Procedimiento para discriminación de primer plano y segundo plano.
Procedimiento para discriminación de vectores de primer plano (1) - segundo plano (2) en una cuadrículadimensionada por bloques de NxN que comprende un campo vectorial de movimiento en una región de oclusiónpara aplicaciones de visualización de vídeo caracterizado porque comprende además las etapas de;
- detección de continuidad (111, 112, 113, 114) y discontinuidad (211, 212, 213, 214) de trayectorias haciaadelante (111, 113, 211, 213) y hacia atrás (112, 114, 212, 214) de vectores (101, 103) de primer plano (1) yvectores (201, 203) de segundo plano (2) de dicho campo vectorial de movimiento,
- cálculo de diferencia de vectores de movimiento según la continuidad (111, 112, 113, 114) y la discontinuidad(211, 212, 213, 214) de vectores (101, 103) de primer plano (1) y vectores (201, 203) de segundo plano (2),- acumulación de dichas diferencias de vectores de movimiento para cada uno de dichos vectores de lacuadrícula a lo largo tanto de la trayectoria hacia adelante y como hacia atrás del vector de movimiento delbloque central de la cuadrícula.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10189608.
Solicitante: VESTEL ELEKTRONIK SANAYI VE TICARET A.S.
Nacionalidad solicitante: Turquía.
Dirección: ORGANIZE SANAYI BÖLGESI 45030 MANISA TURQUIA.
Inventor/es: OZKALAYCI,BURAK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T7/20 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 7/00 Análisis de imagen. › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
PDF original: ES-2421738_T3.pdf
Fragmento de la descripción:
Procedimiento para discriminación de primer plano y segundo plano
Campo técnico
[0001]Esta invención se refiere a un procedimiento pata discriminación de primer plano (FG) y de segundo plano (BG) para aplicaciones de procesamiento de vídeo mediante la determinación de si los vectores de movimiento pertenecen al primer plano o al segundo plano de acuerdo con una métrica evaluada.
Estado de la técnica
La falta de discriminación de primer plano – segundo plano (FG - BG) produce muchos problemas en procesos de aplicaciones de vídeo tales como segmentación del objeto, segmentación de movimiento y aplicaciones de tasa de conversión ascendente de trama (FRUC) . El problema de efecto de halo en la etapa de interpolación compensada de movimiento en aplicaciones FRUC, se produce a lo largo del objeto - límites de movimiento, ya que, los vectores de movimiento FG- BG no son discriminados en las regiones de halo. Además, este efecto de halo es causado por las regiones cubiertas y descubiertas entre dos tramas sucesivas utilizadas para la interpolación. El recubrimiento y descubrimiento son causados por la diferencia de velocidad entre los objetos de FG y BG. Por lo tanto, con el fin de reducir o evitar el efecto de halo alrededor del objeto - límites de movimiento, el vector de movimiento BG debe ser utilizado en la interpolación unidireccional de las regiones de oclusión (regiones recubiertas / descubiertas) . Para este propósito, Debe describirse el procedimiento de discriminación de vector FG- BG. [0003] En el documento W02008/091205A1, se describe un procedimiento para procesamiento de imágenes que implica la determinación de un movimiento global entre una trama de referencia y una trama actual en una secuencia de tramas. Dicho procedimiento de procesamiento de imágenes implica la determinación de un parámetro de clasificación para un grupo actual de, al menos, un elemento de imagen en dicha trama actual de dicha secuencia de tramas. Se determina una representación de dicho movimiento global de valores de propiedad de elemento de imagen a partir de dicha trama de referencia en la secuencia para dicha trama actual. Se identifica un grupo de referencia en dicha trama de referencia para dicho grupo actual utilizando la representación de movimiento global determinada. Entonces, dicho parámetro de clasificación se calcula a partir de una diferencia entre los valores de propiedad de dichos elementos de imagen de grupo actual y dicho grupo de referencia. Este parámetro de clasificación calculado se utiliza para determinación de FG - BG. Como se menciona en el documento W02008/091205A1, cuando dicho parámetro sobrepasa un umbral el grupo es considerado como un grupo de primer plano de la trama de lo contrario, pertenece al segundo plano. [0004] En el documento EE.UU. 2002/0085096 A1, se describe un método para detección de vectores de primer plano o de fondo cerca de una discontinuidad en un campo vectorial. Para detectar dicho vector de primer plano o de segundo plano en dicho campo vectorial, se comprueba la existencia de situación de recubrimiento y descubrimiento. A continuación, se determinan las velocidades de movimiento de los objetos de primer plano y de segundo plano. De acuerdo con estas velocidades determinadas, se identifican vectores FG -BG. [0005] En la presente invención, la discriminación de primer plano – segundo plano se realiza mediante la propuesta métrica de discriminación basada en la continuidad o discontinuidad de los vectores de su propia trayectoria con vecindad espacial
Breve descripción de la invención [0006] La presente invención explica un método para discriminación de FG - BG. Para discriminar entre FG y BG, se utiliza una métrica de discriminación fiable y robusta. Dicha métrica de discriminación se calcula mediante la acumulación de diferencias de vectores en un campo vector de movimiento. En dicho campo de vectores de movimiento se detectan continuidades y discontinuidades del FG y BG. De acuerdo con dicha comprobación de continuidad, se acumulan las diferencias vectoriales y se calcula la acumulación en la memoria intermedia. El análisis de valoración de la métrica de discriminación representa que cuando la diferencia acumulada es mayor, mayor es la probabilidad de ser vector de movimiento de BG.
Objetivo de la invención [0007] El objeto de la presente invención es proporcionar un nuevo enfoque para discriminación de FG - BG proponiendo una nueva métrica de discriminación de FG - BG. [0008] Otro objeto de la presente invención es proporcionar una discriminación métrica FG – BG robusta fiable alrededor de regiones de oclusión basada en la continuidad de movimiento en el espacio temporal. [0009] Otro objeto de la invención es proporcionar una discriminación métrica mediante la acumulación de las diferencias vectoriales de acuerdo con la continuidad de movimiento en un campo vectorial de movimiento. [0010] Otro objeto de la invención es comprobar la continuidad de vectores de movimiento en una cuadrícula dimensionada por bloques de NxN por una ventana o núcleo.
Otro objeto de la invención es reducir o evitar los artefactos de halo alrededor de los objetos / límites de movimiento.
Breve descripción de los dibujos
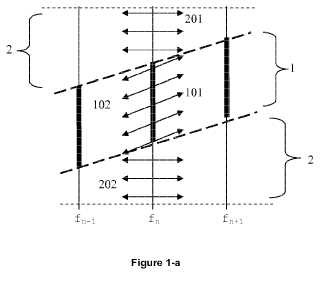
La figura 1-a: muestra campos de vector de movimiento estimado en direcciones hacia adelante y hacia atrás para primer plano en desplazamiento.
La figura 1-b: muestra campos de vector de movimiento estimado en direcciones hacia adelante y hacia atrás para primer plano estacionario.
La figura 2-a: muestra vectores de continuidad de primer plano y discontinuidad de segundo plano de dos campos de vectores de movimiento consecutivos en dirección hacia adelante y en el espacio temporal para primer plano en desplazamiento.
La figura 2-b: muestra vectores de continuidad de primer plano y discontinuidad de segundo plano de dos campos de vectores de movimiento consecutivos en dirección hacia adelante y en el espacio temporal para primer plano estacionario.
La figura 3-a: muestra una demostración de sección transversal unidimensional para una ventana o núcleo de 3x3.
La figura 3-b: muestra una demostración de sección transversal unidimensional de una ventana o núcleo de tamaño 3x3 para segundo plano.
Los números de referencia que los usados en las figuras pueden poseer los siguientes significados.
Primer Plano (1) Vector de primer plano hacia adelante para primer plano en movimiento (101) Vector de primer plano hacia atrás para primer plano en movimiento (102) Vector de primer plano hacia adelante para primer plano estacionario (103) Vector de primer plano hacia atrás para segundo plano estacionario (104) Continuidad de vector de primer plano hacia delante para primer plano en movimiento (111) Continuidad de vector de primer plano hacia atrás para primer plano en movimiento (112) Segundo plano (2) Vector de segundo plano hacia delante para primer plano en movimiento (201) Vector de segundo plano hacia atrás para primer plano en movimiento (202) Vector de segundo plano hacia delante para primer plano estacionario (203) Fondo vector hacia atrás para primer plano estacionario (204) Discontinuidad vector de segundo plano hacia adelante para primer plano en movimiento (211) Discontinuidad vector de segundo plano hacia atrás para primer plano en movimiento (212)
Descripción detallada de la invención
La presente invención proporciona un procedimiento para discriminación de primer plano (FG) (1) – segundo plano (BG) (2) para aplicaciones de vídeo. La discriminación de FG (1) - BG (2) tiene importancia en numerosos procesos de aplicaciones de vídeo, tales como la segmentación del objeto, la segmentación del movimiento y la tasa de conversión ascendente de trama (FRUC) . Durante dichos procesos, se producen efectos de halo alrededor de objeto - límites de movimiento, ya que no se considera la discriminación de FG
(1) - BG (2) . La falta de discriminación de FG – BG, produce la utilización de vectores de movimiento erróneos en la región de oclusión. Para reducir o evitar los efectos de halo, se debe llevar a cabo una interpolación unidireccional en la región de oclusión. Para una interpolación unidireccional apropiada, debe hacerse una discriminación FG (1) - BG (2) .
La presente invención comprende una métrica de discriminación para discriminación FG (1) - BG (2) . Con el fin de adoptar medidas para el cálculo de métrica de discriminación se supone que las asignaciones de vectores de movimiento en las regiones de oclusión son lo suficientemente precisas para representar un movimiento verdadero. En otras palabras, el campo vector de movimiento estimado para una... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para discriminación de vectores de primer plano (1) – segundo plano (2) en una cuadrícula dimensionada por bloques de NxN que comprende un campo vectorial de movimiento en una región de oclusión para aplicaciones de visualización de vídeo caracterizado porque comprende además las etapas de;
- detección de continuidad (111, 112, 113, 114) y discontinuidad (211, 212, 213, 214) de trayectorias hacia adelante (111, 113, 211, 213) y hacia atrás (112, 114, 212, 214) de vectores (101, 103) de primer plano (1) y vectores (201, 203) de segundo plano (2) de dicho campo vectorial de movimiento,
- cálculo de diferencia de vectores de movimiento según la continuidad (111, 112, 113, 114) y la discontinuidad (211, 212, 213, 214) de vectores (101, 103) de primer plano (1) y vectores (201, 203) de segundo plano (2) ,
- acumulación de dichas diferencias de vectores de movimiento para cada uno de dichos vectores de la cuadrícula a lo largo tanto de la trayectoria hacia adelante y como hacia atrás del vector de movimiento del bloque central de la cuadrícula.
2. Procedimiento según la reivindicación 1, en el que, la detección de continuidad (111, 112, 113, 114) y discontinuidad (211, 212, 213, 214) de las trayectorias se lleva a cabo en una ventana o núcleo que contiene los vectores vecinos.
3. Procedimiento según la reivindicación 1, en el que, la acumulación se realiza para cada vector (101, 102, 103, 104, 201, 202, 203, 204) mediante exploración con dicha ventana o núcleo centrada (o) con cada vector en dicho campo vectorial de movimiento.
4. Procedimiento de acuerdo con la reivindicación 1 en el que la acumulación se realiza utilizando métrica de distancia L2.
5. Procedimiento de acuerdo con la reivindicación 1 en el que la acumulación se realiza utilizando métrica de distancia L1.
6. Procedimiento de acuerdo con la reivindicación 1, en el que, el cálculo de acumulación de memoria intermedia que contiene además las etapas de,
- puesta a cero de la memoria intermedia de la diferencia vectorial (Dbuf) para todos los bloques de vectores de movimiento. Dbuf = 0
- cálculo de la trayectoria hacia adelante y hacia atrás, cruzando emplazamientos de bloque, xf, xb, en los campos de vectores de movimiento de tramas anteriores y posteriores, xf = (x + vt (x) ) / N y xb = (x-vt (x) ) / N donde vt (x) es el vector de movimiento del bloque espacialmente en x, temporalmente en el instante t, y siendo N el tamaño de bloque en unidades de píxel.
- inspeccionar cada bloque, en la cuadrícula dimensionada por bloque de NxN, con centro en el bloque en la ventana
o núcleo situado en x, y la acumulación de la diferencia vectorial de movimiento de trayectoria hacia adelante y hacia atrás en la memoria tampón Dbuf. Db (xu + n) = f Dbuf (x + n) + IVT (x + n) -vt 1 (xf + n) i para la diferencia de trayectoria hacia adelante y Dbuf (x + n) = Dbuf (x + n) + IVT (x + n) -vt-1 (xb + n) i para la diferencia de trayectoria hacia atrás, Siendo n un vector de desplazamiento para llegar a cada uno de los bloques en la ventana / núcleo.
FIGURA 1-a
FIGURA 1-b
FIGURA 2-a
FIGURA 2-b
FIGURA 3-a
FIGURA 3-b
REFERENCIAS CITADAS EN LA DESCRIPCIÓN
La lista de referencias citada por el solicitante lo es solamente para utilidad del lector, no formando parte de los documentos de patente europeos. Aún cuando las referencias han sido cuidadosamente recopiladas, no pueden excluirse errores u omisiones y la OEP rechaza toda responsabilidad a este respecto.
Documentos de patente citados en la descripción • WO 2008091205 A1 [0003] • US 20020085096 A1 [0004]
Patentes similares o relacionadas:
Desplazamiento de inhibición de un dispositivo recargable inalámbricamente, del 26 de Febrero de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para inhibir el desplazamiento de un dispositivo recargable inalámbricamente posicionado en una superficie de carga subyacente […]
Sistemas y métodos de seguimiento de objetos asociativos, del 8 de Enero de 2020, de Isolynx, LLC: Un aparato de seguimiento asociativo para seguir un primer objeto (402 , 1206) usando información de seguimiento para el primer objeto (402 , 1206) e información […]
Procedimiento de estimación de flujo óptico a partir de un sensor de luz asíncrono, del 18 de Diciembre de 2019, de Sorbonne Université: Procedimiento de estimación de flujo óptico, que comprende: - recibir información asíncrona proveniente de un sensor de luz que tiene una matriz de píxeles dispuestos […]
Metrología en vivo de un objeto durante la fabricación u otras operaciones, del 21 de Agosto de 2019, de THE BOEING COMPANY: Un método para metrología en vivo de un objeto, que comprende: realizar una operación de escaneado mediante una pluralidad de sensores para […]
Procedimiento y dispositivo para la detección de objetos en movimiento en una secuencia de imágenes de vídeo, del 19 de Junio de 2019, de Airbus Defence and Space GmbH: Procedimiento para la detección de objetos en movimiento en una secuencia de imágenes de vídeo que comprende los pasos de: a) determinación de […]
Método y sistema para generar una representación 3D en una escena 3D dinámicamente cambiante, del 13 de Mayo de 2019, de VIZRT AG: Método para llenar los huecos que quedan en el fondo de una imagen después de recortar los objetos del fondo, que comprende las etapas […]
Sistema y método para medir el flujo del tráfico de un área, del 26 de Abril de 2019, de CUENDE INFOMETRICS, S.A.: Un sistema para estimar el flujo del tráfico real de un área, comprendiendo el sistema : • imágenes aéreas de un área tomadas a intervalos […]
Método implementado por ordenador y sistema para procesamiento de video con consistencia en el tiempo, del 15 de Abril de 2019, de RATIONAL PIXELS S.L: Un metodo implementado por ordenador para editar una secuencia de video con consistencia en el tiempo que comprende las etapas de: i) calcular un campo de movimiento […]