Procedimiento y disposición para la estimación de al menos un parámetro de un intruso.
Procedimiento para estimar, a partir de un vehículo (100), parámetros (→
rmín ;→rmáx ;→mín v ;→máx v ) de un intruso,
que comprende las etapas de:
- generar cuadros consecutivos de datos de imagen en diferentes momentos de dicho intruso por medio de al menos un sensor pasivo (210);
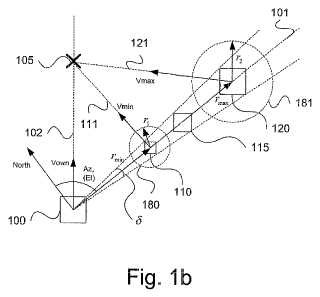
- determinar una dirección (101) desde el vehículo (100) hacia el intruso (115) sobre la base de los cuadrosconsecutivos generados de datos de imagen;
- estimar de un período de tiempo (TTG) restante hasta una colisión potencial entre el vehículo (100) y elintruso (115) basada en el procesamiento de datos de imagen asociados con al menos dos imágenesgeneradas diferentes;
caracterizado porque comprende las etapas adicionales de:
- estimar una extensión angular (δmedido) del intruso (115), tal como se ve mediante el sensor pasivo (215),sobre la base de los datos de imagen; y
- estimar un primer vector de ubicación relativo (→rmín ) a un intruso mínimo (110) asociado con el intruso, enel que el intruso mínimo (110) corresponde a una ubicación más cercana posible del intruso (115) a lo largode la dirección (101); y
- estimar un segundo vector de ubicación relativa (→rmáx ) a un intruso máximo (120) asociado con el intruso,en el que el intruso máximo (120) corresponde a una posible ubicación más distante del intruso (115) a lolargo de la dirección (101), en el que la estimación del primer vector de posición relativo (→rmín ) y el segundovector de posición relativo (→rmáx ) se basa en al menos uno del período de tiempo (TTG) y de la extensiónangular (δmedido).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08172260.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: SUNDQVIST,BENGT-GORAN, Petrini,Erik, PERSSON,ANDREAS, PELLEBERGS,JOHAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S11/12 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G06K9/00 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
- G06T7/00 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
- G08G5/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Sistemas anticolisión.
PDF original: ES-2402832_T3.pdf
Fragmento de la descripción:
Procedimiento y disposición para la estimación de al menos un parámetro de un intruso
Campo técnico
La presente invención se refiere a una disposición y a un procedimiento para estimar, a partir de una plataforma, al menos un parámetro, tal como el rango y la velocidad relativa de un intruso. En particular, la invención se refiere a una disposición y un procedimiento para generar datos de entrada a un sistema de detectar y evitar a bordo de una plataforma. La invención también se refiere a un programa informático y un producto de programa informático. La invención también se refiere a una plataforma que lleva la disposición.
Antecedentes de la técnica Hoy en día varias plataformas, tales como aeronaves, están provistas de sistemas anticolisión para evitar colisiones con otros objetos en el entorno de la propia nave. Estos sistemas están diseñados para detectar otros objetos que pueden ellos mismos ser plataformas, también referidas como intrusos, determinar cómo evitar una posible colisión futura y, cuando sea necesario, proporcionar una guía para evitar la posible colisión mediante una maniobra de la plataforma de tal manera que se siga una ruta de escape segura generada.
En el campo de la aviónica son conocidos los llamados sistemas detectar y evitar (sistemas S&A) . Estos difieren de los presentes sistemas anti-colisión en que pueden controlar directa y automáticamente la aeronave. Estos están actualmente en las primeras etapas de desarrollo, y existe una necesidad de mejorar la fiabilidad, la precisión y el rendimiento general de tales sistemas, no solamente desde un punto de vista de la seguridad del vuelo.
Asimismo, en el campo de la aviónica, los altos estándares se han establecido respecto al criterio de certificación de equipos de aeronaves. Ello será especialmente cierto en el caso de que la aeronave sea un UAV (vehículo aéreo no tripulado) .
El documento DE 102006039104 A1 describe un procedimiento para determinar la distancia de objetos basado en datos de imagen.
Sumario de la invención Es un objeto de la invención que proporcionar un procedimiento mejorado y una disposición para la estimación de parámetros de un intruso.
Es otro objeto proporcionar un procedimiento robusto y una disposición para la estimación de parámetros de un intruso.
Es también un objeto de la invención proporcionar un procedimiento alternativo y una disposición para la estimación de parámetros de un intruso.
Otro objeto más de la invención es proporcionar un procedimiento y disposición para proporcionar datos precisos de entrada a un sistema detectar y evitar de a bordo de una plataforma, por ejemplo, un vehículo tal como una nave propia.
Otro objeto más de la invención es proporcionar un procedimiento y una disposición para proporcionar una capacidad mejorada para sobrevivir para una nave propia.
Estos objetos se consiguen mediante un procedimiento de acuerdo con la reivindicación 1.
Mediante el uso de un sensor pasivo para generar cuadros consecutivos de datos de imagen en tiempos diferentes, se logra un procedimiento de bajo coste para la generación de al menos un parámetro del intruso.
El procedimiento puede comprender además la etapa de:
-determinar un intervalo del vector de ubicación relativo al intruso sobre la base de dicho primer vector de ubicación relativa y dicho segundo vector de ubicación relativa. De este modo, se logra una estimación sobre un intervalo dentro del cual se encuentra el intruso.
El procedimiento puede comprender además la etapa de:
-estimar un primer vector de velocidad del intruso mínimo, y/o
-estimar un segundo vector de velocidad de intruso máximo.
Mediante la estimación de un vector de velocidad de intruso mínimo y/o máximo, se puede proporcionar una información más completa como entrada a un sistema de detectar y evitar a bordo del vehículo, lo que puede ser beneficioso en un proceso de determinación de una trayectoria de distancia de vuelo.
El procedimiento puede comprender además la etapa de:
-proporcionar al menos uno del primer vector de ubicación relativa y de dicho segundo vector de ubicación relativo con un sistema de detectar y evitar a bordo del vehículo a fin de evitar una colisión entre dicho vehículo y dicho intruso. Sobre la base de al menos un vector de ubicación relativa y del sistema de detectar y evitar del vehículo se puede determinar una ruta de escape adecuada y controlar el vehículo de tal manera que se evita una posible colisión futura entre dicha plataforma y dicho intruso. En caso de que el vehículo sea una aeronave se puede determinar una ruta de vuelo adecuada.
El procedimiento puede comprender además la etapa de:
-estimar dicho vector de primera ubicación relativa a un intruso mínimo sobre la base de una anchura predeterminada asociada con el intruso mínimo, una extensión angular más pequeña para la cual el sensor pasivo puede detectar un objeto, y dicha extensión angular estimada del intruso. Esto permite estimar dicho primer vector de ubicación relativa en una manera eficaz en el tiempo y confiable.
El procedimiento puede comprender además la etapa de:
-estimar dicho segundo vector de ubicación relativa con el intruso máximo sobre la base de dicho período de tiempo estimado que queda hasta una colisión potencial entre la plataforma y el intruso. Esto permite estimar dicho segundo vector de ubicación relativa manera eficaz en el tiempo y confiable.
El procedimiento puede comprender además la etapa de:
-estimar dicho segundo vector de ubicación relativa al intruso máximo sobre la base de una anchura máxima predeterminada de intrusos y dicha extensión estimada angular del intruso. Esto permite estimar dicho segundo vector de ubicación relativa de manera eficaz en el tiempo y confiable.
Un aspecto de la invención se refiere también a un programa informático que comprende un código de programa para, a partir de un vehículo, estimar al menos un parámetro de un intruso, cuando dicho programa informático se ejecuta en un ordenador.
Un aspecto de la invención se refiere a un producto de programa informático que comprende un código de programa almacenado en un medio legible por ordenador, para, desde un vehículo, estimar al menos un parámetro de un intruso, cuando dicho programa informático se ejecuta en un ordenador.
Un aspecto de la invención se refiere a una disposición para estimar, a partir de un vehículo, al menos un parámetro de un intruso, que comprende:
-medios para generar cuadros consecutivos de datos de imagen en diferentes momentos de dicho intruso por medio de al menos un sensor pasivo;
-medios para determinar una dirección desde la plataforma al intruso sobre la base de los cuadros consecutivos generados de datos de imagen;
-medios para estimar un período de tiempo que queda hasta una colisión potencial entre el vehículo y el intruso basado en el procesamiento de los datos de imagen asociados con al menos dos imágenes generadas diferentes,
-medios para estimar una extensión angular del intruso, como se ve mediante el sensor pasivo, sobre la base de los datos de imagen; y
-medios para estimar un primer vector de ubicación relativo a un intruso mínimo asociado con el intruso, en el que el intruso mínimo corresponde a una ubicación más cercana posible del intruso a lo largo de la dirección, y
-medios para estimar un segundo vector de ubicación relativa a un intruso máximo asociado con el intruso, en el que el intruso máximo corresponde a una posible ubicación más distante del intruso a lo largo de la dirección, en el que la estimación del primer vector de ubicación relativa y el segundo vector de ubicación relativa se basan en al menos uno del período de tiempo y de la extensión angular.
La disposición puede comprender además medios para determinar un intervalo del vector de ubicación relativo a un intruso en la base de dicho primer vector de ubicación relativa y dicho segundo vector de ubicación relativa.
La disposición puede comprender además medios para la estimación de un primer vector de velocidad del intruso mínimo, y/o medios para estimar un segundo vector de velocidad de intruso máximo.
La disposición puede comprender además medios para proporcionar al menos un primer vector de ubicación relativa y dicho segundo vector de ubicación relativa con un sistema de detectar y evitar a bordo de la plataforma a fin de evitar una colisión entre dicha plataforma y dicho intruso.
Un aspecto de la invención se refiere a un vehículo, en el que el vehículo se selecciona... [Seguir leyendo]
Reivindicaciones:
!!! !
1. Procedimiento para estimar, a partir de un vehículo (100) , parámetros ( ; ; ; ) de un intruso,
rmín rmáx vmín vmáx
que comprende las etapas de:
-generar cuadros consecutivos de datos de imagen en diferentes momentos de dicho intruso por medio de al menos un sensor pasivo (210) ;
-determinar una dirección (101) desde el vehículo (100) hacia el intruso (115) sobre la base de los cuadros consecutivos generados de datos de imagen;
-estimar de un período de tiempo (TTG) restante hasta una colisión potencial entre el vehículo (100) y el intruso (115) basada en el procesamiento de datos de imagen asociados con al menos dos imágenes generadas diferentes;
caracterizado porque comprende las etapas adicionales de:
-estimar una extensión angular (δmedido) del intruso (115) , tal como se ve mediante el sensor pasivo (215) , sobre la base de los datos de imagen; y
!
-estimar un primer vector de ubicación relativo ( ) a un intruso mínimo (110) asociado con el intruso, en
rmín el que el intruso mínimo (110) corresponde a una ubicación más cercana posible del intruso (115) a lo largo de la dirección (101) ; y
!
-estimar un segundo vector de ubicación relativa ( ) a un intruso máximo (120) asociado con el intruso,
rmáx
en el que el intruso máximo (120) corresponde a una posible ubicación más distante del intruso (115) a lo !
largo de la dirección (101) , en el que la estimación del primer vector de posición relativo ( ) y el segundo
rmín !
vector de posición relativo ( ) se basa en al menos uno del período de tiempo (TTG) y de la extensión rmáx
angular (δmedido) .
2. Procedimiento según la reivindicación 1, que comprende además la etapa de:
-determinar un intervalo del vector de ubicación relativo para el intruso (115) sobre la base de dicho primer
!!
vector de ubicación relativo ( ) y dicho segundo vector de ubicación relativo ( ) .
rmín rmáx
3. Procedimiento según la reivindicación 1 ó 2, que comprende además la etapa de:
!
-estimar un primer vector de velocidad ( ) del intruso mínimo, y/o
vmín !
-estimar un segundo vector de velocidad ( ) del intruso máximo.
vmáx
4. Procedimiento según cualquiera de las reivindicaciones 1 a 3, que comprende además la etapa de:
!
-proporcionar al menos uno del primer vector de ubicación relativo ( ) y de dicho segundo vector de
rmín !
ubicación relativo ( ) a un sistema de detectar y evitar (320) a bordo del vehículo a fin de evitar una rmáx
colisión entre dicho vehículo y dicho intruso.
5. Procedimiento según cualquiera de las reivindicaciones 1 a 4, que comprende además la etapa de:
!
-estimar dicho primer vector de ubicación relativo ( ) a un intruso mínimo sobre la base de una anchura
rmín predeterminada (bmín) asociada con el intruso mínimo, la extensión angular más pequeña (δpixel) para la cualel sensor pasivo puede detectar un objeto, y dicha extensión angular estimada (δmedido) del intruso.
6. Procedimiento según cualquiera de las reivindicaciones 1 a 5, que comprende además la etapa de:
!
-estimar dicho segundo vector de ubicación relativo ( ) para el intruso máximo sobre la base de dicho
rmáx
período de tiempo estimado (TTG) restante hasta una colisión potencial entre el vehículo y el intruso.
7. Procedimiento según cualquiera de las reivindicaciones 1 a 5, que comprende además la etapa de:
!
-estimar dicho segundo vector de ubicación relativo ( ) para el intruso máximo sobre la base de una
rmáx
anchura máxima predeterminada del intruso (bmáx) y dicha extensión angular estimada (δmedido) del intruso.
8. Programa informático que comprende un código de programa para, desde un vehículo, estimar parámetros de un intruso de acuerdo con cualquiera de las reivindicaciones 1 a 7, cuando dicho programa informático se ejecuta en un ordenador (200) .
9. Producto de programa informático que comprende un código de programa almacenado en un medio legible por ordenador, para, desde un vehículo, estimar los parámetros de un intruso de acuerdo con cualquiera de las reivindicaciones 1 a 7, cuando dicho programa informático se ejecuta en un ordenador (200) .
!!! !
10. Disposición dispuesta sobre un vehículo (100) para estimar los parámetros ( ; ; ; ) de un rmín rmáx vmín vmáx
intruso (115) , que comprende:
-medios (210) para generar cuadros consecutivos de datos de imagen en diferentes momentos de dicho intruso por medio de al menos un sensor pasivo;
-medios (230) para determinar una dirección desde la plataforma al intruso sobre la base de los cuadros consecutivos generados de datos de imagen;
-medios (240) para la estimación de un período de tiempo (TTG) restante hasta una colisión potencial entre el vehículo y el intruso basada en el procesamiento de datos de imagen asociados con al menos dos imágenes generadas diferentes,
caracterizada porque comprende:
-medios (250) para la estimación de una extensión angular (δ medido) del intruso, como se ve mediante el sensor pasivo, sobre la base de los datos de imagen; y
!
-medios (310; 200) para estimar un primer vector de ubicación relativo ( ) a un intruso mínimo asociado
rmín con el intruso, en el que el intruso mínimo (110) corresponde a una ubicación más cercana posible del intruso (115) a lo largo de la dirección (101) , y
!
-medios (310; 200) para estimar un segundo vector de ubicación relativo ( ) a un intruso máximo
rmáx
asociado con el intruso, en el que el intruso máximo (120) corresponde a una posible ubicación más distante del intruso (115) a lo largo de la dirección (101) , en el que la estimación del primer vector de !!
ubicación relativo ( ) y el segundo vector de ubicación relativo ( ) se basa en al menos uno del
rmín rmáx
período de tiempo (TTG) y de la extensión angular (δmedido) .
11. Disposición según la reivindicación 10, que comprende además:
-medios (310; 200) para determinar un intervalo del vector de ubicación relativo a un intruso sobre la base
!!
de dicho primer vector de ubicación relativo ( ) y de dicho segundo vector de posición relativo ( ) .
rmín rmáx
12. Disposición según la reivindicación 10 u 11, que comprende además:
!
-medios (310; 200) para la estimación de un primera vector de velocidad ( ) del intruso mínimo, y/o
vmín !
-medios (310; 200) para la estimación de un segundo vector de velocidad ( ) del intruso máximo.
vmáx
13. Dispositivo, según cualquiera de las reivindicaciones 10 a 12, que comprende además:
!
-medios (310; 200) para proporcionar al menos uno del primer vector de ubicación relativo ( ) y de
rmín !
dicho segundo vector de posición relativo ( ) a un sistema de detectar y evitar (320) a bordo del
rmáx
vehículo a fin de evitar una colisión entre dicho vehículo y dicho intruso.
14. Vehículo (100) , en el que el vehículo comprende un vehículo seleccionado de un grupo que comprende una aeronave, un vehículo espacial una embarcación o un vehículo de tierra, que tiene una disposición de acuerdo con cualquiera de las reivindicaciones 10 a 14 a bordo.
Patentes similares o relacionadas:
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]