Procedimiento para el control de un detector de presencia, y detector de presencia correspondiente.
Procedimiento para el control de una aplicación eléctrica, en particular de una fuente luminosa (18),
con undetector de presencia (20), que comprende las etapas de:
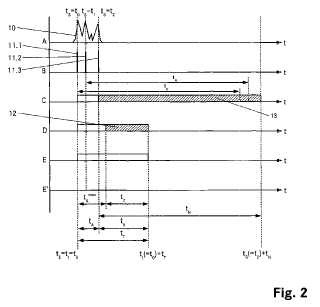
a) determinar señales de disparo (11.1 - 11.5) para el control de una corriente de carga (51) mediante lapreparación y conversión de señales de movimiento (A) detectadas en el detector de presencia comoconsecuencia de una presencia en una zona de cobertura del detector de presencia (20);
b) conectar una corriente de carga (51) en función de parámetros de sistema definidos por el usuario y/oestablecidos previamente y/o parámetros de entorno medidos debido a una señal de disparo (11.1)determinada en primer lugar tras un periodo de ausencia;
c) establecer un valor de inicio (tS) actual de un temporizador (30) para un tiempo de retardo (13) concada señal de disparo (11.1 - 11.5) determinada, desconectándose la corriente de carga (51) alfinalizar el tiempo de retardo (13) en caso de no producirse señales de disparo subsiguientes, siempreque está conectada;
caracterizado por las etapas de
d) determinar una duración de estancia (tA) supuesta debido a las señales de disparo (11.1 - 11.5)determinadas durante un intervalo de prueba (tT) desencadenado por la señal de disparo (11.1)determinada en primer lugar al finalizar el intervalo de prueba (tT), siendo el intervalo de prueba (tT)más corto que la duración (tN) del tiempo de retardo (13);
e) comparar la duración de estancia (tA) supuesta determinada con una duración de estancia máxima(tAmax) que puede establecerse previamente;
f) desconectar la corriente de carga (51) al finalizar el intervalo de prueba (tT), siempre que estéconectada y siempre que la duración de presencia (tA) supuesta sea menor que la duración depresencia máxima (tAmax).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11405215.
Solicitante: Theben HTS AG.
Nacionalidad solicitante: Suiza.
Dirección: Im Langhag 11 8307 Effretikon SUIZA.
Inventor/es: BLUMER,FRITZ.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H05B37/02
PDF original: ES-2391084_T3.pdf
Fragmento de la descripción:
Procedimiento para el control de un detector de presencia, y detector de presencia correspondiente
Campo técnico
La invención se refiere a un procedimiento para el control de una aplicación eléctrica, en particular de una fuente luminosa, con un detector de presencia, que comprende las etapas de
a) determinar señales de disparo para el control de una corriente de carga mediante la preparación y conversión de señales de movimiento detectadas en el detector de presencia como consecuencia de una presencia en una zona de cobertura del detector de presencia;
b) conectar una corriente de carga en función de parámetros de sistema definidos por el usuario y/o establecidos previamente y/o parámetros de entorno medidos debido a una señal de disparo determinada en primer lugar tras un periodo de ausencia;
c) establecer un valor de inicio actual de un temporizador para un tiempo de retardo con cada señal de disparo determinada, desconectándose la corriente de carga al finalizar el tiempo de retardo en caso de no producirse señales de disparo subsiguientes, siempre que esté desconectada.
Estado de la técnica
Los detectores de presencia que funcionan por ejemplo según el principio de la técnica de infrarrojos pasivos existen en numerosas formas de realización en el mercado. Miden y comparan la radiación infrarroja en su zona de cobertura, sin embargo no emiten radiación en sí mismos, por lo que se denominan pasivos. Un detector de presencia es una unidad de control electrónica que con su sistema óptico/sistema de sensores detecta la radiación térmica infrarroja invisible por ejemplo de seres vivos, en particular de personas, y en caso de una fuente térmica que se mueve en su zona de cobertura genera una señal de control para una unidad de conexión para una corriente de carga. A este respecto la unidad de conexión puede formar parte del detector de presencia o activarse como unidad externa por el detector de presencia. Como elementos de conexión para conectar la corriente de carga pueden emplearse por ejemplo relés o triacs.
Los sensores para la detección de la radiación infrarroja están configurados preferiblemente de modo que pueda determinarse la radiación IR de un ser vivo (es decir una alteración del campo de radiación térmica) y emitirse como señal de movimiento. En principio puede emplearse cualquier tipo de sensores para la detección de radiación IR. Para una realización del detector de presencia como detector de presencia IR pasivo se prefieren sensores piroeléctricos. Los sensores pueden comprender para mediciones diferenciales, por ejemplo, dos sensores o un sensor dividido en dos partes, por ejemplo, para poder detectar movimientos de una fuente IR.
En el detector de movimiento puede ajustarse un retraso temporal (tiempo de retardo) que corresponde al tiempo de conexión de cualquier aplicación, por ejemplo de una o varias fuentes luminosas eléctricas, tras el último movimiento. El tiempo de retardo es necesario para que, por ejemplo, en caso de interrupciones en la captación de movimiento (cuando la persona que va a detectarse sólo se mueve de vez en cuando) , la luz no se desconecte inmediatamente. Con cada señal de disparo preparada a partir de una señal de movimiento empieza de nuevo el transcurso de tiempo completo para el tiempo de retardo. Cuando hay constantemente movimiento, el tiempo de retardo se dispara constantemente de nuevo y la iluminación queda conectada. Si ya no se captan movimientos, entonces la corriente de carga aún queda conectada durante el tiempo de retardo y se desconecta al finalizar el tiempo de retardo.
Los detectores de presencia de este tipo tienen el inconveniente de que la luz queda conectada durante todo el tiempo de retardo, incluso si la presencia de la persona en la región espacial vigilada es o fue de poca duración. No en último término por motivos energéticos es por tanto necesario mejorar esta situación.
El documento CH 683 473 A5 (Bodmer) describe un detector de movimiento en el que el tiempo de retardo se adapta de forma automática y continua a una frecuencia o a un patrón de tiempo de las señales de movimiento detectadas y se ajusta de nuevo para desconectar la iluminación.
Sin embargo, los detectores de movimiento de este tipo tienen el inconveniente de que la adaptación del tiempo de retardo se basa en valores de experiencia a partir de una frecuencia de disparo en periodos de medición consecutivos. En general el tiempo de retardo para el siguiente periodo de medición se determina a partir de intervalos de disparo del periodo de medición anterior. Es cierto que está prevista una adaptación del tiempo de retardo con respecto al periodo de medición actual. Sin embargo, esta adaptación sólo permite una prolongación del tiempo de retardo para el caso de grandes intervalos de disparo. Sin embargo, para evitar que la luz no quede
conectada durante todo el tiempo de retardo también en casos excepcionales en caso de una presencia sólo breve, es necesario proporcionar un detector de presencia que pueda reaccionar inmediatamente frente a presencias breves.
El documento US 2006/125624 A1 describe un procedimiento para el control de fuentes luminosas en un espacio con un detector de presencia PIR. Para ahorrar energía el procedimiento presenta un tiempo de retardo, tras el cual se desconecta la luz si no se detectan señales de presencia. En caso de una señal de presencia determinada en primer lugar se desencadena un tiempo de retardo muy corto. Sin embargo, siempre que se determinen señales de presencia de forma continua, el procedimiento pasa a un modo de funcionamiento básico en el que el tiempo de retardo se determina en primer lugar según un valor establecido previamente. En función de la frecuencia y de la magnitud de las señales de presencia como consecuencia el tiempo de retardo se adapta de forma adaptiva. Según la duración de la señal de presencia determinada en último lugar ésta se clasifica en una de dos clases y de manera correspondiente el tiempo de retardo o se adapta (con señales de presencia pequeñas) o se mantiene (con grandes señales de presencia) . En caso de pequeñas señales de presencia el tiempo de retardo se aumenta en función de un intervalo de tiempo de las dos señales de presencia determinadas en último lugar (intervalo mayor que el 75% del tiempo de retardo actual) o se acorta (intervalo menor que el 25% del tiempo de retardo actual) . A este respecto se define un posible tiempo de retardo mínimo y uno máximo.
El documento EP 1 31 142 A1 describe un procedimiento para el control de una pluralidad de actuadores existentes en un espacio con un sensor PIR que detecta señales de movimiento en el espacio. El procedimiento comprende un tiempo de retardo que se desencadena con cada señal de movimiento detectada y durante el que los actuadores permanecen activados. Al finalizar el tiempo de retardo se restablecen o desconectan los actuadores. El tiempo de retardo (LtN) se establece de nuevo al finalizar un periodo de vigilancia (τN) . El periodo de vigilancia puede corresponder al tiempo de retardo ajustado en último lugar o puede seleccionarse para ser constante. El nuevo tiempo de retardo se ajusta en función del número de los acontecimientos de movimiento establecidos en el último periodo de vigilancia, ajustándose un tiempo de retardo corto si se detecta una tasa de movimiento elevada y ajustándose un tiempo de retardo largo si la frecuencia de los movimientos detectados es baja.
El documento US 6.151.529 A1 describe un sistema para el control de corrientes de carga para consumidores, que comprende un detector de presencia PIR que en función de los movimientos detectados genera señales de movimiento. El sistema comprende un control, en el que como parámetros se usan un tiempo de retardo ajustable (“motion sensor time out value” - MTV (valor de expiración de sensor de movimiento) en el intervalo de 1-30 minutos así como un tiempo de retardo estándar de 15 minutos (“default time-out” - default TO (tiempo de expiración por defecto) ) . Además, un usuario puede establecer previamente un tiempo de retardo en el intervalo de 0-60 minutos (UST) . El control comprende un modo adaptivo en el que se prolonga automáticamente el UST debido a valores de experiencia y parámetros previamente establecidos (“adjusted UST” (UST ajustado) ) . En particular se prolonga el tiempo de retardo debido a una duración media determinada estadísticamente entre dos señales... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el control de una aplicación eléctrica, en particular de una fuente luminosa (18) , con un detector de presencia (20) , que comprende las etapas de: 5
a) determinar señales de disparo (11.1 – 11.5) para el control de una corriente de carga (51) mediante la preparación y conversión de señales de movimiento (A) detectadas en el detector de presencia como consecuencia de una presencia en una zona de cobertura del detector de presencia (20) ;
b) conectar una corriente de carga (51) en función de parámetros de sistema definidos por el usuario y/o establecidos previamente y/o parámetros de entorno medidos debido a una señal de disparo (11.1) determinada en primer lugar tras un periodo de ausencia;
c) establecer un valor de inicio (tS) actual de un temporizador (30) para un tiempo de retardo (13) con
cada señal de disparo (11.1 – 11.5) determinada, desconectándose la corriente de carga (51) al finalizar el tiempo de retardo (13) en caso de no producirse señales de disparo subsiguientes, siempre que está conectada;
caracterizado por las etapas de
d) determinar una duración de estancia (tA) supuesta debido a las señales de disparo (11.1 – 11.5) determinadas durante un intervalo de prueba (tT) desencadenado por la señal de disparo (11.1) determinada en primer lugar al finalizar el intervalo de prueba (tT) , siendo el intervalo de prueba (tT) más corto que la duración (tN) del tiempo de retardo (13) ;
e) comparar la duración de estancia (tA) supuesta determinada con una duración de estancia máxima (tAmax) que puede establecerse previamente;
f) desconectar la corriente de carga (51) al finalizar el intervalo de prueba (tT) , siempre que esté 30 conectada y siempre que la duración de presencia (tA) supuesta sea menor que la duración de presencia máxima (tAmax) .
2. Procedimiento según la reivindicación 1, caracterizado porque para determinar la duración de estancia (tA) supuesta se determina un intervalo de tiempo (tX) desde una señal de disparo (11.3, 11.5) determinada en
último lugar y para comparar la duración de estancia (tA) supuesta con la duración de estancia máxima (tAmax) se compara el intervalo de tiempo (tX) determinado con la diferencia entre el intervalo de prueba (tT) y la duración de presencia máxima (tAmax) .
3. Procedimiento según la reivindicación 2, caracterizado porque para determinar el intervalo de tiempo (tX) 40 desde la señal de disparo (11.3, 11.5) determinada en último lugar se lee el estado actual del temporizador
(30) y se forma la diferencia entre el estado actual leído del temporizador (30) y el valor de inicio (tS) actual del tiempo de retardo (13) .
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque el intervalo de prueba (tT) es 45 de 120 segundos y la duración de presencia máxima (tAmax) asciende preferiblemente a 30 segundos.
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado porque los parámetros de entorno comprenden una luminosidad real (17) que indica una luminosidad medida actualmente en la zona de cobertura, y porque los parámetros de sistema comprenden una luminosidad teórica que corresponde a una
50 luminosidad deseada que puede establecerse previamente.
6. Procedimiento según la reivindicación 5, caracterizado porque la corriente de carga (51) en el momento de la señal de disparo (11.1) determinada en primer lugar, sólo se conecta si la luminosidad real (17) es menor que la luminosidad teórica.
7. Procedimiento según la reivindicación 5, caracterizado porque los parámetros de sistema comprenden una luminosidad mínima, que es menor que la luminosidad teórica, comparándose en el momento de la señal de disparo (11.1) determinada en primer lugar, la luminosidad real (17) con la luminosidad mínima y conectándose la corriente de carga (51) sólo si la luminosidad real (17) es menor que la luminosidad
60 mínima.
8. Procedimiento según la reivindicación 7, caracterizado porque la luminosidad mínima se obtiene como fracción de la luminosidad teórica definida por el usuario, ascendiendo la luminosidad mínima preferiblemente al 80% de la luminosidad teórica.
9. Procedimiento según una de las reivindicaciones 6 a 8, caracterizado porque en caso de que la duración de presencia (tA) supuesta sea mayor que la duración de presencia máxima (tAmax) , la corriente de carga
(51) se conecta al finalizar el intervalo de prueba (tT) , siempre que la luminosidad real (17) en este momento 5 sea menor que la luminosidad teórica y la corriente de carga (51) esté desconectada.
10. Procedimiento según las reivindicaciones 1 a 9, caracterizado porque durante todo el intervalo de prueba (tT) se analiza la frecuencia de las señales de disparo (11.1 – 11.5) y en caso de superar una frecuencia umbral que puede establecerse previamente la corriente de carga (51) se conecta, en particular ya antes de
finalizar el intervalo de prueba (tT) , en función de parámetros de sistema definidos por el usuario y/o establecidos previamente y/o parámetros de entorno medidos, siempre que esté desconectada.
11. Detector de presencia para el control de una aplicación eléctrica, en particular de una fuente luminosa (18) , debido a movimientos de personas en una zona de cobertura con una unidad de detección (25) para 15 detectar señales de movimiento (A) generadas por el movimiento de una persona, y una unidad de procesamiento (35) , que puede preparar las señales de movimiento (A) y convertirlas en señales de disparo (B) , existiendo un temporizador (30) para proporcionar una señal de tiempo y una unidad de almacenamiento (45) para almacenar parámetros de sistema tales como la luminosidad teórica y/o la luminosidad mínima, y una unidad de control (40) programable, que debido a las señales de disparo (B) , la
señal de tiempo de los parámetros de sistema y dado el caso parámetros de entorno recibidos mediante sensores adicionales, proporciona una señal de control para una unidad de conexión (50) para conectar una corriente de carga (51) caracterizado porque la unidad de control (40) está configurada y programada para realizar el procedimiento según una de las reivindicaciones 1 a 10.
Patentes similares o relacionadas:
Método y aparato para controlar una carga, del 24 de Junio de 2020, de Switchbee Ltd: Un dispositivo que tiene dos terminales conectables en serie a una fuente de alimentación de CA y una carga para conmutar una señal de alimentación […]
Configuración automática de una iluminación, del 20 de Mayo de 2020, de Signify Holding B.V: Una lámpara para ser usada en un sistema de iluminación, comprendiendo la lámpara - una fuente de luz , - una unidad de comunicación adaptada […]
Sistema de iluminación interactivo, del 13 de Mayo de 2020, de Signify Holding B.V: Un sistema de iluminación para proporcionar un patrón de iluminación particular a partir de un conjunto predeterminado de patrones de iluminación, […]
Cadenas de luz divisibles y métodos para dividir cadenas de luz, del 13 de Mayo de 2020, de Signify Holding B.V: Una red de iluminación que incluye al menos una primera unidad de iluminación , comprendiendo la primera unidad de […]
Control de iluminación usando la distribución espacial de los usuarios, del 6 de Mayo de 2020, de Signify Holding B.V: Equipo para poner en servicio automáticamente un sistema de iluminación que comprende una pluralidad de luminarias para iluminar una o más regiones dentro de un […]
Dispositivo de iluminación con dos interfaces, del 22 de Abril de 2020, de PHOENIX CONTACT GMBH & CO. KG: Dispositivo de iluminación , con una primera interfaz para la alimentación de energía al dispositivo de iluminación con energía eléctrica, […]
Redes de iluminación distribuidas, del 26 de Febrero de 2020, de Schreder S.A: Método para establecer una red de iluminación distribuida , comprendiendo la red de iluminación distribuida : · una pluralidad […]
Aparato de luz así como adaptador y red para el control inalámbrico del aparato de luz, del 12 de Febrero de 2020, de Trilux GmbH & Co. KG: Aparato de luz con adaptador para el control del aparato de luz, en donde el adaptador incluye: un módulo de red […]