Procedimiento de detección de un objeto en una escena que comprende artefactos.
Procedimiento para la detección de un objeto en una escena situada en un sector angular determinado,
y susceptible de comprender uno o varios artefactos, que comprende una etapa de barrido del sector cuya anchura angular A se barre a una velocidad angular θ', una etapa de adquisición de imágenes digitales de la escena a una velocidad f por medio de un detector matricial, estas imágenes constando de unos píxeles y que cubren un campo de anchura angular instantánea "a", que comprende las siguientes etapas de tratamiento de las imágenes adquiridas, por lote de N imágenes consecutivas con N = afl θ
- distribuir las N imágenes en P grupos de imágenes, P siendo un entero superior a 1;
- para cada grupo p, p comprendido entre 1 y P, acumular las imágenes del grupo de tal modo que se obtenga una imagen acumulada Ip;
- para cada imagen Ip, seleccionar los píxeles que verifican un criterio de detección determinado,
y caracterizado porque comprende la siguiente etapa:
- para cada imagen Ip comprende al menos un píxel seleccionado, denominada imagen original de confirmación, realizar una etapa de confirmación temporal que comprende las siguientes sub-etapas:
aplicar un criterio de confirmación temporal comparando un número predeterminado K (tenemos que K
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/056908.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY-SUR-SEINE FRANCIA.
Inventor/es: PRENAT,Michel, DUFOUR,Jean-Yves, LEMPERIERE,Nadège.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S3/786 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › manteniéndose el estado deseado automáticamente.
- G06T7/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
PDF original: ES-2381987_T3.pdf
Fragmento de la descripción:
Procedimiento de detección de un objeto en una escena que comprende artefactos.
El campo de la invención es el de los sistemas optrónicos de vigilancia.
Un sistema optrónico de vigilancia tiene como función detectar y seguir unos blancos que penetran en una zona de vigilancia.
El problema crucial de la detección de blanco (u objeto) en una secuencia de vídeo es encontrar un criterio designado « criterio de detección » que permita decidir para cada imagen comprende unos píxeles, cuáles son los píxeles de un blanco. La elección de este criterio conduce a unos resultados de detección definidos en función de la relación probabilidad de detección - probabilidad de falsa alarma.
Se recuerda que la probabilidad de detección es la probabilidad para un píxel de un blanco (u objeto amenazante) de que se le considere de manera probable el de un blanco; la probabilidad de falsa alarma es la probabilidad para un píxel de un objeto no amenazante de que se seleccione considerándolo de manera probable el de un blanco.
En los sistemas de vigilancia de blancos aéreos, se utilizan de manera general unas imágenes adquiridas en las longitudes de onda de infrarrojos ya que estas ofrecen un buen criterio de detección en la medida en que la mayor parte de los blancos están propulsados y proporcionan, por lo tanto, una señal IR elevada.
Para un sistema de vigilancia aire-aire de largo alcance, la detección consiste en discriminar con una alta probabilidad de detección y una baja probabilidad de falsa alarma, un píxel que puede presentar una baja relación señal-ruido (RSB) , como un píxel cuya señal « blanco » es baja comparada con las señales de los píxeles de posterior plano.
Las principales fuentes de falsas alarmas son:
las muestras de ruido en los píxeles del posterior plano del blanco que producen una señal adicional comparable en determinados casos al de un blanco; los artefactos que varían rápidamente en el posterior plano, que producen una señal muy importante (reflejos del sol en el borde de las nubes, por ejemplo) .
Los sistemas considerados son, de manera más particular, los sistemas de vigilancia con se barre a baja frecuencia que funcionan con un dispositivo de adquisición de alta frecuencia. Entre estos se pueden citar los sistemas que se describen en el documento GB 2330028 que presenta un sistema de identificación de la trayectoria de un blanco en unas imágenes parásitas y en el documento US 5210798 que presenta un sistema de detección de un blanco con una baja RSB.
La figura 1 ilustra un ejemplo de sistema de vigilancia concido, comprende unos medios de barrido que permiten analizar, de preferencia de forma repetitiva, un sector S del espacio. Este sistema comprende una óptica frontal 1 de campo instantáneo « a x b » y unos medios de barrido 2 que permiten la observación del sector S con un campo total dado « A x B ». Los medios de barrido están controlados por una unidad de tratamiento, que permite la exploración del sector. El sistema de vigilancia comprende, además, unos medios de formación de imagen 3 en los píxeles del detector matricial 41 que está comprendido en unos medios de detección 4. Se trata de la imagen de una escena situada en una región de campo dada « a x b », situado en el sector S. El sistema puede comprender también unos medios de contra-barrido 6 que permiten compensar los movimientos de la imagen causados por el barrido de la escena durante la adquisición de las imágenes. Por ejemplo, la unidad de tratamiento 5 puede sincronizar la adquisición de las imágenes con el barrido mediante unos medios de contra-barrido.
En estos sistemas, el detector matricial 41 cubre una banda del espacio (de dimensión « A x b ») mediante el giro de los medios de barrido 2. En ese caso, un punto del sector S no se observa de forma permanente, sino con un periodo más o menos corto según el tiempo que le lleva volver a este punto después de haber explorado el conjunto del sector S. Los medios de contra-barrido 6 permiten: por una parte, garantizar la estabilidad de la línea de visión durante el tiempo de integración del detector matricial 41 para cada imagen, por otra parte, observar la misma región « a x b » del espacio (con una dimensión prácticamente igual al campo instantáneo del detector matricial 41, o eventualmente inferior a este) mientras los medios de barrido 2 del sector no precisen el paso a la zona siguiente. En general, los medios de barrido / contra-barrido 2, 6 garantizan un cierto solapamiento entre dos zonas consecutivas observadas, para eliminar el riesgo de formación de zonas ‘ciegas' causadas por fallos en los mecanismos, y para tratar sin una dificultad añadida el caso de los blancos que se desplazan por la marca del detector matricial.
Según la frecuencia de adquisición de las imágenes y la velocidad de giro de los medios de barrido, se obtiene por lo tanto un determinado número de imágenes de la misma zona (con la misma dirección de visión) .
Estos sistemas de vigilancia se caracterizan por:
un intervalo importante (que puede llegar a ser de varios segundos) entre dos observaciones consecutivas de la misma zona en dos análisis sucesivos del sector S; un gran número N (del orden de varias decenas) de adquisiciones de imágenes del mismo objeto (o blanco) de una escena en cada barrido: N imágenes consecutivas incluyen, por lo tanto, el mismo objeto.
En la figura 2 se ilustra este procedimiento con los siguientes valores:
El sector S de un campo representado por un ángulo A x B barridoen su anchura A en T segundos, esto es a una velocidad angular 8', por ejemplo 20º en 2 s, esto es 8' = AfT = 10º s-1.
Si a es la anchura angular del campo instantáneo del detector matricial; el tiempo dedicado a la adquisición de las imágenes de una escena que cubre una anchura angular « a » es igual al tiempo necesario para explorar esta anchura a la velocidad angular 8', esto es t = a f 8', por ejemplo para a = 1º y8' = 10º s-1, t = 0, 1 s.
El término anchura angular no se limita a una orientación en el espacio.
Si f es la cadencia de muestreo del detector matricial (cadencia de image) , por ejemplo f = 400 Hz, tenemos un periodo de muestreo te = 1ff = 2, 5 ms.
Entonces el número N de imagenes dedicadas a la misma zona angular es igual a N = t f te = a f f 8', esto es N = 40.
En la figura, y para no sobrecargarla, un objeto puntual O está presente por lo tanto en 40 imágenes consecutivas, numeradas de n a n+39. Este objeto no está presente en las 40 imágenes anteriores (numeradas de n-40 a n-1) ni en las 40 imágenes siguientes (numeradas de n+40 a n+79) .
El problema es optimizar el uso de estas N imágenes para detectar el objeto con una fuerte probabilidad de detección y eliminar en la medida de lo posible las falsas alarmas causadas, en particular, por artefactos.
La invención tiene por objeto un procedimiento de detección de un objeto en una escena situada en un sector angular S determinado, y susceptible de comprender uno o varios artefactos (señales del posterior plano de gran amplitud y que varían rápidamente) , que comprende una etapa de barrido del sector en su anchura angular A a una velocidad angular 8', una etapa de adquisición de imágenes digitales consecutivas de la escena en una frecuencia f, estas imágenes constando de unos píxeles y que cubren un campo ‘instantáneo' de anchura angular « a ». Se caracteriza principalmente porque comprende las siguientes etapas de tratamiento de las imágenes adquiridas, por lote de N imagenes con N = a f f 8':
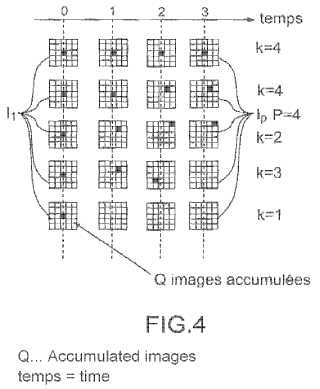
distribuir las N imágenes en P grupos de imágenes, P siendo un entero superior a 1; para cada grupo p, p comprendido entre 1 y P, acumular las imágenes del grupo de tal modo que se obtenga una imagen acumulada Ip que incluye el píxel objeto; para cada imagen Ip, seleccionar los píxeles que verifican un criterio de detección determinado, para cada imagen Ip comprende al menos un píxel seleccionado, denominada imagen original de confirmación, realizar una etapa de confirmación temporal que comprende las siguientes sub-etapas:
aplicar un criterio de confirmación temporal comparando un número predeterminado K con K <= P, con el número k de veces que este píxel seleccionado en la imagen original o uno de los contiguos se ha seleccionado en las imágenes Ip siguientes, el píxel seleccionado en la imagen original contándose... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la detección de un objeto en una escena situada en un sector angular determinado, y susceptible de comprender uno o varios artefactos, que comprende una etapa de barrido del sector cuya anchura angular A se barre a una velocidad angular 8', una etapa de adquisición de imágenes digitales de la escena a una velocidad f por medio de un detector matricial, estas imágenes constando de unos píxeles y que cubren un campo de anchura angular instantánea « a », que comprende las siguientes etapas de tratamiento de las imágenes adquiridas, por lote de N imágenes consecutivas con N = afl 8':
distribuir las N imágenes en P grupos de imágenes, P siendo un entero superior a 1; para cada grupo p, p comprendido entre 1 y P, acumular las imágenes del grupo de tal modo que se obtenga una imagen acumulada Ip; para cada imagen Ip, seleccionar los píxeles que verifican un criterio de detección determinado, y caracterizado porque comprende la siguiente etapa:
para cada imagen Ip comprende al menos un píxel seleccionado, denominada imagen original de confirmación, realizar una etapa de confirmación temporal que comprende las siguientes sub-etapas:
aplicar un criterio de confirmación temporal comparando un número predeterminado K (tenemos que K <= P) con el número k de veces que este píxel seleccionado en la imagen original o uno de los contiguos a este se ha seleccionado en las imágenes Ip siguientes, el píxel seleccionado en la imagen original contándose dentro de k: ese píxel se considerará como el de un objeto si k ; reiterar este criterio de confirmación temporal para todos los píxeles seleccionados de esta imagen original en la medida en que estos píxeles ya no se han tenido en cuenta en un cálculo de k.
2. Procedimiento de acuerdo con la reivindicación anterior, caracterizado porque el número de imágenes de cada grupo p se determina en función de la velocidad angular supuesta del objeto, del tamaño del ángulo de visión del píxel y de la cadencia de imagen f del detector.
3. Procedimiento de acuerdo con la reivindicación anterior, caracterizado porque el número de imágenes de cada grupo p se determina, además, en función de N.
4. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque P se determina en función de N y del número de imágenes de cada grupo.
5. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque K se determina en función de la duración supuesta de presencia de los artefactos y de la cadencia de imagen f.
6. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque se selecciona un píxel cuando la RSB > el umbral predeterminado.
7. Procedimiento de acuerdo con una de las reivindicaciones 1 a 5, caracterizado porque se selecciona un píxel cuando la señal del píxel es superior a un umbral predeterminado.
8. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque se determina un píxel contiguo en función de los desplazamientos admisibles del objeto, desde una imagen Ip a otra.
9. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque se determina un píxel contiguo en función de una trayectoria de píxeles admisible.
10. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la imagen de un objeto que cubre más de un píxel, comprende antes de la etapa de distribución de las N imágenes en P grupos, una etapa de cambio de la escala de los píxeles, es decir que un bloque de q x q de antiguos píxeles se convierte en un nuevo píxel, q siendo un entero superior o igual a 2, de tal modo que la imagen de un objeto solo cubra un píxel.
11. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la velocidad angular 8' es constante.
12. Sistema de vigilancia de un sector S comprende:
unos medios (2) de barrido del sector S cuya anchura angular A se barre a una velocidad angular 8'; unos medios (3) de formación de imágenes de escenas situadas en dicho sector S y susceptibles de comprender unos artefactos; unos medios (4) de detección de imágenes digitales de una escena, a una velocidad f que comprende un detector matricial (41) que presenta un conjunto de píxeles; una unidad (5) de tratamiento de las imágenes detectadas, caracterizado porque la unidad (5) de tratamiento comprende unos medios para la puesta en marcha del procedimiento de acuerdo con las reivindicaciones anteriores.
Patentes similares o relacionadas:
Método, sistema y producto del programa informático para determinar la presencia de microorganismos e identificar dichos microorganismos, del 29 de Julio de 2020, de BIOMERIEUX: Un método para determinar la presencia de al menos un microorganismo determinado en una placa de Petri que comprende una o más colonias de microorganismos y un medio de […]
Detección de daño de pantalla para dispositivos, del 8 de Julio de 2020, de Hyla, Inc: Un procedimiento para identificar una condición de una o más pantallas de un dispositivo electrónico, comprendiendo el procedimiento: recibir una solicitud […]
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 29 de Junio de 2020, de UNIVERSIDAD DE GRANADA: Procedimiento de identificación de imágenes óseas. La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense […]
Distribución controlada de muestras sobre sustratos, del 27 de Mayo de 2020, de Roche Diagnostics Hematology, Inc: Un procedimiento para distribuir una muestra de líquido sobre un sustrato , comprendiendo el procedimiento: obtener una […]
Procedimientos, sistemas y dispositivos para analizar datos de imágenes pulmonares, del 27 de Mayo de 2020, de Pulmonx Corporation: Procedimiento para analizar datos de tomografía computarizada de un pulmón, comprendiendo el procedimiento: recibir mediante un dispositivo […]
Sistema y procedimiento de control de calidad de platos preparados, del 14 de Mayo de 2020, de BEABLOO, S.L: Sistema y procedimiento de control de calidad de platos preparados. El sistema comprende medios de detección para detectar los ingredientes […]
Registro de imagen de catéter del seno coronario, del 13 de Mayo de 2020, de Biosense Webster (Israel), Ltd: Un aparato que comprende: un catéter cardíaco adaptado para su introducción en un seno coronario de un corazón de un sujeto vivo; una pantalla ; un dispositivo […]
Sistema y aplicación para visualizar la realidad exterior mientras se utilizan teléfonos y dispositivos móviles, del 11 de Mayo de 2020, de YAGÜE HERNANZ, Ricardo: 1. Sistema y aplicación para ver en los teléfonos y terminales móviles la realidad exterior a la vez que se usan y se visualizan sus […]