PROCEDIMIENTO Y DISPOSICION PARA DETECTAR LA FORMA ESPACIAL DE UN OBJETO.
Un procedimiento para detectar la forma espacial y otras propiedades físicas de un objeto,
en el que un objeto (2) provisto de marcas (4) evaluables fotogramétricamente se coloca en un punto predeterminado sobre una superficie provista de otras marcas (6) evaluables fotogramétricamente y dispuestas entre sí de manera predeterminada, presentando la superficie una extensión tal que las demás marcas (6) quedan dispuestas alrededor de la superficie de apoyo del objeto (2), que se encuentra sobre la superficie, así como en el que varias fotografías del objeto (2) se realizan desde distintas vistas de modo que, además del objeto (2), se reproduce también al menos parcialmente la superficie (5) y a partir de las fotografías se determina la forma espacial del objeto (2) con ayuda de las marcas (4) del objeto y las demás marcas (6) de la superficie (2) mediante un procedimiento fotogramétrico, caracterizado porque la superficie se forma mediante una placa (5) que contiene sensores que detectan otras propiedades físicas del objeto (2)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP02/05038.
Solicitante: CORPUS.E AG.
Nacionalidad solicitante: Alemania.
Dirección: SENEFELDERSTRASSE 8,70178 STUTTGART.
Inventor/es: RUTSCHMANN,DIRK, JOSTEN,MARCUS.
Fecha de Publicación: .
Fecha Concesión Europea: 7 de Abril de 2010.
Clasificación Internacional de Patentes:
- A61B5/107 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Medida de dimensiones corporales, p. ej. la talla del cuerpo entero o de partes del mismo.
- G01B11/24 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de contornos o curvaturas.
- G01C11/02 G01 […] › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 11/00 Fotogrametría o videogrametría, p. ej. estereogrametría; Topografía fotográfica. › Disposiciones para tomar fotografías especialmente adaptadas para la fotogrametría o la topografía fotográfica, p. ej. control de la superposición de fotografías.
Clasificación PCT:
- A61B5/107 A61B 5/00 […] › Medida de dimensiones corporales, p. ej. la talla del cuerpo entero o de partes del mismo.
- G01B11/24 G01B 11/00 […] › para la medida de contornos o curvaturas.
- G01C11/02 G01C 11/00 […] › Disposiciones para tomar fotografías especialmente adaptadas para la fotogrametría o la topografía fotográfica, p. ej. control de la superposición de fotografías.
Clasificación antigua:
- A61B5/107 A61B 5/00 […] › Medida de dimensiones corporales, p. ej. la talla del cuerpo entero o de partes del mismo.
- G01B11/24 G01B 11/00 […] › para la medida de contornos o curvaturas.
- G01C11/02 G01C 11/00 […] › Disposiciones para tomar fotografías especialmente adaptadas para la fotogrametría o la topografía fotográfica, p. ej. control de la superposición de fotografías.
Fragmento de la descripción:
Procedimiento y disposición para detectar la forma espacial de un objeto.
La invención se refiere a un procedimiento y una disposición para detectar la forma espacial de un objeto, por ejemplo, una pierna humana.
La detección óptica, sin contacto, de la forma espacial tridimensional de cuerpos y partes del cuerpo tiene una gran importancia en la fabricación automatizada de productos a medida que deben estar adaptados a la forma individual del cuerpo como, por ejemplo, productos ortopédicos, zapatos a medida, ropa ajustada perfectamente al cuerpo, etc. El conocimiento de la forma espacial tiene también una importancia especial para la selección automatizada de productos adecuados en un catálogo de productos prefabricados. Como ejemplo se podría mencionar la selección de una plantilla adecuada de pie en un catálogo grande de plantillas prefabricadas mediante el juego individual de datos en 3D de la forma del pie del comprador.
Para la detección de la forma espacial se conoce una gran cantidad de procedimientos costosos de exploración. En el documento EP0760622BI se describe, por ejemplo, un procedimiento especialmente costoso del inventor Robert Massen, en el que el cuerpo, que se va a digitalizar, se provee de un revestimiento elástico marcado fotogramétricamente y a continuación se fotografía desde una serie de posiciones de toma de fotografía que se solapan. En este caso, la parte del cuerpo no ha de estar orientada de un modo especialmente exacto respecto a la cámara ni se necesitan posiciones calibradas de toma de fotografía de la cámara o de las cámaras, por lo que las fotografías necesarias en 2D se pueden realizar incluso a mano alzada con una cámara digital.
En la solicitud de patente DE10025922.7 del mismo inventor se describe una serie de procedimientos adecuados de marcación que posibilitan la localización automatizada de puntos homólogos de imagen en las fotografías individuales que se solapan y, por tanto, permiten una digitalización fotogramétrica completamente automática.
En la solicitud de patente DE10049926.0 del mismo inventor se describen cámaras que mediante la proyección de marcas de puntería permiten una secuencia ordenada de posiciones orientadas de toma de fotografía y, por tanto, simplifican nuevamente la obtención automática de puntos homólogos de imagen.
Del documento DE-19634254 se conoce la detección fotogramétrica de la forma espacial de un objeto, proyectándose un modelo de luz sobre el objeto y estando dispuestas las marcas alrededor de la superficie de apoyo del objeto que se encuentra sobre una superficie.
Todos estos procedimientos basados en la fotogrametría trabajan con marcas fijadas en el cuerpo, lo que resulta especialmente desventajoso cuando se deben fotografiar partes delgadas del cuerpo marcadas mediante un revestimiento elástico, ya que todas las marcas se encuentran esencialmente en una sección estrecha en el centro de la imagen de la cámara fotográfica. Esto se aplica a todas las posiciones espaciales que se solapan y se han fotografiado desde una vista panorámica. Por tanto, los puntos homólogos de imagen están concentrados asimismo en una sección estrecha de cada fotografía individual. En el caso de la orientación fotogramétrica de las fotografías individuales, esto provoca grandes errores e imprecisiones, ya que los rayos visuales se cortan en un ángulo plano y, por tanto, el punto de corte está definido sólo de un modo inexacto en el espacio. Por consiguiente, no es posible determinar exactamente del modo deseado la forma espacial de un objeto.
Además, en el caso de estos procedimientos conocidos para la obtención de coordenadas espaciales absolutas debe haber un trayecto recto conocido en al menos dos fotografías. Como las marcas en el revestimiento elástico no definen un trayecto recto establecido en el espacio, se ha de colocar una escala rígida conocida en el campo visual de manera adicional al cuerpo que se va a digitalizar. Para la evaluación fotogramétrica automática se ha de reconocer automáticamente esta escala en las fotografías individuales y evaluar de manera separada de las marcas fotogramétricas del cuerpo.
El objetivo de la invención es crear un procedimiento y una disposición para la detección fotogramétrica de la forma espacial de un objeto, que posibiliten una detección más exacta de la forma espacial especialmente en el caso de cuerpos delgados. Además, según la invención resulta innecesaria la escala prevista en los procedimientos existentes hasta el momento. Este objetivo se consigue mediante un procedimiento según la reivindicación y un dispositivo según la reivindicación 9.
Como las marcas fotogramétricas, que definen la disposición sobre la superficie, se pueden configurar de manera que en el campo visual de las posiciones individuales de toma de fotografía de un cuerpo delgado que se va a digitalizar, están muy separadas de las marcas detectadas del cuerpo que se concentran en el centro de la imagen, éstas representan haces homólogos de rayos que se cortan en un ángulo obtuso y posibilitan así una orientación fotogramétrica exacta de las posiciones individuales de toma de fotografía. Esto permite digitalizar también cuerpos delgados con una exactitud suficiente.
Además, la disposición predeterminada de marcas sobre la superficie puede sustituir también la escala usual hasta el momento, ya que la distancia definida entre las marcas fotogramétricas de la disposición de marcas colocadas sobre la superficie puede servir como escala.
En las reivindicaciones dependientes aparecen variantes ventajosas de la invención.
Otras características y ventajas de la invención se derivan de la siguiente descripción de un ejemplo de realización por medio de los dibujos. Los dibujos muestran:
Fig. 1 una forma preferida de realización de la invención con un sistema de coordenadas en forma de placa, en el que el objeto, que se va a detectar, es la parte inferior de una persona y
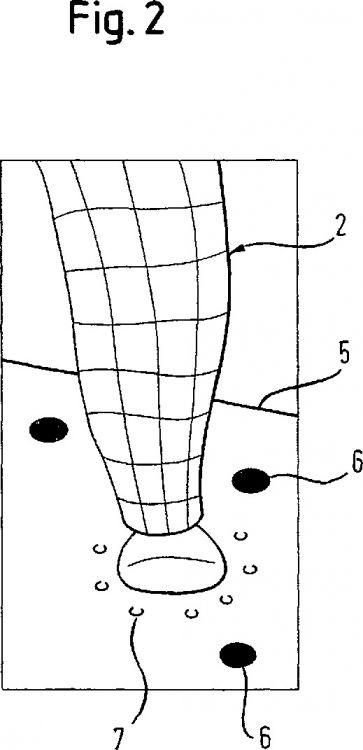
Fig. 2 el área de la imagen de una fotografía realizada según el procedimiento, según la invención, del objeto que aparece representado en la figura 2 y se va a detectar.
El procedimiento según la invención o la disposición según la invención se describen a modo de ejemplo por medio de la detección de la forma espacial de la parte inferior de una persona para la fabricación a medida de calcetines de compresión. Sin embargo, la descripción de este ejemplo no se ha de entender como límite.
En la figura 1 se puede observar el cuerpo 1 de una persona. En este caso se ha de detectar la forma tridimensional de una parte del cuerpo 1, a saber la parte inferior 2 del cuerpo. A tal efecto, la parte inferior del cuerpo está provista de un revestimiento elástico en forma de unas pantys 3. En las pantys 3 están colocadas marcas fotogramétricas en forma de una rejilla, definiendo los puntos de corte de las líneas de la rejilla marcas puntiformes 4 evaluables fotogramétricamente.
La parte inferior 2 del cuerpo está situada sobre una placa 3 que forma un sistema bidimensional de coordenadas (ejes x-y). Sobre la placa 3 están colocadas marcas puntiformes 6, evaluables fotogramétricamente, que definen el sistema de coordenadas. Las marcas puntiformes 6 están colocadas en puntos predeterminados sobre la placa 5 de tal modo que definen un sistema de coordenadas x-y. Las marcas puntiformes 6 están dispuestas alrededor de la superficie de apoyo de la parte inferior del cuerpo sobre la superficie 5. Esta superficie de apoyo se define en la figura 1 mediante las suelas de la persona que lleva puesta las pantys. La parte inferior 2 del cuerpo está dispuesta sobre la placa de modo que tiene una orientación determinada respecto al sistema de coordenadas x-y. En este caso, sobre la placa están colocadas otras marcas 7 (no evaluables fotogramétricamente) previstas para los pies de la persona, de modo que se garantiza una orientación determinada de la parte inferior 2 del cuerpo respecto a la superficie. La distancia conocida entre dos marcas puntiformes cualquiera 6 de la placa crea un trayecto recto en el espacio y representa, por tanto, una escala para la obtención de coordenadas espaciales absolutas. El plano formado por las marcas de la placa representa, por ejemplo, el plano x-y de un sistema universal de coordenadas, en el que el cuerpo del paciente está orientado aproximadamente en paralelo al eje Z. El punto cero de este sistema de coordenadas se establece asimismo convenientemente por medio de las marcas de la placa, por ejemplo, en el centro entre dos marcas fotogramétricas...
Reivindicaciones:
1. Un procedimiento para detectar la forma espacial y otras propiedades físicas de un objeto, en el que un objeto (2) provisto de marcas (4) evaluables fotogramétricamente se coloca en un punto predeterminado sobre una superficie provista de otras marcas (6) evaluables fotogramétricamente y dispuestas entre sí de manera predeterminada, presentando la superficie una extensión tal que las demás marcas (6) quedan dispuestas alrededor de la superficie de apoyo del objeto (2), que se encuentra sobre la superficie, así como en el que varias fotografías del objeto (2) se realizan desde distintas vistas de modo que, además del objeto (2), se reproduce también al menos parcialmente la superficie (5) y a partir de las fotografías se determina la forma espacial del objeto (2) con ayuda de las marcas (4) del objeto y las demás marcas (6) de la superficie (2) mediante un procedimiento fotogramétrico, caracterizado porque la superficie se forma mediante una placa (5) que contiene sensores que detectan otras propiedades físicas del objeto (2).
2. Un procedimiento según la reivindicación 1, caracterizado porque los sensores detectan al menos una de las siguientes magnitudes:
3. Un procedimiento según la reivindicación 1 ó 2, en el que las demás marcas (6) evaluables fotogramétricamente de la superficie (2) están dispuestas entre sí de manera que forman un sistema bidimensional de coordenadas.
4. Un procedimiento según la reivindicación 3, en el que el sistema de coordenadas se define mediante marcas negras puntiformes (6) que están colocadas a distancias determinadas entre sí sobre la superficie (5).
5. Un procedimiento según una de las reivindicaciones precedentes, en el que sobre la superficie (5) se colocan otras marcas (7) que facilitan la orientación del objeto (2) sobre la superficie.
6. Un procedimiento según una de las reivindicaciones precedentes, en el que la superficie (5) está configurada de manera que se deforma al situarse el objeto (2) sobre la superficie (5).
7. Un procedimiento según la reivindicación 6, en el que con ayuda del procedimiento fotogramétrico se determina la deformación de la superficie (5) y a partir de esto se calculan propiedades físicas del objeto (2).
8. Un procedimiento según una de las reivindicaciones precedentes, en el que el objeto (2) es un cuerpo humano o una parte del cuerpo humano.
9. La disposición para detectar la forma espacial y otras propiedades físicas de un objeto con marcas (4) evaluables fotogramétricamente que están colocadas sobre el objeto (2), con una superficie provista de otras marcas (6) evaluables fotogramétricamente que están dispuestas entre sí de manera predeterminada, presentando la superficie (5) una extensión tal que las demás marcas (6) quedan dispuestas alrededor de la superficie de apoyo del objeto (2), que se encuentra sobre la superficie, así como con un sistema (9) de toma de fotografía y un sistema (10) para la evaluación de las fotografías y la determinación de la forma espacial, caracterizada porque la superficie está formada sobre una placa (5) que contiene sensores que permiten detectar otras propiedades físicas del objeto (2).
10. La disposición según la reivindicación 9, caracterizada porque los sensores están configurados para detectar al menos una de las siguientes magnitudes:
11. La disposición según la reivindicación 9 ó 10, en la que el sistema (10) para la evaluación de las fotografías y la determinación de la forma espacial está configurado de manera que con ayuda de las marcas (4) del objeto y las marcas (6) de la superficie (5) se puede determinar la forma espacial del objeto (2).
12. La disposición según la reivindicación 9, 10 u 11, en la que las demás marcas (6) evaluables fotogramétricamente de la superficie (2) están dispuestas entre sí de manera que forman un sistema bidimensional de coordenadas.
13. La disposición según la reivindicación 12, en la que el sistema de coordenadas se define mediante marcas negras puntiformes (6) que están colocadas a distancias determinadas entre sí sobre la superficie (5).
14. La disposición según una de las reivindicaciones 9 a 13, en la que sobre la superficie (5) están colocadas otras marcas (7) para facilitar la orientación del objeto (2) sobre la superficie (5).
15. La disposición según una de las reivindicaciones 9 a 14, en la que la superficie (5) está configurada de manera que se deforma al situarse el objeto (2) sobre la superficie (5).
16. La disposición según la reivindicación 15, en la que con ayuda del sistema (10) para la evaluación de las fotografías y la determinación de la forma espacial se determina la deformación de la superficie (5) y a partir de esto se calculan propiedades físicas del objeto (2).
17. La disposición según una de las reivindicaciones 9 a 16, en la que el objeto (2) es un cuerpo humano o una parte del cuerpo humano.
18. Un procedimiento según una de las reivindicaciones 1 a 8 o disposición según una de las reivindicaciones 9 a 17, en el que o en la que el objeto (2) está provisto de un revestimiento (3), sobre el que están colocadas las marcas (4) evaluables fotogramétricamente.
Patentes similares o relacionadas:
Transferencia con control de contorno, del 29 de Julio de 2020, de JUNGHEINRICH AKTIENGESELLSCHAFT: Disposición para el control de contorno de palés que deben almacenarse en un sistema de estanterías, que comprende: una estación de transferencia […]
Dispositivo y procedimiento para medir la forma de una porción de pared de un horno de coque, del 15 de Julio de 2020, de Centre de Pyrolyse du Charbon de Marienau: Un dispositivo para medir una forma de una porción de pared de un horno de coque , comprendiendo el dispositivo : - una caja […]
Dispositivo y método para medir la rectitud de una pieza de trabajo en forma de varilla, del 15 de Julio de 2020, de MSG Maschinenbau GmbH: Dispositivo para medir la rectitud de una pieza de trabajo en forma de varilla con un soporte para la pieza de trabajo en forma de varilla y un aparato para detectar […]
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución y procedimiento correspondiente, del 1 de Abril de 2020, de DWFritz Automation, Inc: Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución, denominada pieza hueca que va a controlarse, comprendiendo […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método: la introducción de datos del modelo asociado con la pieza de trabajo […]
Equipo y procedimiento para la fabricación de piezas de prótesis dental, del 18 de Marzo de 2020, de INSTITUT STRAUMANN AG: Equipos de captación de superficies y equipos de generación de superficies, con equipos para la detección parcial o totalmente automática de bordes de preparaciones […]
Sistema con integración de interfaz de usuario 3D, del 5 de Febrero de 2020, de 3SHAPE A/S: Un sistema que comprende: -por lo menos un visualizador , donde el por lo menos un visualizador está adaptado para representar visualmente una […]