINACION DE LA POSICION INICIAL DEL ROTOR SIN SENSOR EN UN MOTOR SINCRONO, del 6 de Agosto de 2010, de OTIS ELEVATOR COMPANY: Procedimiento para determinar la posición de un rotor respecto a un estator en un motor síncrono, comprendiendo el procedimiento:
inyectar una corriente alterna provista de […]
PROCEDIMIENTO PARA ESTIMAR LA VELOCIDAD DE GIRO DEL ROTOR DE UNA MAQUINA DE INDUCCION TRIFASICA, del 15 de Febrero de 2010, de UNIVERSIDAD POLITECNICA DE MADRID: Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica partiendo de las medidas de corriente y tensión de dos de las fases de alimentación […]
Procedimiento y dispositivo para hacer funcionar un motor eléctrico, del 8 de Julio de 2020, de WÖHNER GMBH & CO. KG ELEKTROTECHNISCHE SYSTEME: Procedimiento para hacer funcionar un motor eléctrico (EM), que comprende las etapas de:
(a) detectar (S1) los cruces por cero y ángulos de fase de fases de tensión […]
Módulo encendedor de motor, del 15 de Abril de 2020, de LSIS Co., Ltd: Un módulo encendedor de motor que se monta en una superficie superior de un contactor magnético , el módulo encendedor de motor comprende
un sustrato […]
Procedimiento y dispositivo de control para equipo de motor, del 7 de Agosto de 2019, de PELLENC: Dispositivo de control para un equipo de motor, que comprende al menos un sensor y una tarjeta electrónica de control del equipo en función de […]
Procedimiento de control de un interruptor controlado que pilota la alimentación de un motor eléctrico, del 27 de Marzo de 2019, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento de control de un interruptor controlado que pilota la alimentación de un motor eléctrico desde una fuente de tensión alterna, […]
Método para sincronizar una máquina eléctrica de reluctancia síncrona, del 20 de Marzo de 2019, de KSB SE & Co. KGaA: Un método para sincronizar una máquina eléctrica de reluctancia síncrona en el que dicha máquina (E) no tiene sensores de tensión de magnetización […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 PROCEDIMIENTO PARA ESTIMAR LA POSICIÓN DEL ARMAZÓN POLAR EN UNA MÁQUINA POLAR DE GARRAS, del 4 de Enero de 2011, de ROBERT BOSCH GMBH: Procedimiento para determinar la posición de un componente rotatorio de un generador polar de garras , que se hace funcionar en el sistema R-S-T y que […]
PROCEDIMIENTO PARA ESTIMAR LA POSICIÓN DEL ARMAZÓN POLAR EN UNA MÁQUINA POLAR DE GARRAS, del 4 de Enero de 2011, de ROBERT BOSCH GMBH: Procedimiento para determinar la posición de un componente rotatorio de un generador polar de garras , que se hace funcionar en el sistema R-S-T y que […] DETERMINACION DE LA POSICION INICIAL DEL ROTOR SIN SENSOR EN UN MOTOR SINCRONO, del 6 de Agosto de 2010, de OTIS ELEVATOR COMPANY: Procedimiento para determinar la posición de un rotor respecto a un estator en un motor síncrono, comprendiendo el procedimiento:
inyectar una corriente alterna provista de […]
DETERMINACION DE LA POSICION INICIAL DEL ROTOR SIN SENSOR EN UN MOTOR SINCRONO, del 6 de Agosto de 2010, de OTIS ELEVATOR COMPANY: Procedimiento para determinar la posición de un rotor respecto a un estator en un motor síncrono, comprendiendo el procedimiento:
inyectar una corriente alterna provista de […] PROCEDIMIENTO PARA ESTIMAR LA VELOCIDAD DE GIRO DEL ROTOR DE UNA MAQUINA DE INDUCCION TRIFASICA, del 15 de Febrero de 2010, de UNIVERSIDAD POLITECNICA DE MADRID: Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica partiendo de las medidas de corriente y tensión de dos de las fases de alimentación […]
PROCEDIMIENTO PARA ESTIMAR LA VELOCIDAD DE GIRO DEL ROTOR DE UNA MAQUINA DE INDUCCION TRIFASICA, del 15 de Febrero de 2010, de UNIVERSIDAD POLITECNICA DE MADRID: Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica partiendo de las medidas de corriente y tensión de dos de las fases de alimentación […]