PROCEDIMIENTO PARA LA DETECCION E IDENTIFICACION AUTOMATICA DE DAÑOS EN RODAMIENTOS.
Procedimiento para la detección y la identificación automática de daños a rodamientos,
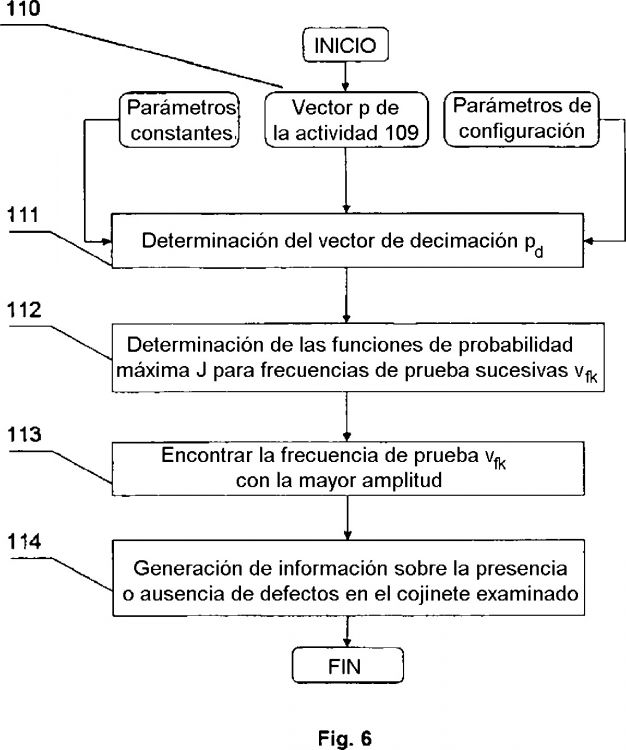
en el que las vibraciones de un cojinete en funcionamiento, medidas como una señal de onda temporal analógica se convierte en datos digitales y se filtran previamente de manera conocida, caracterizado por el hecho de que se realiza una detección de impulsos de choque con el uso de un vector binario (p) que se determina en las siguientes acciones:
- en la onda temporal filtrada previamente de la señal procesada se seleccionan dos intervalos iniciales adyacentes: uno es un intervalo de referencia y el otro es un intervalo de prueba y la señal presente en los intervalos de prueba y de referencia se someten a múltiples filtrados tras lo cual después de cada filtrado, se calcula una relación de probabilidad de impulsos de choque definida como una relación entre los valores medios cuadráticos de la señal filtrada presentes en el intervalo de prueba y los valores medios cuadráticos de la señal filtrada presentes en el intervalo de referencia,
- las relaciones de probabilidad calculadas se comparan con un valor límite preestablecido y se estima la probabilidad de aparición de impulsos de choque en el intervalo de prueba inicial,
- la información sobre la aparición de impulsos de choque en el intervalo de prueba examinado se registra como elementos iniciales del vector binario (p), y después
- todos los elementos restantes del vector binario (p) se determinan para todos los intervalos de prueba y de referencia sucesivos que son seleccionados de manera reiterada con un desplazamiento en una dirección específica y aquellos elementos del vector binario (p) adoptan valores 1 en la zona de aparición del impulso de choque y 0 en la zona en la que no se producen impulsos de choque
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07460032.
Solicitante: ABB RESEARCH LTD..
Nacionalidad solicitante: Suiza.
Dirección: AFFOLTERNSTRSASSE 52,8050 ZURICH.
Inventor/es: SAARINEN,KARI, NOWAK,JAROSLAW.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Octubre de 2007.
Clasificación Internacional de Patentes:
- G01M13/04B
Clasificación PCT:
- G01M13/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 13/00 Ensayos de partes de la máquina. › Rodamientos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento para la detección e identificación automática de daños en rodamientos.
El objeto de la invención es un procedimiento para la detección e identificación automática de daños a rodamientos aplicable al diagnóstico de rodamientos y la detección de daños en una fase muy temprana de su aparición.
En los procedimientos actuales de diagnóstico de equipos técnicos, la detección de fallos existentes y daños que se producen en una fase temprana de uso del equipo o de sus elementos individuales y su localización exacta es de una importancia primordial, y contra más pronto pueda realizarse mayor es la importancia del procedimiento. En el diagnóstico del estado del equipo y especialmente la detección y la identificación automática de defectos en máquinas eléctricas giratorias y sus elementos se utilizan procedimientos basados en la medición de señales eléctricas o mecánicas, su tratamiento así como el análisis y la interpretación de los resultados de las mediciones.
Los procedimientos aplicados actualmente para controlar cojinetes durante el funcionamiento consisten en comparar los resultados medidos y procesados digitalmente con datos obtenidos para cojinetes que funcionan en condiciones apropiadas y que no se encuentran en peligro de fallo. En la mayoría de los casos, dicha comparación la realiza un experto entrenado para este fin.
El procedimiento utilizado más frecuentemente para la determinación temprana de defectos en cojinetes consiste en el examen de impulsos de choque combinado con el examen de las vibraciones en los elementos analizados del cojinete. Después, dichas formas de los impulsos son seleccionadas a partir de los datos medidos para un análisis adicional que sugiere la posibilidad de la presencia de un defecto. Los procedimientos informatizados de análisis de datos permiten detectar fallos de manera temprana y determinar el lugar de su aparición, sus tipos y el nivel de daño.
De la descripción de la patente americana US 5 477 730 se conoce un procedimiento y un dispositivo para comprobar el estado de un cojinete. El procedimiento consiste en detectar las señales primarias de las vibraciones emitidas por el cojinete, la desmodulación de estas señales a señales de salida después de la desmodulación, la conversión de las señales de salida de señales analógicas a señales de salida digital, el filtrado de ruido fuera de estas señales por medio de tecnología de filtrado digital seleccionada de numerosas de tecnologías conocidas, y emisión de las señales digitales a un dispositivo de salida. En otra variante de la invención, en lugar de la desmodulación de señales primarias, se utiliza filtrado de paso de banda en un intervalo de 2000 a 15 000 hertzios, y las señales después de este filtrado se someten a transformaciones tal como se ha descrito anteriormente. Todavía en otra variante de la invención las señales primarias de vibración emitidas por el cojinete se convierten de analógicas a digitales, con lo que el ruido es filtrado de las señales utilizando tecnología de filtrado digital seleccionada de numerosas de tecnologías conocidas, que incluye la acción de separación de señales de ruido de las señales de la salida digital, y después las señales digitales se envían al dispositivo de salida.
De la solicitud de patente WO 00/04361 se conoce un procedimiento para evaluar el estado de los elementos de un cojinete. Este procedimiento emplea las mediciones de las vibraciones del elemento del cojinete generando una señal de aceleración analógica, convirtiendo esta señal en datos digitales, muestreando la señal digital para localizar sus componentes que vienen del defecto del cojinete. El procedimiento se caracteriza por el hecho de que la influencia de cualquier componente de señal indeseado determinista es eliminado de la señal de aceleración digital a través del filtrado para así obtener una señal que consiste esencialmente en ruido blanco proporcional a la suavidad global de la microestructura de la superficie del cojinete y el impulso de choque. Se seleccionan los siguientes parámetros característicos de la señal que son sensibles a los defectos del cojinete: impulsos agudos de vibración o impulsos de choque, amplitud pico a pico, valor medio proporcional a la amplitud media sin impulsos de choque, contenido máximo de la señal. La detección de impulsos de choque de banda estrecha a intervalos regulares se realiza utilizando un procedimiento conocido, denominado autocorrelación de la estimación de señal de envolvente.
La esencia del procedimiento para la detección y la identificación automática de daños a rodamientos, en el que las vibraciones de un cojinete en funcionamiento, medidas como una señal analógica de onda temporal se convierten a datos digitales y se filtran previamente de manera conocida, es que la detección de los impulsos de choque se realiza utilizando un vector binario p que se determina en las siguientes acciones:
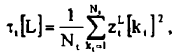
Preferiblemente, el valor medio cuadrático de la señal en el intervalo de prueba examinado sometido a un filtrado Ln tt [L] se determina en base siguiente relación:
mientras que el valor medio cuadrático de la señal en el intervalo de referencia examinado sometido a un filtrado Ln tr [L] se determina en base siguiente relación:
donde:
L es un número natural del intervalo 1... Ns e indica el número de filtros,
Kt, indica la longitud del intervalo de prueba examinado,
Kr, indica la longitud del intervalo de referencia,
kt, kr indica números naturales sucesivos 1 a kt o kr,
zLt indica un vector que representa el intervalo de prueba examinado de la señal sometida a un filtrado Ln,
zLr, indica un vector que representa el intervalo de referencia examinado de la señal sometida a un filtrado Ln,
Preferiblemente, el valor medio cuadrático de una señal en el intervalo de referencia examinado tr [L] se determina utilizando un filtrado Ln, que es un filtrado adaptativo, con el uso de descomposición en valores singulares (SVD) de una matriz de autocovarianza Cr, de acuerdo con la siguiente relación:
donde la matriz Sr es una matriz diagonal cuyos elementos diagonales son distintos de cero y no son negativos e indica valores medio cuadrático tr [L]:
y las matrices V y U son matrices ortogonales y al mismo...
Reivindicaciones:
1. Procedimiento para la detección y la identificación automática de daños a rodamientos, en el que las vibraciones de un cojinete en funcionamiento, medidas como una señal de onda temporal analógica se convierte en datos digitales y se filtran previamente de manera conocida, caracterizado por el hecho de que se realiza una detección de impulsos de choque con el uso de un vector binario (p) que se determina en las siguientes acciones:
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que dicho valor cuadrático medio de la señal en el intervalo de prueba examinado sometido a filtrado Ln (tt [L]) se determina en base a la siguiente relación:

mientras que el valor cuadrático medio de la señal en el intervalo de referencia examinado sometido a filtrado Ln (tr [L]) se determina en base a la siguiente relación:

donde:
L es un número natural del intervalo 1... NS e indica el número de filtros,
Kt indica la longitud del intervalo de prueba examinado,
Kr indica la longitud del intervalo de referencia examinado,
kt, kr indica los números naturales sucesivos 1 al Kt o al Kr,
zLt indica un vector que representa el intervalo de prueba examinado de la señal sometido a filtrado Ln
zLr indica un vector que representa el intervalo de referencia examinado de la señal sometido a filtrado Ln.
3. Procedimiento según la reivindicación 2, caracterizado por el hecho de que dicho valor cuadrático medio de una señal en el intervalo de referencia examinado (tr [L]) se determina usando filtrado Ln, que es un filtrado adaptativo, con uso de descomposición en valores singulares (SVD) de la matriz de autocovarianza (Cr) de acuerdo con la siguiente relación:
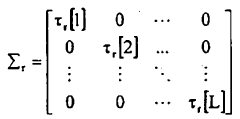
donde la matriz (?r) es una matriz diagonal cuyos elementos diagonales son distintos de cero y no negativos e indican valores medios cuadráticos (tr [L]):
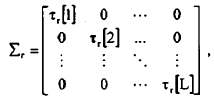
y las matrices (V) y (U) son matrices ortogonales y al mismo tiempo la matriz de autocovarianza (Cr) presentan la siguiente forma:
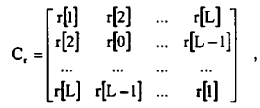
para la cual:
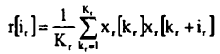
donde:
xr [kr] son los elementos del intervalo de referencia,
kr indica números naturales sucesivos de 1 a Kr,
ir indica números naturales sucesivos de 1 a L,
Kr indica la longitud del intervalo de referencia.
L indica el número de filtros adaptativos.
4. Procedimiento según la reivindicación 2, caracterizado por el hecho de que dicho valor cuadrático medio de una señal en el intervalo de prueba examinado (tr [L]) se determina utilizando filtrado Ln, que es un filtrado adaptativo, en base a la siguiente relación:
donde zLt son los elementos de la matriz Zt presentada de la siguiente manera:
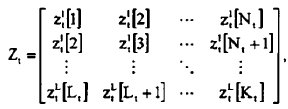
y calculada de acuerdo con la siguiente relación:
donde la matriz (Xt) se define como:
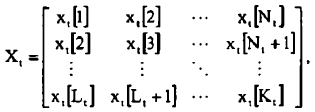
y la matriz (U) es una matriz ortogonal cuyos elementos son los coeficientes del filtro adaptativo, mientras que:
Kt indica la longitud del intervalo de prueba examinado;
xt [kt], son los elementos del intervalo de prueba;
kt indica los números naturales sucesivos de 1 a Kt,
L indica el número de filtros adaptativos.
5. Procedimiento según la reivindicación 1 o 2, caracterizado por el hecho de que el filtrado múltiple de señales en los intervalos de prueba y de referencia se realiza con el uso de un filtro de paso de banda.
6. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que la longitud del intervalo de prueba (Kt) es un 15% de la longitud del intervalo de referencia (Kr).
7. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que la identificación del defecto en el cojinete o cojinetes se realizad automáticamente para el vector binario (p) determinado para todos los intervalos de prueba y de referencia examinados de la onda temporal (X) de la señal procesada y el conjunto de frecuencias de defectos conocidos del cojinete o cojinetes examinados ((FF) = [ff1, ff1,..., ffK]), por medio de las siguientes acciones:
8. Procedimiento según la reivindicación 7, caracterizado por el hecho de que dicha frecuencia de prueba (vfK), para la cual se calcula la función máxima de la probabilidad para el vector binario (p) en dominio de tiempo alcanza el valor máximo (JA) se determina maximizando la suma cuadrática de amplitudes armónicas (Ak) de acuerdo con esta relación:
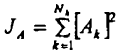
donde:
Nh es un número preestablecido de los armónicos examinados.
Ak una amplitud armónica determinada en el dominio de tiempo utilizando el vector binario p, presentado en forma de modelo sinusoidal.
9. Procedimiento según la reivindicación 8, caracterizado por el hecho de que dichos valores de las amplitudes de los armónicos (Ak) se determina en el dominio de tiempo utilizando el vector binario (p), presentado en forma de modelo sinusoidal en el que el vector binario (p) se presenta como una suma del modelo sinusoidal y el vector de ruido:

qué puede presentarse también en forma de la siguiente matriz:
donde:
fk es una fase,
?k=2pvk/fs, k=1, 2... Nh es la velocidad angular correspondiente a una frecuencia específica (v), k =1, 2... Nh,
fs es la frecuencia de muestreo de la señal analógica medida cuando se realiza la conversión analógico a digital,
e = [
n indica un número natural de 1 a N-1,
N indica el número de elementos en el vector binario (p),
B es la matriz de parámetros constantes conocidos, presentada de la siguiente manera:

y ? es el vector de parámetros desconocidos, presentado de la siguiente manera:
que es el estimador de mínimos cuadrados para la relación:
donde (p) es un vector binario de la siguiente forma:
10. Procedimiento según la reivindicación 7, caracterizado por el hecho de que el nivel de ruido (nA) se calcula tomando un valor medio de los valores de función máxima (J) que se encuentran en las proximidades de la frecuencia del defecto examinado (ffK) del conjunto (Ff).
11. Procedimiento según la reivindicación 7, caracterizado por el hecho de que dicho nivel de ruido (nA) se calcula tomando un valor medio de los valores de función máxima (J) que se encuentran en las proximidades de la frecuencia del defecto examinado (ffK) del conjunto (Ff).
Patentes similares o relacionadas:
 PROCEDIMIENTO Y DISPOSITIVO PARA EL ANÁLISIS DE RODAMIENTOS EN MÁQUINAS, del 10 de Marzo de 2011, de PRÜFTECHNIK DIETER BUSCH AG: Procedimiento dispositivo para el análisis de rodamientos incorporados en máquinas, en el que por medio de un sensor es detectada una señal de aceleración, […]
PROCEDIMIENTO Y DISPOSITIVO PARA EL ANÁLISIS DE RODAMIENTOS EN MÁQUINAS, del 10 de Marzo de 2011, de PRÜFTECHNIK DIETER BUSCH AG: Procedimiento dispositivo para el análisis de rodamientos incorporados en máquinas, en el que por medio de un sensor es detectada una señal de aceleración, […]
Sistema y método de medición del consumo de cojinetes de motor de vehículos ferroviarios, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Sistema de medición del consumo de cojinetes de motor de vehículos ferroviarios, que comprende: una rueda fónica , dispuesta para fijarse a un eje de un rotor, […]
Sistema de detección de fallos y método asociado, del 8 de Abril de 2020, de GENERAL ELECTRIC COMPANY: Método de detección de fallos en un dispositivo electromecánico , incluyendo el dispositivo electromecánico un conjunto de rotor , un cojinete […]
Sistema de detección de fallos y procedimiento asociado, del 1 de Abril de 2020, de GENERAL ELECTRIC COMPANY: Un procedimiento para detectar fallos de rodamiento dentro de un tren de transmisión acoplado a un generador que genera una energía de salida, en […]
Mantenimiento predictivo de cojinetes de rodadura, del 1 de Enero de 2020, de TETRA LAVAL HOLDINGS & FINANCE S.A.: Método de predicción de un defecto en un cojinete de rodadura, incluyendo el cojinete de rodadura anillos (3a, 3b) interior y exterior y cuerpos (3c) de rodadura distribuidos […]
Método y dispositivo para proporcionar una evaluación de condición de una estructura mecánica que incluye un componente de máquina giratoria, del 27 de Noviembre de 2019, de Vibsim: Un método para proporcionar una evaluación de condición de una estructura mecánica que incluye un componente de máquina rotativa, comprendiendo el método: […]
Dispositivo para la medición de fuerza en el rodamiento mediante capa de sensor, del 9 de Octubre de 2019, de Schaeffler Technologies AG & Co. KG: Cojinete de medición , en el que el cojinete de medición presenta un rodamiento , al menos un anillo de introducción de fuerza y un espacio de […]
Procedimiento para el examen acústico de la via de rodadura de un rodamiento de gran tamaño, del 4 de Septiembre de 2019, de NORDEX ENERGY GMBH: Procedimiento para el examen de la vía de rodadura de un rodamiento de gran tamaño en una instalación de energía eólica, que presenta […]