Procedimiento de detección de la distorsión de una señal GNSS.
Procedimiento de detección de la distorsión de una señal GNSS transmitida por al menos un satélite GNSS yrecibida por al menos un receptor GNSS,
teniendo dicha distorsión como origen un defecto de generación de laseñal GNSS, caracterizándose dicho procedimiento porque comprende al menos las siguientes etapas:
• una etapa de determinación de al menos un modelo paramétrico autorregresivo de la señal GNSS a lasalida de una etapa de correlación que comprende dicho receptor GNSS;
• una etapa de cálculo (203) de al menos un error de predicción lineal e(n) entre dicha señal de salida de laetapa de correlación y dicho modelo paramétrico autorregresivo;
• al menos una etapa de comparación (205) del error de predicción lineal con un umbral de detección;
• una etapa de decisión (207) sobre la distorsión de la señal GNSS transmitida en el caso de que el error depredicción lineal supere dicho umbral de detección
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11187672.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: MONNERAT,MICHEL, KUBRAK,DAMIEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Monitorización de la integridad, detección o aislamiento de fallos del segmento espacial.
PDF original: ES-2426574_T3.pdf
Fragmento de la descripción:
Procedimiento de detección de la distorsión de una señal GNSS
El campo de la invención se refiere a los sistemas de posicionamiento y/o de radionavegación por satélite comúnmente designados por el término sistemas GNSS (« Global Navigation Satellite System ») . En particular, la invención se puede aplicar a los sistemas GNSS conocidos como GPS (« Global Positioning System ») y GALILEO.
De manera más precisa, el campo de la invención es el de los sistemas de aumento de la disponibilidad de los sistemas GNSS que permiten utilizar las señales GNSS transmitidas por los satélites incluso cuando se modifica su integridad.
La señal emitida por un satélite GNSS puede verse afectada por errores aleatorios que conllevan una distorsión de la señal y hacen que no sea conforme con las especificaciones del sistema. Este tipo de errores se refieren, por ejemplo, a una modificación aleatoria del periodo de los códigos de ensanchamiento que genera una ruptura de estacionalidad en la señal o incluso la presencia de ondulaciones que modifican la forma cuadrada, característica de una señal modulada mediante un código de ensanchamiento, esperada en la salida del generador de señal.
Este tipo de errores están vinculados a la implementación del emisor a bordo del satélite y, en particular, a los defectos de los equipos que no son perfectos.
Las mediciones que se llevan a cabo sobre una señal GNSS no conforme y afectada por estos fallos están sujetas a errores y van a conllevar un mal posicionamiento del receptor GNSS que utiliza esta señal. Es, por lo tanto, importante poder detectar dichos errores con el fin de alertar al receptor de la no-conformidad de la señal que este utiliza y de evitar errores de posicionamiento o de navegación que pueden tener consecuencias críticas.
A continuación, nos referimos a señales « evil waveform » para designar unas señales GNSS afectadas por errores o por distorsiones que son consecuencia de los defectos de los equipos materiales instalados a bordo del satélite.
Las soluciones conocidas que permiten detectar unas señales « evil waveform » están la mayoría de las veces basadas en el uso de la función de correlación en la salida de los integradores del receptor GNSS. Esta técnica tiene como principal inconveniente no diferenciar los errores vinculados a las imperfecciones del emisor instalado a bordo del satélite y las vinculadas a los multitrayectos ligados a las reflexiones de la señal en las diferentes capas de la ionosfera. Además, estas técnicas son muy sensibles al ruido ambiental. Los errores vinculados a la transmisión de la señal se pueden corregir mediante tratamientos adecuados y se deben disociar de los errores introducidos desde que se generó la señal.
También se conoce el documento "Characterization of signal deformations for GPS and WAAS satellites, 23º international technical meeting of the satellite division of the institute of navigation" publicado el 24/09/2012 que da a conocer un método de medición de las distorsiones que afectan a las señales emitidas por satélites GNSS a partir de señales reales.
También se conoce el documento « Development of a transform-domain instrumentation global positioning system receiver for signal quality and anomalous event monitoring », Sanjeev Gunawardena, tesis doctoral, Ohio University, 30 de junio de 2007, páginas 82-105, USA. Este documento da a conocer un método de evaluación y de modelización de las perturbaciones generadas por la parte « front-end » de un receptor GNSS sobre la señal de salida del receptor. Este documento no aborda, sin embargo, el problema de las distorsiones que afectan directamente a la señal recibida y a la detección de señales de tipo « evil waveform ».
La presente invención propone resolver las limitaciones de la técnica anterior gracias a una solución basada en la modelización de la señal GNSS y en un cálculo de predicción lineal que permite detectar las distorsiones intrínsecas de la señal y generar una alerta, por ejemplo a través de un sistema de aumento, para invalidar las mediciones de pseudo-distancias realizadas sobre esta señal para determinar una información de posicionamiento.
La invención tiene en particular como ventaja limitar las falsas alarmas asociadas a detecciones de errores de transmisión y ser más robusta frente al ruido.
Para ello, la invención tiene por objeto un procedimiento de detección de la distorsión de una señal GNSS transmitida por al menos un satélite GNSS y recibida por al menos un receptor GNSS, teniendo dicha distorsión como origen un defecto de generación de la señal GNSS, caracterizándose dicho procedimiento porque comprende al menos las siguientes etapas:
predicción lineal supere dicho umbral de detección.
De acuerdo con un aspecto particular de la invención, el modelo paramétrico autorregresivo se obtiene mediante la aplicación de uno de los métodos siguientes: método de la covarianza, método de la covarianza modificada, método de Yule-Walker.
De acuerdo con otro aspecto particular de la invención, el cálculo del error de predicción lineal e (n) se lleva a cabo al
menos aplicando la siguiente relación:
coeficientes del modelo autorregresivo y x (n) son las muestras de la señal a la salida de de la etapa de correlación.
De acuerdo con otro aspecto particular de la invención, el error de predicción lineal e (n) se promedia en un periodo determinado antes de compararlo con el umbral de detección.
La invención también tiene por objeto un receptor GNSS que comprende al menos una antena adaptada para recibir una señal GNSS, unos medios de radio de conversión analógica digital, una etapa de correlación, unos medios de procesamiento de la señal que emite a su salida una información de posicionamiento o de navegación, caracterizado porque comprende, además, unos medios adaptados para ejecutar el procedimiento de detección de la distorsión de dicha señal GNSS de acuerdo con la invención.
Se mostrarán otras características y ventajas de la invención mediante la siguiente descripción que se hace en referencia a los dibujos adjuntos, que representan:
la figura 1, una ilustración de dos ejemplos de distorsión que afectan a una señal GNSS;
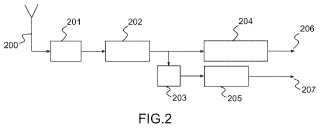
la figura 2, un esquema sinóptico de un receptor GNSS de acuerdo con la invención.
La figura 1 esquematiza una porción de señal GNSS perfecta 101 que está constituida por una sucesión de intervalos de tiempo cuyo periodo de repetición se conoce y se determina mediante el código de ensanchamiento asociado a la señal transmitida. En la figura 1 se representa superpuesta una señal GNSS imperfecta 102 o señal « evil waveform » distorsionada con respecto a la señal perfecta 101. Las distorsiones adoptan en particular dos formas. Una primera distorsión del periodo del código de ensanchamiento genera un desplazamiento temporal Lt entre la señal recibida 102 y la señal 101. Este desplazamiento temporal va a generar un desplazamiento entre el pico de correlación medido y el que se debería observar en realidad y de este modo inducir un error sobre el instante de recepción de la señal emitida por el satélite.
Una segunda distorsión en forma de ondulaciones de la señal 102 genera errores, en particular, sobre las mediciones realizadas sobre la función de correlación que se utiliza para calcular las pseudo-distancias entre el receptor y los satélites, y a continuación elaborar, por triangulación, una información de posicionamiento. Dichas ondulaciones tienen como efecto una función de correlación asimétrica y distorsionada lo que también plantea problemas de estimación del pico de correlación que indica el instante de recepción de la señal emitida por el satélite.
Las distorsiones citadas anteriormente tienen un impacto en la integridad de la señal GNSS. La invención pretende en particular detectar los dos tipos de distorsión mencionados con anterioridad, pero también se puede aplicar a cualquier tipo de distorsión que afecte a la integridad de la señal GNSS y que tiene como origen un defecto... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de detección de la distorsión de una señal GNSS transmitida por al menos un satélite GNSS y recibida por al menos un receptor GNSS, teniendo dicha distorsión como origen un defecto de generación de la señal GNSS, caracterizándose dicho procedimiento porque comprende al menos las siguientes etapas:
o una etapa de determinación de al menos un modelo paramétrico autorregresivo de la señal GNSS a la salida de una etapa de correlación que comprende dicho receptor GNSS;
o una etapa de decisión (207) sobre la distorsión de la señal GNSS transmitida en el caso de que el error de predicción lineal supere dicho umbral de detección.
2. Procedimiento de detección de acuerdo con la reivindicación 1, caracterizado porque el modelo paramétrico autorregresivo se obtiene mediante la aplicación de uno de los métodos siguientes: método de la covarianza, método de la covarianza modificada, método de Yule-Walker.
3. Procedimiento de detección de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el cálculo del error de predicción lineal e (n) se lleva a cabo al menos aplicando la siguiente relación:
en la que ak son los coeficientes del modelo autorregresivo que comprende un número p de coeficientes y x (n) son las muestras de la señal a la salida de la etapa de correlación.
5. Procedimiento de detección de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la información sobre la distorsión de la señal GNSS se transmite, además, a un sistema de aumento de la disponibilidad del sistema GNSS.
(201) de radio de conversión analógico digital, una etapa de correlación (202) , unos medios (204) de procesamiento de la señal que emiten en su salida una información de posicionamiento o de navegación, caracterizado porque comprende, además, unos medios (203, 205) adaptados para ejecutar las etapas del procedimiento de detección de la distorsión de dicha señal GNSS de acuerdo con una de las reivindicaciones 1 a 5.
Patentes similares o relacionadas:
Procedimiento mejorado para determinar la posición y/o la velocidad de un vehículo guiado; sistema asociado, del 27 de Marzo de 2019, de ALSTOM Transport Technologies: Un procedimiento para seleccionar un conjunto de satélites visibles utilizables (LSVU) de un conjunto de satélites visibles (LSV) de una constelación de […]
Dispositivo y procedimiento para la determinación de la posición y/o velocidad de un aparato en un sistema para la navegación por satélite, del 30 de Agosto de 2017, de MBDA Deutschland GmbH: Dispositivo para la determinación de la posición y/o velocidad de un aparato en un sistema para la navegación por satélite, que presenta una pluralidad […]
Procedimiento para mejorar de la continuidad en un sistema de navegación por satélite de doble frecuencia, del 24 de Agosto de 2016, de Airbus DS GmbH: Procedimiento para procesar un mensaje de alarma que se ha generado y transmitido por medio de un procedimiento para mejorar la continuidad en un […]
Sistema y procedimiento de determinación del error de posición de un receptor de localización satelital, del 3 de Agosto de 2016, de THALES: Sistema de determinación de una distribución de un error de posición de un receptor de señales de localización, siendo enviadas dichas señales por al menos un satélite, […]
Un algoritmo RAIM perfeccionado, del 15 de Octubre de 2014, de Airbus DS GmbH: Un método RAIM para determinar un riesgo de integridad en un GNSS procesando varias señales de medición de distancias recibidas de satélites del GNSS en que […]
Método y aparato para determinar un parámetro de indicación de integridad que indica la integridad de la información de posicionamiento determinada en un sistema de posicionamiento global, del 4 de Junio de 2014, de EUROPEAN SPACE AGENCY: Un método para determinar un parámetro de indicación de integridad (IR; PL) que indica la integridad de la información de posicionamiento determinada […]
Un método para detectar los cambios de frecuencia de reloj en un reloj a bordo de un satélite de un sistema de navegación global, del 4 de Junio de 2014, de Airbus DS GmbH: Un método para detectar saltos de frecuencia de reloj que se producen a bordo de un satélite de navegación de un sistema de navegación global, que comprende […]
Un método de reducción del impacto de los saltos de frecuencia de vehículos espaciales sobre un dispositivo de navegación global, del 26 de Febrero de 2014, de ASTRIUM GMBH: Un método de reducción del impacto de saltos de frecuencia de reloj de vehículos espaciales sobre un dispositivo para detección de posición en un sistema de navegación […]