Procedimiento para la determinación de la posición angular absoluta del volante de un vehículo.
Procedimiento para la determinación absoluta de un ángulo de giro,
en particular de la posición angular del volante de un vehículo por medio de una unidad de envío y recepción que comprende una fuente de luz y una red de sensores que presenta una pluralidad de elementos transductores optoelectrónicos, así como un soporte de código dispuesto de manera giratoria con respecto a la misma, que presenta una codificación inequívoca de pista única de los valores angulares, reproduciéndose un segmento continuo de la codificación en la red de sensores, y evaluándose la señal de salida de la red de sensores para determinar una palabra de código correspondiente al valor angular actual, caracterizado porque la señal de salida de la red de sensores para la reconstrucción del segmento representado de la pista de código se somete en un primer filtro de correlación a una operación de convolución con una señal de referencia, el segmento representado determinado de la pista de código se convierte en un mapa de bits que representa al mismo, el mapa de bits se somete en un segundo filtro de correlación a una operación de convolución con un mapa de bits de referencia que representa toda la información de ángulo de la pista de código, y porque se determina la posición de la mayor coincidencia del mapa de bits con el mapa de bits de referencia como palabra de código actual.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06014317.
Solicitante: LEOPOLD KOSTAL GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: WIESENSTRASSE 47 58507 LÜDENSCHEID ALEMANIA.
Inventor/es: KOSTER,MICHAEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
- G01D5/249 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › utilizando código de pulsos.
- G01D5/347 G01D 5/00 […] › que utilizan escalas de codificación de desplazamiento.
PDF original: ES-2382045_T3.pdf
Fragmento de la descripción:
Procedimiento para la determinación de la posición angular absoluta del volante de un vehículo La invención se refiere a un procedimiento para la determinación absoluta de un ángulo de giro, en particular de la posición angular del volante de un vehículo por medio de una unidad de envío y recepción que comprende una fuente de luz y una red de sensores que presenta una pluralidad de elementos transductores optoelectrónicos, así como un soporte de código dispuesto de manera giratoria con respecto a la misma, que presenta una codificación inequívoca de pista única de los valores angulares, reproduciéndose un segmento continuo de la codificación en la red de sensores, y evaluándose la señal de salida de la red de sensores para determinar una palabra de código correspondiente al valor angular actual.
La posición angular absoluta del volante, también designada como ángulo de dirección, se requiere en los vehículos para poder solicitar con este valor por ejemplo un sistema de regulación de la dinámica de conducción. Un sistema de regulación de la dinámica de conducción de este tipo obtiene, además de dicho valor de ángulo de dirección, datos de medición adicionales, por ejemplo la velocidad de giro de una rueda o el giro del vehículo con respecto a su eje vertical. Se requieren por un lado la oblicuidad absoluta del ángulo de dirección y por otro lado la velocidad de dirección, para poder evaluar mediante el sistema de regulación de la dinámica de conducción estos valores junto con los otros datos registrados y convertirlos para controlar actuadores, por ejemplo, los frenos y/o la gestión de motor.
Por el documento DE 40 22 837 A1 se conoce un sensor de ángulo de dirección optoelectrónico adecuado para realizar un procedimiento de este tipo. El sensor angular de volante descrito en este documento comprende una unidad de control electrónica así como una unidad de sensor, compuesta por dos elementos dispuestos en paralelo y con separación entre sí - una fuente de luz y un sensor de líneas - así como un disco de código dispuesto entre la fuente de luz y el sensor de líneas, que está unido de manera resistente al giro con el husillo de dirección. Como sensor de líneas sirve una línea de sensor CCD. Como codificación está prevista en este disco de código una espiral de Arquímedes que se extiende a lo largo de 360º, configurada como ranura de luz. A través de la iluminación de los correspondientes elementos transductores del sensor de líneas con una determinada oblicuidad de dirección puede obtenerse información sobre la posición de ángulo de dirección real. La espiral de Arquímedes utilizada como codificación está configurada de manera que discurre con continuidad, de modo que ésta puede designarse como codificación analógica. Sin embargo, con la misma disposición puede leerse también igual de bien una codificación digital en el disco de código.
Por el documento DE 197 58 104 A1 se conoce un procedimiento para la determinación absoluta de un ángulo de giro según el preámbulo de la reivindicación 1. En este procedimiento previamente conocido la señal de salida de la red de sensores se transforma mediante la evaluación de modificaciones de señal precisas, denominadas en general también flancos, en una diferencia de contraste. Las diferencias de contraste se decodifican por medio de un microcontrolador, al compararse con un patrón en blanco y negro que representa la información de ángulo.
Si bien este procedimiento previamente conocido puede solucionar básicamente el objetivo de determinar el valor angular buscado, sin embargo reacciona con mucha sensibilidad a todo tipo de perturbaciones de señal. Así por ejemplo el ensuciamiento del sistema óptico puede provocar proyecciones de sombras adicionales, que se expresan igualmente como flancos en la señal de salida eléctrica y con ello provocan diferencias de contraste adicionales, no correspondientes a la codificación. En particular en la utilización en el automóvil aparecen también perturbaciones electromagnéticas, que provocan flancos adicionales en la señal de salida de la red de sensores. Dado que el procedimiento de evaluación se basa no obstante precisamente en el reconocimiento y evaluación de tales flancos o de las diferencias de contraste derivadas de éstos, tales impulsos parásitos llevan a correspondientes mediciones incorrectas. Si bien las mediciones incorrectas de este tipo pueden reconocerse por medio de procesos configurados correspondientemente para comprobar la validez de los resultados de medición que resultan de las mismas, si embargo no es posible la corrección de estos resultados de medición.
Partiendo de este estado de la técnica comentado, la invención se basa por tanto en el objetivo de perfeccionar un procedimiento del tipo mencionado al principio de tal manera que se consiga una insensibilidad claramente elevada frente a influencias externas en particular por ensuciamiento o impulsos parásitos electromagnéticos.
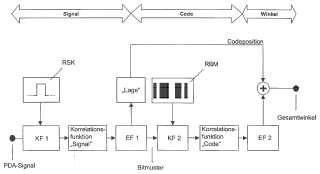
Este objetivo se soluciona según la invención, sometiendo la señal de salida de la red de sensores, para la reconstrucción del segmento representado de la pista de código, en un primer filtro de correlación a una operación de convolución con una señal de referencia, convirtiendo el segmento representado determinado de la pista de código en un mapa de bits que representa al mismo, sometiendo en un segundo filtro de correlación el mapa de bits a una operación de convolución con un mapa de bits de referencia que representa toda la información de ángulo de la pista de código, y determinando la posición de la mayor coincidencia del mapa de bits con el mapa de bits de referencia como palabra de código actual.
Ventajosamente la señal de referencia representa una sección corta de una señal de código idealizada.
La evaluación se vuelve especialmente segura al formarse en el primer filtro de correlación a partir de la señal de salida de la red de sensores y de la señal de referencia una primera función de correlación, cuyos valores extremos reflejan la ubicación de las transiciones claro-oscuro de la señal de código. Estos valores extremos de la función de correlación se comparan entonces en un primer filtro de decisión con valores umbral de correlación definidos, y sólo en el caso de superar o quedar por debajo del correspondiente valor umbral de correlación se detecta la existencia de una transición claro-oscuro de la señal de código.
De manera especialmente preferible como resultado de la operación de convolución del mapa de bits con el mapa de bits de referencia se forma una segunda función de correlación, cuyo máximo absoluto indica la posición de la mayor coincidencia del mapa de bits con el mapa de bits de referencia.
Una mejora adicional de la seguridad se consigue al compararse el máximo absoluto de la segunda función de correlación en un segundo filtro de decisión con un valor umbral de correlación definido, y sólo en caso de que el valor máximo de la función de correlación supere el valor umbral de correlación se marca el valor angular como válido.
Configuraciones y ventajas adicionales de la invención forman parte de las reivindicaciones dependientes adicionales así como de la siguiente descripción de un ejemplo de realización haciendo referencia a la única figura adjunta, que muestra un diagrama de bloques del desarrollo del procedimiento.
En el presente ejemplo de realización se parte de una disposición de sensor de ángulo, en la que un soporte de código, que presenta una pista de código que representa una codificación digital de los valores angulares, está montado de manera giratoria con respecto a una unidad de envío y recepción optoelectrónica. La pista de código representa a este respecto una codificación inequívoca de los valores angulares de desde 0º hasta 360º, y el receptor de la unidad de envío y recepción se forma por un sensor de líneas formado a partir de una pluralidad de fotodiodos, una denominada red de fotodiodos (PDA) . En el presente ejemplo se emplea una PDA, que presenta 128 fotodiodos individuales, también denominados píxeles. Esta PDA se ilumina mediante el emisor de luz asociado a la misma, por ejemplo un diodo emisor de luz (LED) , pasando por el soporte de código que contiene la codificación. La codificación está realizada a este respecto, por ejemplo, por una sucesión de aberturas transparentes en el soporte de código compuesto por un material opaco. En el caso de una transiluminación radial de esta codificación ésta está realizada como una pista circundante sobre una superficie... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la determinación absoluta de un ángulo de giro, en particular de la posición angular del volante de un vehículo por medio de una unidad de envío y recepción que comprende una fuente de luz y una red de sensores que presenta una pluralidad de elementos transductores optoelectrónicos, así como un soporte de código dispuesto de manera giratoria con respecto a la misma, que presenta una codificación inequívoca de pista única de los valores angulares, reproduciéndose un segmento continuo de la codificación en la red de sensores, y evaluándose la señal de salida de la red de sensores para determinar una palabra de código correspondiente al valor angular actual, caracterizado porque la señal de salida de la red de sensores para la reconstrucción del segmento representado de la pista de código se somete en un primer filtro de correlación a una operación de convolución con una señal de referencia, el segmento representado determinado de la pista de código se convierte en un mapa de bits que representa al mismo, el mapa de bits se somete en un segundo filtro de correlación a una operación de convolución con un mapa de bits de referencia que representa toda la información de ángulo de la pista de código, y porque se determina la posición de la mayor coincidencia del mapa de bits con el mapa de bits de referencia como palabra de código actual.
2. Procedimiento según la reivindicación 1, caracterizado porque la señal de referencia representa una sección corta de una señal de código idealizada.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque en el primer filtro de correlación a partir de la señal de salida y de la señal de referencia se forma una primera función de correlación, cuyos valores extremos reflejan la ubicación de las transiciones claro-oscuro de la señal de código.
4. Procedimiento según la reivindicación 3, caracterizado porque los valores extremos de la primera función de correlación se comparan en un primer filtro de decisión con valores umbral de correlación definidos, y sólo en el caso de superar o quedar por debajo del correspondiente valor umbral de correlación se detecta la existencia de una transición claro-oscuro de la señal de código.
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado porque en el segundo filtro de correlación, a partir del mapa de bits con el mapa de bits de referencia se forma una segunda función de correlación, cuyo máximo absoluto indica la posición de la mayor coincidencia del mapa de bits con el mapa de bits de referencia.
6. Procedimiento según la reivindicación 5, caracterizado porque el máximo absoluto de la segunda función de correlación se compara en un segundo filtro de decisión con un valor umbral de correlación definido, y sólo en caso de que el valor máximo de la función de correlación supere el valor umbral de correlación se marca el valor angular como válido.
Patentes similares o relacionadas:
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Sistemas y método de ayuda a la conducción de vehículos, del 19 de Febrero de 2020, de Siemens Mobility S.A.S: Sistema de ayuda a la conduccion de un vehiculo , dicho sistema comprende: un dispositivo de determinacion de trayectoria capaz de determinar una trayectoria para […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Dispositivo de asistencia para maniobras de atraque en una dársena, del 16 de Octubre de 2019, de NEWTL (Société par Actions Simplifiée): Vehículo de carretera que incluye ruedas delanteras montadas en un eje de dirección delantero y ruedas traseras montadas en un eje trasero […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Sistema de asistencia al conductor, del 11 de Junio de 2019, de ROBERT BOSCH GMBH: Sistema de asistencia al conductor para vehículos a motor, que comprende: - un regulador de guiado longitudinal , el cual está configurado […]
 Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor, sistema de asistencia al conductor así como vehículo de motor, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor , en el que se establece una posición relativa entre el vehículo de motor […]
Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor, sistema de asistencia al conductor así como vehículo de motor, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor , en el que se establece una posición relativa entre el vehículo de motor […]