PROCEDIMIENTO Y DISPOSITIVO DE CIRCUITO PARA LA SUPERVISIÓN DEL FUNCIONAMIENTO DE UN INTERRUPTOR DE POSICIÓN ELECTRÓNICO - MECÁNICO.
Procedimiento para la supervisión del funcionamiento de un interruptor de posición electrónico - mecánico (2),
que contiene una carcasa (4), una varilla de accionamiento (8), un potenciómetro (R1) solicitado por ésta, un microcontrolador (16), al menos un contacto de conmutación electrónico (N1; N2), medios de suministro eléctrico (14) y bornas de conexión (26, 28), detectándose mediante el microcontrolador (16) un potencial de cursor (Vs) presente en el cursor (10) del potenciómetro (R1), evaluándose respecto a un valor umbral (Vr) memorizado y abriéndose o cerrándose el al menos un contacto de conmutación (N1; N2) a través de una señal de control (V1; V2) según si el potencial del cursor (Vs) excede o queda por debajo del valor umbral (Vr), caracterizado por los siguientes pasos de procedimiento: A con los primeros intervalos de test (Δt1) cesan las señales de tipo perro guardián (Vw) que varían dinámicamente, emitidas por el microcontrolador (16), después de lo cual los medios de conmutación (20) que supervisan las señales de tipo perro guardián interrumpen el suministro eléctrico del contacto de conmutación (N1; N2), B después del cambio de estado del contacto de conmutación (N1; N2) supervisado por el microcontrolador (16), del estado cerrado al estado abierto, se emiten de nuevo señales de tipo perro guardián (Vw), mientras que en ausencia del cambio de estado la señal de control (V1; V2) se activa para la apertura del contacto de conmutación (N1; N2), C dentro de los segundos intervalos de test (Δt2) desplazados respecto a los primeros intervalos de test se invierte la señal de control (V1; V2) de cierre para la apertura del contacto de conmutación (N1; N2), D después del cambio de estado del contacto de conmutación (N1; N2) supervisado por el microcontrolador (16), del estado cerrado al estado abierto, la señal de control (V1; V2) se remite a cero para el cierre del contacto de conmutación (N1; N2), mientras que en ausencia del cambio de estado termina la emisión de las señales de tipo perro guardián (Vw)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04010136.
Solicitante: EATON INDUSTRIES GMBH.
Nacionalidad solicitante: Alemania.
Dirección: HEIN-MOELLER-STRASSE 7-11 53115 BONN ALEMANIA.
Inventor/es: WOLFF,BERND, VOLBERG,JURGEN, Högener,Hans-Jürgen , Völlmar,Guido.
Fecha de Publicación: .
Fecha Solicitud PCT: 29 de Abril de 2004.
Clasificación Internacional de Patentes:
- G01D5/165 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › mediante el movimiento relativo entre un punto de contacto y una pista resistiva.
- H01H9/54C
Clasificación PCT:
- H01H9/54 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01H INTERRUPTORES ELECTRICOS; RELES; SELECTORES; DISPOSITIVOS DE PROTECCION DE EMERGENCIA (cables de contacto H01B 7/10; interruptores automáticos de tipo electrolítico H01G 9/18; circuitos de protección, de seguridad H02H; conmutación por medios electrónicos sin cierre de contactos H03K 17/00). › H01H 9/00 Detalles de los dispositivos de conmutación no cubiertos por H01H 1/00 - H01H 7/00. › Circuitos no adaptados a una aplicación particular del dispositivo de conmutación, no previstos en otro lugar.
Clasificación antigua:
- H01H9/54 H01H 9/00 […] › Circuitos no adaptados a una aplicación particular del dispositivo de conmutación, no previstos en otro lugar.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2357398_T3.pdf




Fragmento de la descripción:
La invención se refiere a un procedimiento y una disposición de circuito para la supervisión del funcionamiento de un interruptor de posición electrónico – mecánico según los preámbulos de las reivindicaciones independientes.
En la información de producto de la empresa Klöckner-Moeller W 13-7364, 4/1996 “Überwachen und melden: zuverlässig und sicher, Positionsschalter AT, (Supervisión y notificación: de forma fiable y segura, interruptor de posición AT)” se 5 describe un interruptor de posición electromecánico. En una carcasa están dispuestos contactos de conmutación mecánicos, por ejemplo, pares o contactos individuales de contactos de reposo y/o contactos de cierre y una varilla de cápsula desplazable longitudinalmente para el accionamiento mecánico directo de los contactos de conmutación. Para poder utilizar el interruptor de posición de la forma más variada posible se colocan cabezales de accionamiento intercambiables a la varilla de cápsula. Así puede fijarse en la carcasa del interruptor de posición a elección un cabezal de 10 accionamiento con la palanca de pivotación, palanca de rodillo, palanca de rodillo ajustable o barra de resorte.
Un interruptor de posición electrónico – mecánico se conoce del documento del modelo de utilidad industrial DE 202 03 214 U1. En una carcasa están dispuestos una varilla de accionamiento, un potenciómetro, un microcontrolador y contactos de conmutación electrónicos. La varilla de accionamiento está acoplada con el cursor del potenciómetro. Al accionar la varilla al microcontrolador se le suministra una señal eléctrica variable, que al exceder o quedar por debajo de un valor 15 umbral programado provoca un cambio de estado de los contactos de conmutación. Los contactos de conmutación están unidos en el lado de salida con las bornas de conexión. Para ajustar el punto de inversión se propone programar el valor umbral a través de una conexión programada o a través de un interruptor selectivo o bien seleccionar valores umbral predeterminados a partir de un número memorizado en el microcontrolador. No se dan indicaciones sobre como pueden reconocerse fallos de la electrónica para impedir que la señales de salida incorrectas produzcan controles erróneos en la 20 periferia del interruptor de posición.
Del documento DE 37 34 431 C2 se conoce un procedimiento para la supervisión del cambio de estado de conexiones de nivel final para elementos de regulación del estado cerrado al estado abierto. Durante el funcionamiento continuo se interrumpen las señales de conexión de forma periódica por señales de test. Tiene lugar una realimentación a un microordenador de las conexiones de nivel final, microordenador que en ausencia del cambio de estado se ocupa de que 25 las conexiones de nivel final se pongan por un tiempo en el estado abierto. Las señales de test son más breves que el tiempo de reacción del elemento de ajuste. No tiene lugar una supervisión del microordenador.
La invención tiene por ello como objetivo la supervisión del funcionamiento de un interruptor de posición electrónico - mecánico.
Partiendo de un procedimiento o una disposición de circuito del tipo mencionado al inicio, el objetivo se resuelve según la 30 invención por las características correspondientes de las reivindicaciones independientes, mientras que de las reivindicaciones dependientes pueden deducirse variantes ventajosas de la invención.
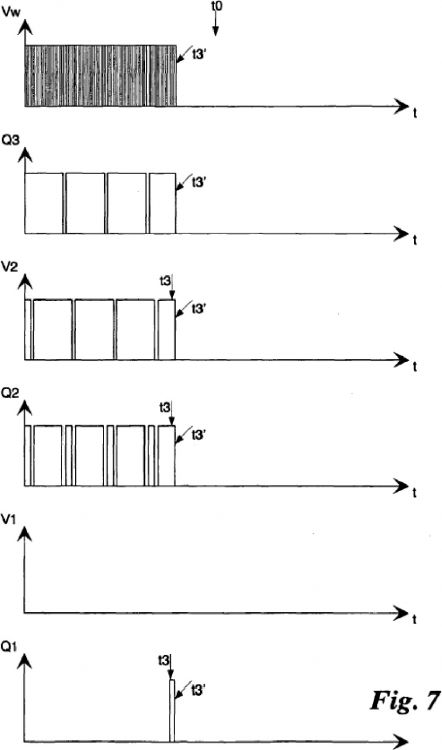
El procedimiento según la invención comprueba, por un lado, la supervisión de tipo perro guardián y, por otro lado, la capacidad de desconexión de al menos un contacto de conmutación electrónico. La supervisión de tipo perro guardián sirve para reconocer fallos del microcontrolador y cambiar el contacto de conmutación de forma segura al estado abierto 35 para evitar los controles erróneos en la periferia del interruptor de posición. Para ello de forma conocida se generan por el microcontrolador señales de tipo perro guardián, que permiten el cierre en ausencia en caso de un fallo del microcontrolador. Con el término “capacidad de desconexión” se quiere decir que al sobrepasar el punto de inversión por la varilla en la dirección correspondiente abre también realmente el contacto de conmutación hasta entonces cerrado. Al comprobar la función de tipo perro guardián se comprueba de forma preventiva en el microcontrolador con buen 40 funcionamiento con los pasos del procedimiento A y B, si una ausencia de las señales de tipo perro guardián se reconoce también realmente por los medios de conmutación que supervisan las señales de tipo perro guardián. Al comprobar la capacidad de desconexión se prueba con los pasos del procedimiento C y D, si el contacto de conmutación que se encuentra en el estado cerrado está en condiciones de abrirse. El estado cerrado del contacto de conmutación electrónico se consigue con buen funcionamiento por el nivel de señal de cierre de la señal de control. No obstante, durante la emisión 45 de la señal de control de cierre puede ocurrir un fallo de los componentes en el recorrido de la salida del microcontrolador hasta el contacto de conmutación, en este caso el contacto de conmutación no puede adoptar el estado abierto, por ejemplo, debido al fallo de los electrodos de salida del contacto de conmutación electrónico. Fallos semejantes deben reconocerse de forma temprana ya que en determinadas circunstancias la varilla de accionamiento no atraviesa el punto de inversión durante un periodo largo. 50
En el caso de desarrollo positivo de los tests según los pasos del procedimiento A, B y C, D, los primeros y segundos intervalos de test determinados esencialmente por los tiempos de retardo condicionados por el material y el programa, en los que se abre brevemente el contacto de conmutación cerrado, tienen una pequeña duración (típicamente de 200 a 400 μs) y por consiguiente sin influencia apreciable en la periferia del interruptor de posición.
Los primeros y segundos intervalos de test ocurren convenientemente a distancias periódicas, preferiblemente según una 55
distancia temporal que comprende 500 a 1200 ciclos de programa del microcontrolador, lo que se corresponde con un periodo de test de 2 a 6 s.
Una variante ventajosa del procedimiento según la invención consiste en que para la supresión de interferencias ocasionales sólo en ausencia repetida del cambio de estado esperado del contacto de conmutación durante el primer o el segundo intervalo de test, es decir, sólo después del ciclo repetido de los pasos del procedimiento A a D, el contacto de 5 conmutación se abre de forma permanente. Un número de respectivamente dos ciclos del procedimiento conduce ya a una mejora considerable de la resistencia a interferencias.
Otra variante ventajosa consiste en que para la mejora de la supervisión del funcionamiento, el estado lógico predeterminado por el microcontrolador se compara adicionalmente por lectura con el estado físico real del al menos un contacto de conmutación y en que en caso de no coincidencia, la señal de control adopta el nivel de señal de apertura, así 10 como no se interrumpe la emisión de las señales de tipo perro guardián.
Como resultado de una supervisión incorrecta de tipo perro guardián, de una capacidad de desconexión insuficiente o de un estado de salida no lógico es ventajoso emitir por el microcontrolador una señal de notificación de error, por ejemplo, para la excitación de un indicador LED montado en la carcasa.
Con el circuito de conmutación según la invención, inclusive el microcontrolador controlado por programa, se comprueba 15 gracias a un hardware tanto la supervisión de tipo perro guardián como también la capacidad de desconexión del al menos un contacto de conmutación electrónico.
Un temporizador activo registra las señales de tipo perro guardián que parten del microcontrolador y adopta diferentes estados de salida según si están presentes señales de tipo perro guardián que varían dinámicamente o no. Al existir señales de tipo perro guardián, el temporizador activa un excitador de suministro para la aplicación de un potencial de 20 suministro en al menos un circuito de salida, que contiene el al menos un contacto de conmutación. Con el inicio de los primeros intervalos de test el microcontrolador interrumpe las señales de tipo perro guardián, después de lo cual el temporizador desactiva el excitador de suministro para la separación del circuito de salida del potencial de suministro. Si el contacto de conmutación se encontrase anteriormente en... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la supervisión del funcionamiento de un interruptor de posición electrónico - mecánico (2), que contiene una carcasa (4), una varilla de accionamiento (8), un potenciómetro (R1) solicitado por ésta, un microcontrolador (16), al menos un contacto de conmutación electrónico (N1; N2), medios de suministro eléctrico (14) y bornas de conexión (26, 28), detectándose mediante el microcontrolador (16) un potencial de cursor (Vs) presente en el cursor (10) del 5 potenciómetro (R1), evaluándose respecto a un valor umbral (Vr) memorizado y abriéndose o cerrándose el al menos un contacto de conmutación (N1; N2) a través de una señal de control (V1; V2) según si el potencial del cursor (Vs) excede o queda por debajo del valor umbral (Vr), caracterizado por los siguientes pasos de procedimiento:
A con los primeros intervalos de test (∆t1) cesan las señales de tipo perro guardián (Vw) que varían dinámicamente, emitidas por el microcontrolador (16), después de lo cual los medios de conmutación (20) que supervisan las 10 señales de tipo perro guardián interrumpen el suministro eléctrico del contacto de conmutación (N1; N2),
B después del cambio de estado del contacto de conmutación (N1; N2) supervisado por el microcontrolador (16), del estado cerrado al estado abierto, se emiten de nuevo señales de tipo perro guardián (Vw), mientras que en ausencia del cambio de estado la señal de control (V1; V2) se activa para la apertura del contacto de conmutación (N1; N2), 15
C dentro de los segundos intervalos de test (∆t2) desplazados respecto a los primeros intervalos de test se invierte la señal de control (V1; V2) de cierre para la apertura del contacto de conmutación (N1; N2),
D después del cambio de estado del contacto de conmutación (N1; N2) supervisado por el microcontrolador (16), del estado cerrado al estado abierto, la señal de control (V1; V2) se remite a cero para el cierre del contacto de conmutación (N1; N2), mientras que en ausencia del cambio de estado termina la emisión de las señales de tipo 20 perro guardián (Vw).
2. Procedimiento según la reivindicación precedente, caracterizado por la aparición periódica de los primeros y los segundos intervalos de test (∆t1; ∆t2).
3. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque los primeros y los segundos intervalo de test (∆t1; ∆t2) aparecen después de un intervalo de tiempo de 500 a 1200 ciclos de programa del 25 microcontrolador (16).
4. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque sólo después de la ausencia repetida del cambio de estado esperado durante el primer o segundo intervalo de test (∆t1; ∆t2), cambia la señal de control (V1; V2) para la apertura del contacto de conmutación (N1; N2).
5. Procedimiento según una de las reivindicaciones precedentes, caracterizado por 30
E la comparación del estado de conmutación del al menos un contacto de conmutación (N1; N2) con la especificación lógica por el microcontrolador (16) fuera de los intervalos de test (∆t1; ∆t2) y, en caso de no coincidencia, activación o mantenimiento de la señal de control (N1; N2) para la apertura así como finalización de las señales de tipo perro guardián (Vw).
6. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque el microcontrolador (16) emite 35 una señal de notificación de error después de determinar un error.
7. Disposición de circuito para la supervisión del funcionamiento de un interruptor de posición electrónico - mecánico (2), que contiene una carcasa (4), una varilla de accionamiento (8), un potenciómetro (R1) solicitado por ésta, un microcontrolador (16), al menos un contacto de conmutación electrónico (N1; N2), medios de suministro eléctrico (14) para la facilitación de los potenciales de suministro (Vbb; Vdd) y bornas de conexión (26, 28), detectándose mediante el 40 microcontrolador (16) un potencial de cursor (Vs) presente en el cursor (10) del potenciómetro (R1), evaluándose respecto a un valor umbral (Vr) memorizado y abriéndose o cerrándose el al menos un contacto de conmutación (N1; N2) a través de una señal de control (V1; V2) según si el potencial del cursor (Vs) excede o queda por debajo del valor umbral (Vr), caracterizada porque
- el microcontrolador (16) dispone de una salida de señales de tipo perro guardián (PTB2), a través de la que se 45 emiten a señales de tipo perro guardián (Vw) que varían dinámicamente y se interrumpen con los primeros intervalos de test (∆t1),
- con la salida de señales de tipo perro guardián (PTB2) está unido un temporizador (22), cuya salida al aparecer las señales de tipo perro guardián (Vw) adopta un primer estado de salida y por lo demás un segundo estado de salida, 50
- con el temporizador (22) está unido un excitador de suministro (N3), cuya salida (Q3) transmite un potencial de suministro (Vbb) suministrado en el primer estado de salida del temporizador (22) y en otro caso lo bloquea,
- el al menos un contacto de conmutación (N1; N2) es parte de al menos un circuito de salida (18; 19) que se alimenta por la salida (Q3) del excitador de suministro (N3),
- el microcontrolador (16) dispone de al menos una salida de control (PTB5; PTB3) conducida al circuito de salida 5 (18; 19) para la al menos una señal de control (V1; V2) que, durante el nivel de señal de cierre, adopta brevemente el nivel de señal de apertura dentro de los segundos intervalos de test (∆t2), desplazados respecto a los primeros intervalos de test (∆t1), y
- el microcontrolador (16) dispone de al menos una entrada de control (PTB6; PTB4) que está unida funcionalmente con la salida (Q1; Q2) del al menos un contacto de conmutación (N1; N2), tratando el microcontrolador (16) la señal 10 de control presente en la entrada de control (PTB6; PTB4), de forma que en el primer intervalo de test (∆t1) después del cambio del contacto de conmutación (N1; N2) del estado cerrado al estado abierto, se emiten de nuevo las señales de tipo perro guardián (Vw), mientras que en ausencia del cambio de estado la señal de control (V1; V2) se convierte de forma permanente al nivel de estado de apertura, y en el segundo intervalo de test (∆t2), en ausencia de cambio de estado del contacto de conmutación (N1; N2) del estado cerrado al estado abierto, la 15 emisión de las señales de tipo perro guardián (Vw) no ocurre por consiguiente.
8. Disposición de circuito según la reivindicación precedente, caracterizada porque el temporizador (22) está constituida sucesivamente por un primer nivel de amplificación, provisto en el lado de entrada de un diferenciador pasivo (23) y por un segundo nivel de amplificación (31), provisto en el lado de entrada de un integrador pasivo (24).
9. Disposición de circuito según una de las dos reivindicaciones precedentes, caracterizada porque entre la salida (Q1; 20 Q2) del contacto de conmutación (N1; N2) y la entrada de control (PTB6; PTB4) está dispuesto un nivel de amplificación (32; 33) adicional.
10. Disposición de circuito según la reivindicación precedente, caracterizada porque el nivel de amplificación (32; 33) adicional está provisto de medios de circuito antiparásitos (C6; C5).
11. Disposición de circuito según una de las reivindicaciones 7 a 10, caracterizada porque el microcontrolador (16) 25 dispone de una salida de notificación (AD1), que está unida con un elemento de señal óptico (H1) y que, debido a la ausencia del cambio de estado del contacto de conmutación (N1; N2) del estado cerrado al estado abierto, emite una señal de estado durante los primeros o segundos intervalos de test (∆t1; ∆t2).
Patentes similares o relacionadas:
Sistemas y métodos de gestión de administración de fármacos, del 15 de Abril de 2019, de LIFESCAN, INC.: Un sistema de gestión de la diabetes que comprende: una unidad de gestión de datos que incluye: una memoria ; […]
 Dispositivo de mando y procedimiento para la evaluación de un dispositivo de mando, del 16 de Marzo de 2012, de E.G.O. ELEKTRO-GERATEBAU GMBH: Dispositivo de mando , particularmente para un aparato eléctrico como por ejemplo una placa de cocción, para la conversión de un movimiento […]
Dispositivo de mando y procedimiento para la evaluación de un dispositivo de mando, del 16 de Marzo de 2012, de E.G.O. ELEKTRO-GERATEBAU GMBH: Dispositivo de mando , particularmente para un aparato eléctrico como por ejemplo una placa de cocción, para la conversión de un movimiento […]
 PROCEDIMIENTO PARA LA OPERACIÓN DE UN INTERRUPTOR DE POSICIÓN ELECTRÓNICO-MECÁNICO, del 4 de Marzo de 2011, de EATON INDUSTRIES GMBH: - Procedimiento para la operación de un interruptor de posición electrónico - mecánico , que contiene una carcasa , una varilla de accionamiento , […]
PROCEDIMIENTO PARA LA OPERACIÓN DE UN INTERRUPTOR DE POSICIÓN ELECTRÓNICO-MECÁNICO, del 4 de Marzo de 2011, de EATON INDUSTRIES GMBH: - Procedimiento para la operación de un interruptor de posición electrónico - mecánico , que contiene una carcasa , una varilla de accionamiento , […]
 PROCEDIMIENTO Y DISPOSITIVO PARA LA VERIFICACION DEL TRATAMIENTO DE SEÑALES, del 24 de Septiembre de 2010, de POTAIN: Procedimiento para la verificación del tratamiento de señales de seguridad, más particularmente de una señal (Se) suministrada por un captador de tipo analógico resistivo, […]
PROCEDIMIENTO Y DISPOSITIVO PARA LA VERIFICACION DEL TRATAMIENTO DE SEÑALES, del 24 de Septiembre de 2010, de POTAIN: Procedimiento para la verificación del tratamiento de señales de seguridad, más particularmente de una señal (Se) suministrada por un captador de tipo analógico resistivo, […]
SENSOR DE POSICION MAGNETICO PASIVO., del 16 de Marzo de 2006, de SIEMENS AKTIENGESELLSCHAFT: Sensor de posición magnético pasivo, que está constituido por un substrato con una red de resistencia dispuesta sobre este substrato, a la que está asociada […]
SISTEMA DE UNION DE ROTOR DE UN SENSOR DE GIRO CON EL EJE DE UN ORGANO DE GIRO., del 16 de Marzo de 2004, de HELLA KG HUECK & CO.: SE DESCRIBE UN SENSOR DE GIRO, DONDE ENTRE EL ROTOR Y EL EJE SE HAN PREVISTO ELEMENTOS DE UNION. LOS ELEMENTOS DE UNION MUESTRAN CASQUILLOS Y PIVOTES, QUE […]
SENSOR GIRATORIO DE RESISTENCIA., del 16 de Abril de 2003, de HELLA KG HUECK & CO.: LA INVENCION SE REFIERE A UN SENSOR GIRATORIO DE RESISTENCIA FORMADO POR UN SOPORTE DE BARRIDO, INCRUSTADO EN EL EXTREMO FINAL DE UN EJE; UNA PLACA DE CIRCUITO IMPRESO CON LOS […]
PROCEDIMIENTO PARA LA EVALUACIÓN DE UN POTENCIÓMETRO Y CIRCUITO CON UN POTENCIÓMETRO, del 12 de Diciembre de 2011, de E.G.O. ELEKTRO-GERATEBAU GMBH: Procedimiento para la evaluación de un potenciómetro (PT1, PT2), que presenta una primera conexión (A1), una segunda conexión (A2) y una toma intermedia (ZA), donde una […]