Procedimiento de detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor y vehículo de motor.
Procedimiento para la detección de perturbaciones del proceso de medición de una disposición (2) de medición con ultrasonido de un vehículo (1) de motor con velocidades a partir de 50 km/h,
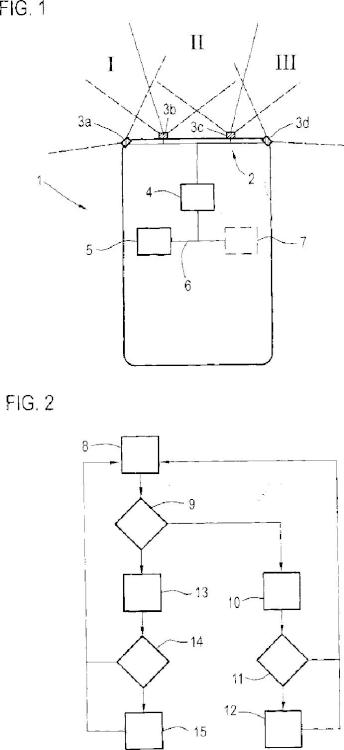
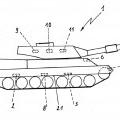
comprendiendo la disposición (2) de medición con ultrasonido, que comprende al menos un sensor ( 3a, 3b, 3c, 3d) de ultrasonido, como datos de partida al menos el radio, que describe la separación del objeto más próximo situado en el campo de medición de un sensor (3a, 3b, 3c, 3d) utilizado para la medición del radio, caracterizado porque se determina una perturbación del proceso de medición en función de al menos una comparación del radio con un radio mínimo dependiente de la velocidad, aumentando el radio mínimo con la velocidad.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11002668.
Solicitante: AUDI AG.
Nacionalidad solicitante: Alemania.
Dirección: 85045 INGOLSTADT ALEMANIA.
Inventor/es: LIMBACHER,REIMUND, DRIEMECKER,MATTHIAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/93 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para anticolisión.
- G01S15/87 G01S […] › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › Combinaciones de sistemas de sonar.
- G01S15/93 G01S 15/00 […] › como anti-colisión.
- G01S7/52 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › de sistemas de acuerdo con el grupo G01S 15/00.
PDF original: ES-2509090_T3.pdf
Fragmento de la descripción:
Procedimiento de detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor y vehículo de motor
El invento se refiere a un procedimiento para la detección de perturbaciones del funcionamiento de medición de una disposición de medición con ultrasonido de un vehículo con velocidades altas, en especial velocidades a partir de 50 km/h, comprendiendo la disposición de medición al menos un sensor de ultrasonido, que utiliza como datos de partida al menos el radio, que describe la distancia al objeto más próximo, que se halle en el campo de medición de un sensor utilizado para la medición del radio. Además, el invento se refiere a un vehículo correspondiente.
Los sensores de ultrasonido, que miden la separación a los objetos, que se hallan en el entorno del vehículo por emisión y recepción de ultrasonido son conocidos en la actualidad y se utilizan en la mayoría de los casos en los sistemas de asistencia al conductor. Un ejemplo prominente de ello son las conocidas ayudas de aparcamiento a las que puede estar asociada una disposición de medición con al menos un sensor de ultrasonido. Estos "sensores de aparcamiento" son utilizados con velocidades bajas durante un proceso de aparcamiento, pudiendo proceder los radios generados de una medición con un, pero también con dos sensores de ultrasonido, cuando la señal emitida por un sensor de ultrasonido es recibida por otro sensor de ultrasonido.
Las disposiciones de medición con ultrasonido de las ayudas de aparcamiento están concebidas para su utilización correspondiente, de manera concreta para su utilización con velocidades bajas, por ejemplo en el margen inferior a 30 km/h. En un aparato de mando se pueden prever algoritmos para la detección de perturbaciones. Estas pueden resultar por ejemplo de sonidos perturbadores, que pueden ser generados por los equipos de aire a presión de los camiones, por los ruidos de frenado o por el ultrasonido de otros vehículos.
Recientemente entró en consideración aprovechar los resultados de la medición de las disposiciones de medición con ultrasonido para otros sistemas de vehículos, en especial otros sistemas de asistencia al conductor. Así por ejemplo, los radios generados por una disposición de medición con ultrasonido podrían ser utilizados en el marco de los sistema de alarma de abandono de la trazada, respectivamente los sistemas de mantenimiento de la trazada, con los que se detectan las barreras de protección o por ejemplo vehículos de motor próximos al vehículo de motor como objetos por medio de la disposición de medición con ultrasonido. En este caso también se pueden tener en cuenta, por ejemplo los sensores de radar.
Sin embargo, se comprobó, qué con velocidades altas, en especial con velocidades a partir de 50 km/h, son responsables de una perturbación de los sensores de ultrasonido de la disposición de medición con ultrasonido efectos totalmente distintos. Así por ejemplo, se comprobó, que con condiciones meteorológicas adversas, como por ejemplo lluvia, se pueden producir con mayor facilidad las perturbaciones de la medición con ultrasonido. Esto puede estar relacionado en el caso de lluvia por la niebla producida por los vehículos de motor, que en última instancia se sitúa como un "muro" delante de los sensores de ultrasonido y genera radios falsos como resultados de las mediciones. Igualmente se pueden producir perturbaciones debidas al aire de circulación con velocidades altas (aproximadamente >150 km/h).
Los radios generados por la disposición de medición con ultrasonido tienen que ser clasificados por ello en la actualidad como no fiables, ya que no es posible estimar si los valores recibidos son valores plausibles o si los sensores reaccionan a factores de perturbación.
El documento DE 198 32 800 A1 se refiere a un sistema de detección de obstáculos para un vehículo de motor, que comprende un radar para medir la separación de un objetivo existente dentro de un campo de medición. En él se debe determinar una reducción de la capacidad de medir la separación del objetivo por medio de la comparación con un valor de referencia prefijado. El sistema se refiere a un dispositivo de radar y se menciona, que en lugar de un rayo láser se puede utilizar una onda de radio o una onda de ultrasonido.
El documento US 2008/0172156 se refiere a un procedimiento y a un sistema para predecir el tiempo y la velocidad de impacto. Se utiliza un filtro recursivo para la evaluación de los datos del sensor, que predice el movimiento relativo del objeto de diana con relación al vehículo propio. Sin embargo, si el objeto de diana se halla más cerca del vehículo de motor que un valor umbral de separación, no se siguen utilizando los valores del sensor.
El invento se basa por ello en el problema de divulgar un procedimiento con el que se puedan detectar de manera fiable las perturbaciones del proceso de la medición de una disposición de medición con ultrasonido precisamente con velocidades altas.
Para la solución de este problema se propone según el invento en un procedimiento de la clase mencionada más arriba, que una perturbación del proceso de medición se determine en función de al menos una comparación del radio con un radio mínimo dependiente de la velocidad, aumentando el radio mínimo con la velocidad.
Por lo tanto, se propone, que los radios suministrados por la disposición de medición con ultrasonido, que puede estar asociada con una ayuda de aparcamiento, se analicen desde el punto de vista de su plausibilidad por medio de un radio mínimo. Precisamente con velocidades altas sucede de manera forzosa, que determinados radios, es decir
determinadas separaciones con relación a objetos, no son plausibles en el correspondiente modo de marcha. Si se obtienen radios medidos, que se hallen por debajo del radio mínimo se puede partir del hecho de que probablemente haya una perturbación, lo que significa, que el rebasamiento por abajo del radio mínimo es un indicio en la detección de una perturbación y por consiguiente es tenido en cuenta en el marco del presente invento para basar en él la detección de una perturbación. Dado que de manera típica las señales de ultrasonido perturbadas se producen de una manera estocásticamente irregular, un solo rebasamiento por arriba no conduce en las dos ejecuciones del presente invento a la detección de una perturbación, extremo en el que se insistirá en lo que sigue con más detalle.
Por lo tanto, el presente invento hace posible la identificación de la utilidad de las señales, es decir de los radios suministrado por la disposición de medición con ultrasonido, a partir del propio comportamiento de la señal, sin la utilización de un sistema de sensores adicional, de manera, que se obtiene un procedimiento barato y eficaz.
Si se detecta una perturbación, se puede prever por ejemplo, que los radios suministrados por la disposición de medición con ultrasonido no sean utilizados por los demás sistemas del vehículo mientras persista la perturbación.
Si son suministrados varios radios como datos de partida, se puede prever, que a radios distintos se asignen distintos radios mínimos. Esto se puede hacer depender por ejemplo de la dirección en la que se mide el radio, ya que , por ejemplo, en un vehículo surgen con frecuencia lateralmente separaciones más pequeñas que frontalmente. Además de una dependencia eventualmente creada de la velocidad, también se puede prever, que se elijan también en este caso límites de plausibilidad en función del sensor concreto o del margen.
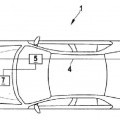
En este caso se puede prever convenientemente, que los diferentes radios se asignen a varios grupos, en especial dependientes del lugar, en especial grupos asignados a los costados del vehículo de motor y/o un grupo asignado al lado frontal del vehículo de motor y/o un grupo asignado a las parte trasera del vehículo de motor, determinando por separado una perturbación del proceso de medición para cada uno de los grupos, que posean un radio mínimo asignado. Por lo tanto, los radios registrados por la disposición de medición con ultrasonido son agrupados en varios márgenes, por ejemplo "izquierda", "derecha", "delante", de manera, que de esta manera se puede evitar por ejemplo, que un sensor sensible a perturbaciones no montado por ejemplo de manera estable, marque como perturbados todas las posibles vías de señal. Obviamente también se puede prever, que los grupos comprendan siempre un sensor. En relación con la ya mencionada asignación de radios distintos, se puede prever por lo demás, que al menos a dos grupos se asigne un radio mínimo distinto. Obviamente también es posible, que dos grupos posean el mismo radio mínimo... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la detección de perturbaciones del proceso de medición de una disposición (2) de medición con ultrasonido de un vehículo (1) de motor con velocidades a partir de 50 km/h, comprendiendo la disposición (2) de medición con ultrasonido, que comprende al menos un sensor ( 3a, 3b, 3c, 3d) de ultrasonido, como datos de partida al menos el radio, que describe la separación del objeto más próximo situado en el campo de medición de un sensor (3a, 3b, 3c, 3d) utilizado para la medición del radio, caracterizado porque se determina una perturbación del proceso de medición en función de al menos una comparación del radio con un radio mínimo dependiente de la velocidad, aumentando el radio mínimo con la velocidad.
2. Procedimiento según la reivindicación 1, caracterizado porque en el caso de que se suministren como datos de partida varios radios se asignan a los radios distintos radios mínimos distintos.
3. Procedimiento según la reivindicación 2, caracterizado porque los varios radios se asignan a varios grupos (I, II, III) en especial dependientes del lugar, en especial a grupos (I, III) asignados a los costados del vehículo (1) de motor y/o a un grupo (II) asignado al lado frontal del vehículo (1) de motor y/o a un grupo asignado a la parte trasera del vehículo (1) de motor, determinando por separado una perturbación del proceso de medición para cada grupo (I, II, III), que posea un radio mínimo asignado a él.
4. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque el radio mínimo aumenta linealmente con la velocidad.
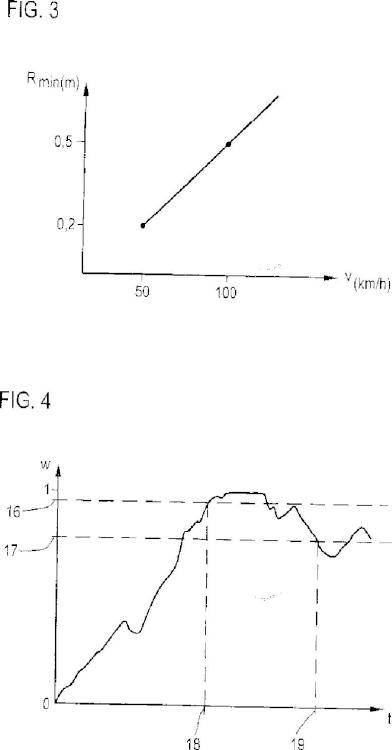
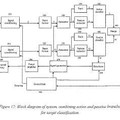
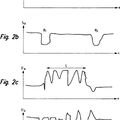
5. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque se utiliza un valor de probabilidad de perturbación, que es incrementado en el caso de que una comparación de lugar a un radio menor que el radio mínimo y que es reducido para todo radio para cada radio, que rebase por arriba o acepte el radio mínimo.
6. Procedimiento según la reivindicación 5, caracterizado porque al rebasar por arriba un primer valor (16) límite del valor de probabilidad de perturbación se detecta una perturbación y que al rebasar por abajo un segundo valor (17) límite con el valor de probabilidad de perturbación se detecta como finalizada la perturbación.
7. Procedimiento según la reivindicación 5 ó 6, caracterizado porque al considerar una pluralidad de radios, el incremento del valor de probabilidad de perturbación depende de la cantidad de los radios, que en la comparación rebasen por abajo en especial el radio mínimo asignado al radio correspondiente.
8. Procedimiento según una de las reivindicaciones 5 a 7, caracterizado porque para el valor del incremento o de la reducción del valor de probabilidad de perturbación se tienen en cuenta otros datos, en especial referidos a datos climáticos y/o ambientales, en especial la actividad de un limpiaparabrisas y/o los datos de un sensor de lluvia y/o la temperatura exterior.
9. Vehículo (1) de motor, que comprende una disposición (2) de medición con al menos un sensor (3a, 3b, 3c 3d) de ultrasonido y un aparato (4) de mando configurado para la realización del procedimiento según una de las reivindicaciones precedentes.
Patentes similares o relacionadas:
Sistema y procedimiento para la detección de blancos, del 23 de Noviembre de 2018, de Universiteit Antwerpen: Un sensor basado en sónar adaptado para la localización de un blanco en el aire, el sensor que comprende: - un emisor de banda ancha o ultraancha que emite […]
Arquitectura de un sistema multiestático acústico, del 28 de Diciembre de 2016, de THALES: Sistema acústico que consta al menos de una base emisora que consta de unos medios de emisión de un pulso sonar y de al menos […]
 Sistema acústico y con soporte táctil de información a los ocupantes del vehículo, del 20 de Agosto de 2014, de RHEINMETALL LANDSYSTEME GMBH: Sistema acústico de información a los ocupantes del vehículo para la supervisión de un entorno exterior del vehículo, en particular para vehículos […]
Sistema acústico y con soporte táctil de información a los ocupantes del vehículo, del 20 de Agosto de 2014, de RHEINMETALL LANDSYSTEME GMBH: Sistema acústico de información a los ocupantes del vehículo para la supervisión de un entorno exterior del vehículo, en particular para vehículos […]
 Procedimiento y aparato para la detección y clasificación de un objeto que se encuentra en el agua, del 15 de Marzo de 2013, de Kongsberg Defence & Aerospace AS: Aparato con modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido apartir de una señal pasiva generada por el objeto y […]
Procedimiento y aparato para la detección y clasificación de un objeto que se encuentra en el agua, del 15 de Marzo de 2013, de Kongsberg Defence & Aerospace AS: Aparato con modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido apartir de una señal pasiva generada por el objeto y […]
MÉTODO PARA CARACTERIZAR EL TRÁFICO RODADO, del 22 de Marzo de 2012, de UNIVERSIDAD CARLOS III DE MADRID: La presente invención está dirigida a un método que permite caracterizar el tráfico rodado a lo largo de una vía de circulación que contiene […]
 DISPOSITIVO PARA DETECTAR UN OBJETO MÓVIL, del 6 de Mayo de 2011, de ROBERT BOSCH GMBH: Dispositivo para un vehículo de motor con al menos un sensor de ultrasonidos para detectar un objeto móvil, en especial un vehículo que se aproxima, […]
DISPOSITIVO PARA DETECTAR UN OBJETO MÓVIL, del 6 de Mayo de 2011, de ROBERT BOSCH GMBH: Dispositivo para un vehículo de motor con al menos un sensor de ultrasonidos para detectar un objeto móvil, en especial un vehículo que se aproxima, […]
 PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE, del 28 de Mayo de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos […]
PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE, del 28 de Mayo de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos […]
 SISTEMA Y PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA POSICIÓN DE OBJETOS, del 5 de Abril de 2011, de SONITOR TECHNOLOGIES AS: Unidad de transmisión para su utilización en un sistema para determinar la posición de objetos a los que están fijadas las unidades de transmisión […]
SISTEMA Y PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA POSICIÓN DE OBJETOS, del 5 de Abril de 2011, de SONITOR TECHNOLOGIES AS: Unidad de transmisión para su utilización en un sistema para determinar la posición de objetos a los que están fijadas las unidades de transmisión […]