Procedimiento para controlar el movimiento de un motor eléctrico y sistema para controlar el movimiento de un motor eléctrico.
Procedimiento para controlar el movimiento de un motor eléctrico,
estando alimentado el motor eléctrico por una tensión total (VT) proporcional 5 a una tensión de red alterna (VAC),
comprendiendo el procedimiento las etapas de:
- realizar una primera medición de nivel (Vt10) de la tensión de red (VAC) en un primer instante de medición (t10);
- realizar una segunda medición de nivel (Vt20) de la tensión de red (VAC) en un segundo instante de medición (t20);
- calcular el valor de la derivada de los valores de tensión medidos en función del primer y el segundo instante de medición (t10, t20) para obtener un valor de una tensión de red proporcional (VAC'); y
- alterar el valor de la tensión total (VT) suministrada al motor, proporcionalmente al valor de la tensión de red proporcional (VAC'),
caracterizado por el hecho de que la tensión total (VT) se altera en función de la diferencia entre el valor de una tensión de red proporcional (VAC') calculada en un ciclo presente de la tensión de red (VAC) y el valor de la tensión de red proporcional (VAC') calculada en el ciclo anterior de la tensión de red (VAC).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/BR2004/000114.
Solicitante: WHIRLPOOL S.A..
Nacionalidad solicitante: Brasil.
Dirección: Avenida das Nações Unidas 12995 32 andar 04578-000 São Paulo SP BRASIL.
Inventor/es: DAINEZ, PAULO, SERGIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02P23/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › Disposiciones o métodos para el control de motores de corriente alterna que se caracterizan por un método de control que no sea control por vector.
- H02P27/00 H02P […] › Disposiciones o métodos para el control de motores de corriente alterna caracterizados por la clase de voltaje de alimentación (de dos o más motores H02P 5/00; de motores síncronos con conmutadores electrónicos H02P 6/00; de motores de corriente continua H02P 7/00; de motores paso a paso H02P 8/00).
PDF original: ES-2495040_T3.pdf
Fragmento de la descripción:
Procedimiento para controlar el movimiento de un motor eléctrico y sistema para controlar el movimiento de un motor eléctrico La presente invención se refiere a un procedimiento para controlar el movimiento de un motor eléctrico, un sistema para controlar el movimiento de un motor eléctrico, así como a un compresor provisto de un sistema de acuerdo con la presente invención.
Descripción de la técnica anterior De la técnica anterior ya se conocen sistemas para controlar el movimiento de un motor eléctrico.
El control de los movimientos de un motor eléctrico es especialmente importante para el control de motores aplicados a compresores lineales, ya que con estos últimos la carrera del pistón respectivo no se ha establecido previamente. Debido a esta característica constructiva, el pistón puede chocar con el final de carrera respectivo bajo determinadas circunstancias, lo que se traduce en ruido no deseable, daños al rendimiento del compresor o incluso la ruptura del compresor.
Un control de los movimientos de los motores eléctricos generalmente monitoriza las variables internas del propio equipo, por ejemplo, la posición del pistón dentro de un cilindro, la capacidad requerida para llegar a una demanda del motor determinada. Los sistemas de este tipo puede comprender, por ejemplo, compresores acoplados a sistemas de refrigeración, en los cuales es necesario controlar la capacidad de refrigeración del compresión e impedir, además, que el pistón respectivo choque con el final de la carrera, si la capacidad de refrigeración varía de repente.
Ejemplos de este tipo de técnica pueden encontrarse en los documentos US 5.432.176; US 5.496.153; US 5.450.521; y US 5.592.073. De acuerdo con lo que divulga esta técnica, se utiliza un control sobre la carrera del pistón, que constituye un controlador de la tensión impuesta al motor lineal, re-alimentado por información acerca de la posición del pistón, básicamente estimada a partir de la información de la corriente suministrada al motor y la tensión inducida en los terminales del motor.
Otro documento de la técnica anterior US 5.325.037 describe un sistema de control de un motor de acuerdo con el preámbulo de la reivindicación 10 en el que la energía se regula si ésta es mayor o menor que una tensión normal, generándose una señal de compensación para igualar la energía aplicada a una carga.
Otro documento de la técnica anterior EP 0 312 686 describe un circuito para suministrar una cantidad de energía predeterminada a una carga sin regular la tensión a través de la carga en ciclos específicos para compensar la energía suministrada a la carga cuando se requiere.
En estas soluciones, la carrera del pistón se controla tomando como referencia la posición del pistón estimada, la cual se calcula a partir de la corriente y la tensión en los terminales del motor, pero que da lugar a errores debido a variaciones constructivas del motor, variaciones de temperatura, lo cual limita la eficiencia y el funcionamiento en condiciones extremas de capacidad de enfriamiento. Otra deficiencia de este tipo de solución es que el cálculo del punto de movimiento promedio del pistón es impreciso, básicamente causado por la diferencia promedio entre la presión de succión y la descarga, y la constante elástica del muelle del sistema resonante.
En aplicaciones de refrigeración, por ejemplo, durante el funcionamiento, el motor eléctrico junto con el compresor se verán sometidos a diversos tipos de transitorios, tales como la apertura de la puerta del sistema de refrigeración, el cambio de la carga térmica, la variación en la temperatura ambiente, la apertura o cierre de válvulas del sistema, todos estos transitorios termomecánicos tienen constantes de tiempo que son lentas en comparación con el tiempo de respuesta del control, y no causan perturbaciones en el desplazamiento del compresor, ya que el control se gestiona para actuar antes de que se note cualquier efecto.
Los fenómenos más bruscos a los que verá sometido el sistema son alteraciones en la tensión de la red, y estas perturbaciones pueden afectar al funcionamiento del compresor y, dependiendo del estado de funcionamiento del compresor y la amplitud de la perturbación, puede producirse un impacto mecánico del pistón con la parte superior del cilindro.
Ninguna de las soluciones propuestas analiza las variaciones de tensión de red y, por lo tanto, no pueden garantizar con seguridad que el sistema corrija a tiempo las perturbaciones en la red, evitando el impacto mecánico y oscilaciones en el desplazamiento máximo que afectan a la eficiencia del sistema.
La solución propuesta tiene los siguientes objetivos:
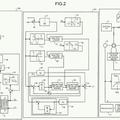
Estos objetivos se consiguen mediante un procedimiento para controlar los movimientos de un motor eléctrico, estando alimentado el motor eléctrico por una tensión total (VT) proporcional a una tensión de red alterna (VAC) , comprendiendo el procedimiento las etapas de: realizar una primera medición de nivel (Vt10) de la tensión de red (VAC) en un primer instante de medición (t10) ; realizar una segunda medición de nivel (Vt20) de tensión de red (VAC) en un segundo instante de medición (t20) ; comprendiendo el procedimiento, además, las etapas de calcular el valor de la derivada de los valores de tensión medidos en función del primer y el segundo instante de medición (t10, t20) para obtener un valor de una tensión de red proporcional (VAC') ; y alterar el valor de la tensión total (VT) proporcionada al motor, proporcionalmente al valor de la tensión de red proporcional (VAC') , alterándose la tensión total (VT) en función de la diferencia entre el valor de una tensión de red proporcional (VAC') calculada en un ciclo presente de la tensión de red (VAC) y el valor de tensión de red proporcional (VAC') calculado en el ciclo anterior de la tensión de red (VAC) . Estos objetivos se consiguen mediante un sistema para controlar los movimientos de un motor eléctrico que comprende una central de control electrónico (10) , alimentándose el motor eléctrico mediante una tensión total (VT) controlada por la central de control electrónico (10) , y siendo la tensión total (VT) proporcional a una tensión de red alterna (VAC) , en el que la central de control electrónico (10) incluye un circuito de detección de tensión (50) que comprende un primer circuito de detección de tensión (51) que detecta un primer nivel de tensión de la red (VM1) y un segundo circuito de detección de tensión (52) que detecta un segundo nivel de tensión de la red (VM2) y estando dispuesta la central de control electrónico (10) para medir el primer nivel de tensión de la red (VM1) en un primer instante de medición (t10) y el segundo nivel de tensión de la red (VM2) en un segundo instante de medición (t20) , estando dispuesto el primer circuito de detección de tensión (51) para calcular el valor de la derivada de los valores de tensión de red medidos en función del primer y el segundo instante de medición (t10, t20) , para obtener un valor de una tensión de red proporcional (VAC') ; y estando dispuesta la central de control electrónico (10) para alterar el valor de la tensión total (VT) proporcionalmente al valor de la tensión de red proporcional (VAC') , alterándose el valor de la tensión total (VT) en función de la diferencia entre el valor de una tensión de red proporcional (VAC') calculada en un ciclo presente de la tensión de red (VAC) y el valor de la tensión de red proporcional (VAC') calculada en el ciclo anterior de la tensión de red (VAC) . Breve descripción de los dibujos La presente invención se describirá ahora con mayor detalle con referencia a una realización representada en los dibujos. Las figuras muestran: o Controlar el nivel de tensión aplicada a los motores eléctricos en general;
Reivindicaciones:
1. Procedimiento para controlar el movimiento de un motor eléctrico, estando alimentado el motor eléctrico por una tensión total (VT) proporcional a una tensión de red alterna (VAC) , comprendiendo el procedimiento las etapas de:
- realizar una primera medición de nivel (Vt10) de la tensión de red (VAC) en un primer instante de medición (t10) ; -realizar una segunda medición de nivel (Vt20) de la tensión de red (VAC) en un segundo instante de medición (t20) ; -calcular el valor de la derivada de los valores de tensión medidos en función del primer y el segundo instante de medición (t10, t20) para obtener un valor de una tensión de red proporcional (VAC') ; y -alterar el valor de la tensión total (VT) suministrada al motor, proporcionalmente al valor de la tensión de red proporcional (VAC') , caracterizado por el hecho de que la tensión total (VT) se altera en función de la diferencia entre el valor de una tensión de red proporcional (VAC') calculada en un ciclo presente de la tensión de red (VAC) y el valor de la tensión de red proporcional (VAC') calculada en el ciclo anterior de la tensión de red (VAC) .
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que el valor de la tensión total (VT) se altera en función de la diferencia entre el valor de la tensión de red proporcional (VAC') calculada en un semiciclo presente de la tensión de red (VAC) y el valor de la tensión de red proporcional (VAC') calculada en el semiciclo anterior de la tensión de red (VAC) .
3. Procedimiento según la reivindicación 2, caracterizado por el hecho de que el valor de la tensión de red proporcional (VAC') se obtiene a partir de la ecuación:
en el que âV0 se obtiene restando la primera y la segunda medición de nivel (Vt10, Vt20) , y el valor de ât se obtiene restando los valores del primer y el segundo instante de medición (t10, t20) .
4. Procedimiento según la reivindicación 2, caracterizado por el hecho de que después de la etapa de obtener el valor de la tensión de red proporcional (VAC') se prevé una etapa de:
- medir el lapso de tiempo (tD) entre cuando se produce la medición del primer instante de la medición (t10) y cuando se produce la medición del segundo instante de medición (t20) , -comparar el lapso de tiempo (tD) con un tiempo preestablecido (tp) , -alterar el valor de la tensión total (VT) proporcionalmente al valor de la tensión de red proporcional (VAC') , siendo el valor de la tensión de red proporcional (VAC') proporcional al lapso de tiempo (tD) , cuando el lapso de tiempo (tD) es diferente de un tiempo preestablecido (tp) .
5. Procedimiento según la reivindicación 4, caracterizado por el hecho de que el tiempo preestablecido corresponde con el tiempo de retraso (tD) del ciclo anterior de la tensión de red (VAC) .
6. Procedimiento según la reivindicación 5, caracterizado por el hecho de que en la etapa de alterar la tensión total (VT) se prevé la elevación de la tensión total (VT) si el lapso de tiempo (tD) es mayor que el tiempo preestablecido (tp) .
7. Procedimiento según la reivindicación 6, caracterizado por el hecho de que en la etapa de alterar la tensión total (VT) se prevé la disminución de la tensión total (VT) si el lapso de tiempo (tD) es menor que el tiempo preestablecido (tp) .
8. Procedimiento según la reivindicación 7, caracterizado por el hecho de que el valor de la tensión total (VT) corresponde a una diferencia entre el valor de la tensión de pistón (Vp) y el valor de la tensión de red proporcional (VACâ?) , estableciéndose previamente el valor de la tensión del pistón (Vp) .
9. Procedimiento según la reivindicación 8, caracterizado por el hecho de que la tensión total (VT) alimenta un motor eléctrico de un compresor, comprendiendo el compresor un pistón.
10. Sistema para controlar el movimiento de un motor eléctrico, que comprende: una central de control electrónico (10) , estando alimentado el motor eléctrico por una tensión total (VT) controlada por la central de control electrónico (10) , y siendo la tensión total (VT) proporcional a una tensión de red alterna (VAC) , en el que la central de control electrónico (10) incluye un circuito de detección de tensión (50) que comprende un primer circuito de detección de tensión (51) que detecta un primer nivel de tensión de red (VM1) y un segundo circuito de detección de tensión (52) que detecta el segundo nivel de tensión de red (VM2) y estando dispuesta la central de control electrónico (10) para medir el primer nivel de tensión de red (VM1) en un primer instante de medición (t10) y el segundo nivel de tensión de red (VM2) en un segundo instante de medición (t20) , estando dispuesta la central de control electrónico para calcular el valor de la derivada de los valores de tensión medidos en función del primer y el segundo instante de medición (t10, t20) , para obtener un valor de una tensión de red proporcional (VACâ?) ; y estando dispuesta la central de control electrónico para calcular el valor de la tensión total (VT) proporcionalmente al valor de la tensión de red proporcional (VACâ?) ,
** (Ver fórmula) **
caracterizado por el hecho de que la tensión total (VT) se altera en función de la diferencia entre el valor de una tensión de red proporcional (VACâ?) calculado en un presente ciclo de la tensión de red (VAC) y el valor de la tensión de red proporcional (VACâ?) calculado en el ciclo anterior de la tensión de red (VAC) .
11. Sistema según la reivindicación 10, caracterizado por el hecho de que el primer circuito de detección de tensión (51) se ajusta para medir el primer nivel de tensión de red (VM1) en el instante del paso respectivo por un nivel cero.
12. Sistema según la reivindicación 11, caracterizado por el hecho de que el segundo circuito de detección de tensión (52) se ajusta para medir el segundo nivel de tensión de red (VM2) , estando situado el segundo nivel de tensión de red (VM2) entre el nivel cero de la tensión de red (VAC) y el nivel máximo de la tensión de red (VACM) .
13. Sistema según la reivindicación 12, caracterizado por el hecho de que la central de control electrónico (10) comprende un dispositivo contador de tiempo que compara el lapso de tiempo (tD) entre el evento de la medición de del primer instante de la medición (t10) y el evento de la medición del segundo instante de la medición (t20) con un tiempo predeterminado (tp) y para alterar la tensión total (VT) proporcionalmente al lapso de tiempo (tD) .
14.Sistema según la reivindicación 13, caracterizado por el hecho de que la central de control electrónico (10) está dispuesta para general un valor de una tensión de red proporcional (VACâ?) , siendo valor de tensión (VACâ?) proporcional al valor del lapso de tiempo (tD) , y la central de control electrónico (10) está dispuesta para alterar el valor de la tensión total (VT) a un valor de tensión total corregido (VT) proporcionalmente al valor de la tensión de red proporcional (VACâ?) cuando el lapso de tiempo (tD) es diferente del tiempo preestablecido (tp) .
15.Sistema según la reivindicación 14, caracterizado por el hecho de que la central de control electrónico (10) está dispuesta para elevar el valor de la tensión total (VT) a un valor de tensión total corregida (VT') si el lapso de tiempo (tD) es mayor que el tiempo preestablecido (tp) .
16.Sistema según la reivindicación 15, caracterizado por el hecho de que la central de control electrónico (10) está dispuesta para reducir el valor de la tensión total (VT) a un valor de tensión total corregida (VT') si el lapso de tiempo (tD) es menor que el tiempo preestablecido (tp) .
17. Sistema según la reivindicación 16, caracterizado por el hecho de que la tensión total (VT) alimenta un motor eléctrico de un compresor, comprendiendo el compresor un pistón, comprendiendo la central de control electrónico (10) un valor de tensión definida (Vp) , siendo la tensión definida (Vp) proporcional a un error (EDP) entre una posición de desplazamiento de referencia (DPREF) y un desplazamiento máximo (DPMAX) del pistón, siendo la posición de desplazamiento de referencia (DPREF) proporcional a la posición del pistón en el compresor, y siendo el desplazamiento máximo (DPpMAX) proporcional a un desplazamiento deseable del pistón en el compresor.
18. Sistema según la reivindicación 17, caracterizado por el hecho de que el circuito de generación de señal (50) comprenden un convertidor D/A.
19. Compresor que tiene un sistema caracterizado por el hecho de que comprende un sistema tal como se define en las reivindicaciones 10 a 18.
Patentes similares o relacionadas:
Método para controlar un inversor, del 6 de Mayo de 2020, de LSIS Co., Ltd: Un método para controlar un inversor que realiza una optimización de salida de un motor en una sección por encima de la velocidad […]
Accionadores de válvula, del 26 de Febrero de 2020, de Eaton Intelligent Power Limited: Un accionador de válvula que incluye: un vástago de impulsión para, en uso, ajustar una válvula entre una posición de apertura y una posición de cierre; […]
Procedimiento y dispositivo de regulación y/o control para el funcionamiento de una instalación de energía eólica y/o de un parque, así como instalación de energía eólica y parque eólico, del 16 de Octubre de 2019, de Wobben Properties GmbH: Procedimiento para el funcionamiento de una instalación de energía eólica y/o de un parque eólico para la inyección de potencia eléctrica a una red de alimentación […]
 Dispositivo de generación hidroeléctrica de almacenamiento por bombeo de velocidad variable, del 26 de Junio de 2019, de Hitachi Mitsubishi Hydro Corporation: Un aparato de generación de potencia de almacenamiento por bombeo de velocidad variable que comprende un motor de generador de velocidad variable que […]
Dispositivo de generación hidroeléctrica de almacenamiento por bombeo de velocidad variable, del 26 de Junio de 2019, de Hitachi Mitsubishi Hydro Corporation: Un aparato de generación de potencia de almacenamiento por bombeo de velocidad variable que comprende un motor de generador de velocidad variable que […]
Procedimiento de identificación de la resistencia eléctrica del rotor de un motor eléctrico, del 12 de Junio de 2019, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de identificación de un valor (Rr) de resistencia de un rotor de motor (M) eléctrico de inducción, caracterizado porque comprende las etapas […]
Sistema de control de motor eléctrico de inducción, del 8 de Mayo de 2019, de LSIS Co., Ltd: Un sistema para controlar un motor electrico de induccion en una region de alta velocidad por encima de una velocidad nominal predeterminada, […]
Método para detectar el estado de un cable de alimentación en un sistema inversor, del 3 de Abril de 2019, de LSIS Co., Ltd: Un metodo para detectar los estados de los cables de alimentacion en un sistema inversor que suministra energia generada a partir de un inversor a […]
Aparato para controlar un motor de inducción, del 27 de Febrero de 2019, de LSIS Co., Ltd: Un aparato para controlar una máquina de inducción en un sistema que incluye una primera unidad de determinación configurada para determinar una tensión […]