Procedimiento de control de radios y líneas de estilo de componentes de vehículos automóviles.
Procedimiento de control de líneas de estilo de componentes de vehículos automóviles,
caracterizado por quecomprende:
- seleccionar, en una línea de estilo de un componente (101) del vehículo, al menos un punto de control;
- en un modelo CAD 3D del componente (101) del vehículo, para cada punto de control seccionar la geometría delcomponente (101) con un plano de corte central perpendicular en el punto de control y obtener el centro (402) delarco (403) del componente que pasa por el punto de control y su radio de curvatura R;
- en un modelo CAD 3D del componente (101) del vehículo, creación de una geometría auxiliar comprendiendo, paracada punto de control, la obtención de:
* un cilindro teórico (400) centrado en el centro (402) del arco, con su eje (401) perpendicular al plano de cortecentral y con un radio RT igual al radio R del arco (403);
* una sección central teórica (404) generada por la intersección del plano de corte central con la geometría delcomponente (101);
* dos secciones auxiliares teóricas (405) generadas por la intersección de dos planos de corte paralelos al plano decorte central, y situados a cada lado del mismo a una distancia determinada, con la geometría del componente(101);
* puntos de tangencia teóricos (406) como los extremos del arco (403) que forman parte de la sección central teórica(404);
- realizar un escaneado tridimensional del componente (101) en torno a cada punto de control, obteniendo unconjunto de puntos de medición (106) representativos de las características geométricas tridimensionales delcomponente (101);
- calcular las desviaciones (110) existentes entre las secciones auxiliares de la geometría real (107), siendo dichageometría real (107) obtenida a partir del conjunto de puntos de medición (106) y las secciones auxiliares teóricas(405);
- calcular las desviaciones existentes entre la sección central de la geometría real (107), siendo dicha geometría real(107) obtenida a partir del conjunto de puntos de medición (106) y la sección central teórica (404);
- determinar, a partir de las desviaciones obtenidas anteriormente, un campo de búsqueda (111) en el que serealizará la búsqueda de un cilindro real;
- obtener, a partir del conjunto de puntos de medición (106) dentro del campo de búsqueda, el cilindro real y ladesviación de su radio frente al radio RT del cilindro teórico (400);
- obtener, a partir del cilindro real y del conjunto de puntos de medición (106), los puntos de tangencia reales y ladesviación de los mismos frente a los puntos de tangencia teóricos (406).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10380144.
Solicitante: SEAT, S.A..
Nacionalidad solicitante: España.
Inventor/es: JIMENÉZ MARTÍN,PEDRO, TABLAS RUIZ,Francesc Xavier, LOPEZ RIBERA,Sergio, GOMEZ PONCE,Cristobal José.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D65/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Diseño, fabricación, p.ej. ensamblado o medidas encaminadas a facilitar el desensamblaje o la modificación estructural de vehículos de motor o remolques, no previstos en otro lugar.
- G01B11/24 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de contornos o curvaturas.
- G05B19/418 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
- G06F17/50
- G06T7/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
- G06T7/60 G06T […] › G06T 7/00 Análisis de imagen. › Análisis de los atributos geométricos.
- G07C3/14 G […] › G07 DISPOSITIVOS DE CONTROL. › G07C APARATOS DE CONTROL DE HORARIOS O DE ASISTENCIA; REGISTRO O INDICACION DEL FUNCIONAMIENTO DE LAS MAQUINAS; PRODUCCION DE NUMEROS AL AZAR; APARATOS PARA VOTAR O APARATOS DE LOTERIA; DISPOSICIONES, SISTEMAS O APARATOS PARA CONTROLES NO PREVISTOS EN OTRO LUGAR. › G07C 3/00 Registro o indicación del estado o del funcionamiento de máquinas o de otros aparatos con la exclusión de vehículos. › Sistemas de control de calidad.
PDF original: ES-2397268_T3.pdf
Fragmento de la descripción:
Procedimiento de control de radios y líneas de estilo de componentes de vehículos automóviles Campo de la invención La presente invención se engloba en el sector de la fabricación de piezas de automóviles, y más concretamente, se engloba en los procesos de control de calidad de dichas piezas.
Antecedentes de la invención La medición de características de un producto es divulgada, por ejemplo, en WO9634251.
En el ámbito de la fabricación de componentes de automóviles, existen actualmente problemas con la percepción de las líneas de estilo y radios debido a la falta de continuidad entre elementos exteriores e interiores, ya sean fabricados con la misma tecnología o no, producidas por desviaciones en piezas, por ejemplo entre el parachoques y el lateral o entre la tapa boca de carga combustible con el lateral.
Se hace necesario un proceso de control de líneas de estilo y radios, para garantizar la continuidad entre las diferentes piezas de la carrocería, y que dichas líneas de estilo y radios se encuentren dentro de un rango especificado en la fase de diseño, para de esta forma asegurar que las líneas de estilo y radios en producción corresponden a los aprobados en el proceso de validación del proyecto.
Con la presente invención se consigue crear un proceso para el control de radios de cualquier valor (líneas uniformes) en piezas de todo tipo y con diversa complejidad geométrica (líneas de estilo) , lo cual hasta el momento con las herramientas y procesos actuales sólo podía realizarse sobre grandes radios y con componentes geométricas poco complejas. De esta forma se pueden tomar las decisiones y acciones correctivas sobre el proceso en cualquier fase, garantizando la calidad del producto.
Descripción de la invención La invención se refiere a un proceso de control de radios y líneas de estilo de componentes de automóviles, tales como piezas de la carrocería. El objetivo de la presente invención es controlar sobre una sección típica de línea de estilo de la carrocería de un automóvil o de componentes interiores, los siguientes valores.
-Valor del radio.
- Dimensión de la cuerda del arco y la dispersión de sus puntos de tangencia.
- Posición relativa y absoluta de la línea de estilo. La presente invención pretende obtener, sobre un conjunto de zonas del vehículo a medir, las desviaciones
producidas. Los datos obtenidos también podrán ser utilizados para fijar límites de tolerancias y desviaciones producidas durante el proceso de fabricación. El procedimiento de control comprende las características de la reivindicación 1. El procedimiento de control puede comprender adicionalmente:
- en el modelo 3D del vehículo, obtener para cada punto de control: . un punto medio teorico de la cuerda, siendo el punto medio de los puntos de tangencia teoricos; . un punto medio teorico del arco, siendo el punto central del arco; - obtener, a partir de los puntos de tangencia reales, el punto medio real de la cuerda; - obtener, a partir del cilindro real y el conjunto de puntos de medición, el punto medio real del arco y la desviación
del mismo frente al punto medio teórico. El escaneado tridimensional del componente se realiza preferentemente mediante un escáner láser.
El campo de búsqueda se determina preferiblemente como un volumen cilíndrico definido entre un cilindro de radio RT-DMAX y un cilindro de radio RT+DMAX, siendo DMAX la mayor desviación en valor absoluto producida entre la sección central de la geometría real y la sección central teórica.
El procedimiento de control puede comprender adicionalmente una etapa de optimización del conjunto de puntos de medición, en la cual se posiciona dicho conjunto de puntos en una posición óptima respecto a la geometría del modelo 3D del vehículo mediante el desbloqueo de grados de libertad en función del ángulo que formen el eje del cilindro y los ejes de referencia del vehículo.
El componente del vehículo puede ser un elemento de la carrocería o un componente interior del vehículo.
Breve descripción de los dibujos A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
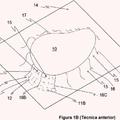
Las Figuras 1A, 1B, 2A y 2B representan ejemplos de definición de puntos de control sobre la carrocería del vehículo, mostrando las Figuras 1B y 2B los detalles en las transiciones entre elementos de la carrocería.
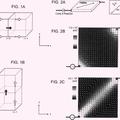
Las Figuras 3A, 3B, 3C y 3D representan un ejemplo de seccionado de la geometría de la carrocería sobre un punto de control definido.
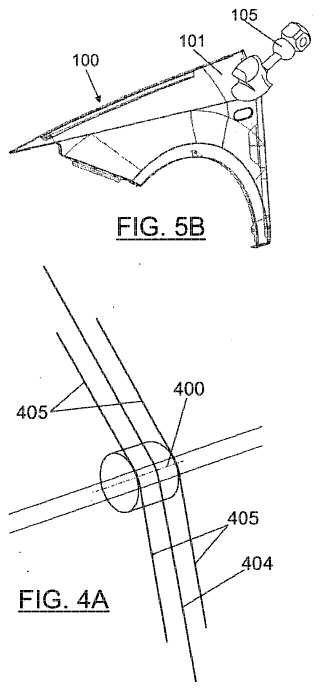
Las Figuras 4A y 4B muestran la generación del cilindro teórico auxiliar, dentro del proceso de definición de valores de los puntos de control.
Las Figuras 5A, 5B, 5C, 5D, 5E y 5F muestran la etapa de medición de la nube de puntos en los puntos de control determinados de la carrocería.
Descripción detallada de la invención El proceso de control de los radios y líneas de estilo comprende las siguientes etapas:
1. Definición de valores (e.g. valores de radios) en los puntos de control.
2. Proceso de medición en los puntos de control.
3. Proceso de cálculo radio y posición.
La primera etapa de definición de valores en los puntos de control comprende a su vez los siguientes pasos:
- Definir los puntos de control sobre los componentes 101 del vehículo según la geometría y características del modelo de vehículo, según se muestra a modo de ejemplo en las Figuras 1A y 2A, considerando en especial las transiciones entre elementos o piezas diferentes de la carrocería (100) , tal y como se muestra en detalle (detalles A y B) en las respectivas Figuras 1B y 2B, aplicándose especialmente el criterio de continuidad entre dos componentes 101 consecutivos de la carrocería (100) . En dichas figuras (1A, 1B, 2A y 2B) se muestran los puntos de control seleccionados entre círculos (puntos 1, 2, 3, etc.) , y las distancias consideradas (d1, d2, d3) entre puntos de control o entre puntos de control y borde de la pieza 101.
- Creación de planos: seccionado de la geometría sobre los puntos definidos para la posterior extracción de datos teóricos. En las Figuras 3A, 3B, 3C y 3D se representa con flechas, a modo de ejemplo, el proceso de seccionado de la geometría del componente (101) de la carrocería mediante un plano de corte central perpendicular a la carrocería en el punto de control número 9, a partir del cual se obtendrá el radio de curvatura R y la longitud de la cuerda L del arco 403 de sus puntos de tangencia. En la Figura 3D se representa las superficies (S1, S2) de la carrocería tangente al arco 403.
- Creación de geometría auxiliar, mostrada en las Figuras 4A y 4B, mediante software 3D para su posterior tratamiento y uso en el proceso de cálculo:
. Cilindro teórico 400: se define un cilindro teórico 400, con eje 401, en el centro 402 del arco sobre la sección de la línea de estilo, teniendo el cilindro un radio RT igual al radio R del arco 403 y siendo su eje 401 perpendicular al plano de corte central de la sección. La longitud del cilindro teórico 400 se define como valor estándar a 3 mm. Este cilindro teórico 400 se utilizará para calcular el valor del radio real de los puntos de control definidos.
. Secciones central teórica 404 y de cálculo: se generan a través de la intersección del plano de corte central (que es perpendicular a la curva en su punto definido) con la geometría de la pieza 101, definiéndose una longitud de curva igual a 15 mm en cada superficie tangente al arco más su sector circular (esto es, una longitud total de 30mm más la longitud del arco 403) . Se emplea el mismo criterio para la sección de cálculo pero con una longitud de 5mm. Estas secciones se utilizarán para obtener el parámetro de cálculo a utilizar para obtener el campo de búsqueda del cilindro real.
La sección central es la sección utilizada para la comprensión del entorno de las superficies tangentes a la línea de estilo, además de poder obtener de ella el valor del parámetro necesario para el posterior cálculo del radio. Esta sección, únicamente debe ser utilizada sobre un proceso de cálculo manual.
La sección de cálculo se define del mismo modo que la anterior, pero con una dimensión diferente, ya que es utilizada exclusivamente para la obtención del parámetro de cálculo y será utilizada sobre un proceso de cálculo vía software automatizado (programación de máquina para cálculo automático) .
. Secciones auxiliares teóricas 405 o complementarias: son generadas igualmente... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de control de líneas de estilo de componentes de vehículos automóviles, caracterizado por que comprende:
- seleccionar, en una línea de estilo de un componente (101) del vehículo, al menos un punto de control;
- en un modelo CAD 3D del componente (101) del vehículo, para cada punto de control seccionar la geometría del componente (101) con un plano de corte central perpendicular en el punto de control y obtener el centro (402) del arco (403) del componente que pasa por el punto de control y su radio de curratura R;
- en un modelo CAD 3D del componente (101) del vehículo, creación de una geometría auxiliar comprendiendo, para cada punto de control, la obtención de:
. un cilindro teorico (400) centrado en el centro (402) del arco, con su eje (401) perpendicular al plano de corte central y con un radio RT igual al radio R del arco (403) ;
. una sección central teórica (404) generada por la intersección del plano de corte central con la geometría del componente (101) ;
. dos secciones auxiliares teóricas (405) generadas por la intersección de dos planos de corte paralelos al plano de corte central, y situados a cada lado del mismo a una distancia determinada, con la geometría del componente (101) ;
. puntos de tangencia teóricos (406) como los extremos del arco (403) que forman parte de la sección central teórica (404) ;
- realizar un escaneado tridimensional del componente (101) en torno a cada punto de control, obteniendo un conjunto de puntos de medición (106) representativos de las características geométricas tridimensionales del componente (101) ;
- calcular las desviaciones (110) existentes entre las secciones auxiliares de la geometría real (107) , siendo dicha geometría real (107) obtenida a partir del conjunto de puntos de medición (106) y las secciones auxiliares teóricas (405) ;
- calcular las desviaciones existentes entre la sección central de la geometría real (107) , siendo dicha geometría real
(107) obtenida a partir del conjunto de puntos de medición (106) y la sección central teórica (404) ;
-determinar, a partir de las desviaciones obtenidas anteriormente, un campo de búsqueda (111) en el que se realizará la búsqueda de un cilindro real;
- obtener, a partir del conjunto de puntos de medición (106) dentro del campo de búsqueda, el cilindro real y la desviación de su radio frente al radio RT del cilindro teórico (400) ;
- obtener, a partir del cilindro real y del conjunto de puntos de medición (106) , los puntos de tangencia reales y la desviación de los mismos frente a los puntos de tangencia teóricos (406) .
2. Procedimiento de control según la reivindicación 1, que comprende adicionalmente:
- en el modelo CAD 3D del vehículo, obtener para cada punto de control:
. un punto medio teorico (408) de la cuerda del arco (403) , siendo el punto medio de los puntos de tangencia teoricos (406) ;
. un punto medio teorico (409) del arco, siendo el punto central del arco (403) ;
- obtener, a partir de los puntos de tangencia reales, el punto medio real de la cuerda;
- obtener, a partir del cilindro real y el conjunto de puntos de medición (106) , el punto medio real del arco y la desviación del mismo frente al punto medio teórico (409) .
3. Procedimiento de control según cualquiera de las reivindicaciones anteriores, donde el escaneado tridimensional del componente (101) se realiza mediante un escáner láser (105) .
4. Procedimiento de control según cualquiera de las reivindicaciones anteriores, donde el campo de búsqueda (111) se determina como un volumen cilíndrico definido entre un cilindro de radio RT-DMAX y un cilindro de radio RT+DMAX 5 con sus respectivos ejes coincidiendo con el eje del cilindro teórico (400) , siendo DMAX la mayor desviación en valor absoluto producida entre la sección central de la geometría real (107) y la sección central teórica (404) .
5. Procedimiento de control según cualquiera de las reivindicaciones anteriores, que comprende adicionalmente una etapa de optimización del conjunto de puntos de medición (106) , en la cual se posiciona dicho conjunto de puntos en una posición óptima respecto a la geometría del modelo CAD 3D del vehículo mediante el desbloqueo de grados de libertad en función del ángulo que formen el eje del cilindro y los ejes de referencia del vehículo.
6. Procedimiento de control según cualquiera de las reivindicaciones anteriores, donde el componente (101) del vehículo se selecciona entre los siguientes: un elemento de la carrocería (100) ; un componente interior del rehiculo.
Patentes similares o relacionadas:
MÉTODO PARA LA OBTENCIÓN DE UN MODELO FÍSICO DE UN OBJETO TRIDIMENSIONAL A PARTIR DE SUPERFICIES DESARROLLABLES Y MODELO FÍSICO ASÍ OBTENIDO, del 2 de Abril de 2020, de UNIVERSIDAD NACIONAL DE COLOMBIA: La presente invención se relaciona con un método para obtener un modelo físico de un objeto tridimensional a partir de un modelo digital de […]
Reconstrucción ósea e implantes ortopédicos, del 12 de Junio de 2019, de Mahfouz, Mohamed Rashwan: Procedimiento de diseño de un implante ortopédico específico para el paciente, en el que el procedimiento comprende: comparar un modelo […]
 Diseño de sobrante sin secciones, del 31 de Mayo de 2019, de Hexagon Manufacturing Intelligence Canada Limited: Un método para el diseño de un sobrante , en donde todo o parte del sobrante se diseña con un enfoque sin secciones, que comprende las etapas de: introducir […]
Diseño de sobrante sin secciones, del 31 de Mayo de 2019, de Hexagon Manufacturing Intelligence Canada Limited: Un método para el diseño de un sobrante , en donde todo o parte del sobrante se diseña con un enfoque sin secciones, que comprende las etapas de: introducir […]
MÉTODO IMPLEMENTADO POR ORDENADOR PARA GENERAR UN MODELO NUMÉRICO DE REPRESENTACIÓN DE UN NÚCLEO MAGNÉTICO PARA UN ELEMENTO DE INDUCCIÓN MAGNÉTICA, del 23 de Mayo de 2019, de SP CONTROL TECHNOLOGIES, S.L: La presente invención es una invención implementada en ordenador que comprende un método para generar un modelo numérico de representación de un […]
Procedimiento de simulación del funcionamiento de un circuito electrónico y programa, del 22 de Mayo de 2019, de Sorbonne Université: Procedimiento de simulación del funcionamiento de un circuito electrónico implementado por ordenador, comprendiendo el circuito electrónico […]
Método de predicción de fractura, dispositivo de procesamiento de cálculo, programa y soporte de registro, del 8 de Mayo de 2019, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un método implementado por ordenador para predecir una fractura en una parte de objetivo de análisis en un proceso de formación, que comprende: un […]
Método, dispositivo, programa y soporte de registro del análisis de la causa de la retracción, del 8 de Mayo de 2019, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un método implementado por ordenador para analizar una causa de la retracción en un producto formado que es formado a presión a partir de una placa […]
 Métodos de análisis de campos electromagnéticos para materiales conductores anisotrópicos, del 26 de Abril de 2019, de Subaru Corporation: Un método de análisis del campo electromagnético para un material conductor anisotrópico, en el que el método de análisis del campo electromagnético utiliza […]
Métodos de análisis de campos electromagnéticos para materiales conductores anisotrópicos, del 26 de Abril de 2019, de Subaru Corporation: Un método de análisis del campo electromagnético para un material conductor anisotrópico, en el que el método de análisis del campo electromagnético utiliza […]