Procedimiento para el control de un accionamiento híbrido en un vehículo ferroviario.
Procedimiento para el control de un accionamiento híbrido en un vehículo ferroviario,
en el que se predeterminaun itinerario electrónico (SPL) como velocidades relacionadas con las secciones del recorrido a través de un aparatode control del tren (2), se calculan por predicción antes del inicio de la marcha tipos de accionamiento (AA),relacionados con las secciones del recorrido, del vehículo ferroviario por medio del itinerario electrónico (SPL) através de un modelo (9), en el que a través del modelo (9) se determinan las variables teóricas del sistema (SG(SL))del accionamiento híbrido, en el que en la operación de la marcha se calcula una desviación (ds) de as variablesreales del sistema (SG(IST)) con respecto a las variables teóricas del sistema (SG(SL)), en el que con la ayuda de ladesviación (ds) se decide si el modelo (9) es entrenado por medio de las variables reales del sistema (SG(IST)), enel que en la operación de la marcha se determina una desviación de la posición (dPOS) de la posición real(POS(IST)) con respecto a una posición teórica (POS(SL)) calculada a partir del itinerario electrónico (SPL) delvehículo ferroviario, con la ayuda de la desviación de la posición (dPOS) se calcula una reserva de tiempo (tRES) yen el que en función de la reserva de tiempo (tRES) se mantiene o se cambia el tipo de accionamiento actual (AA).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/005450.
Solicitante: MTU FRIEDRICHSHAFEN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Maybachplatz 1 88045 Friedrichshafen ALEMANIA.
Inventor/es: LEHMANN,INGO, BOTTLANG,HOLGER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B61L3/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61L CONTROL DE TRAFICO FERROVIARIO; SEGURIDAD DEL TRAFICO FERROVIARIO (frenos o equipos auxiliares B61H, B61K; estructura de sistemas de agujas E01B). › Dispositivos a lo largo de la vía que mandan dispositivos sobre el vehículo o sobre el tren, p. ej. para soltar los frenos, para maniobrar una señal de alarma.
PDF original: ES-2389696_T3.pdf
Fragmento de la descripción:
Procedimiento para el control de un accionamiento híbrido en un vehículo ferroviario
La invención se refiere a un procedimiento para el control de un accionamiento híbrido en un vehículo ferroviario, en el que se prevé un plano electrónico de itinerarios como velocidades relacionadas con las secciones del recorrido a través de un aparato de control del tren.
En un procedimiento, conocido a partir del documento DE 102 26 143 B4, para el control de un accionamiento híbrido, se propone el tipo de accionamiento por una estrategia de operación de la marcha. La estrategia de operación de la marcha propuesta se considera aplicada cuando el conductor no
Interviene en el sistema. En cambio, si el conductor activa durante corto espacio de tiempo el pedal del acelerador o el pedal del freno, entonces se anula la estrategia de operación de la marcha propuesta y se calcula una nueva estrategia de operación de la marcha. Esto se realiza hasta que se alcanza un estado estacionario, en el que no aparecen ya otras modificaciones de corta duración. La estrategia de operación de la marcha se determina con la ayuda de un perfil de energía, por ejemplo con relación al consumo y a la necesidad de tiempo. El perfil de energía se calcula de nuevo a partir de los datos del conductor, del vehículo, de los trayectos de circulación y de las condiciones atmosféricas así como a partir de datos específicos del conductor. Los datos de los trayectos de circulación son introducidos desde un mapa digital de recorridos con indicación de la altura o por un GPS. A través de un sistema RDS-TMC debe adaptarse el perfil de la energía a condiciones modificadas previsibles del recorrido del tráfico o condiciones del tráfico, por ejemplo atasco. No obstante, no se dan más explicaciones para la aplicación. El procedimiento propuesto está dirigido a un automóvil y al establecimiento en último término determinando del tipo de accionamiento a través del conductor, con lo que es difícil estimar el ahorro de combustible.
Se conoce a partir del documento DD 129 761 PS un procedimiento para el control del tren ahorrando energía en el tráfico de cercanías. En este procedimiento, suponiendo que se mantienen los horarios, se calculan de antemano diferentes trayectorias en función del recorrido y se registran en una memoria fija en función del tiempo y de la sección del recorrido de manera que se pueden llamar. La selección de la trayectoria adecuada se realiza con la ayuda de una reserva de tiempo. En este procedimiento no se tienen en cuenta todavía las posibilidades que ofrece un vehículo ferroviario con accionamiento híbrido.
El documento US 2008/0125924 A1 describe procedimientos para un vehículo ferroviario, en el que a través de un cálculo se calcula un horario óptimo con consumo mínimo de combustible y emisiones mínimas. El cálculo se realiza con la ayuda de un modelo seleccionado, que describe el comportamiento del vehículo ferroviario, y con la ayuda de un reconocimiento de la posición. Tampoco en este procedimiento se tienen en cuenta todavía las posibilidades, que ofrece un vehículo ferroviario con accionamiento híbrido.
La invención tiene el cometido de preparar un procedimiento para el control de un accionamiento híbrido en un vehículo ferroviario, que tiene en cuenta las condiciones marco de este sistema de tráfico también en lo que se refiere a los costes.
La invención soluciona este cometido por medio de un procedimiento con las características de la reivindicación 1. Las configuraciones se representan en las reivindicaciones dependientes.
Las condiciones marco en el funcionamiento de un vehículo ferroviario se predetermina por medio del itinerario electrónico que – como se conoce – se inscribe antes del inicio de la marcha a través de radio transmisión direccional en el aparato de control del tren. En el itinerario electrónico están depositadas las velocidades relacionadas con las secciones del recorrido y, por lo tanto, también el marco de tiempo entre dos puntos del trayecto. El procedimiento consiste ahora en que antes del inicio de la marcha se establecen por predicción los tipos de funcionamiento, relacionados con las secciones del recorrido, del vehículo ferroviario por medio del itinerario electrónico. En la operación de marcha se determina entonces una desviación de la posición real con respecto a una posición teórica del vehículo ferroviario calculada a partir del itinerario electrónico. A partir de la desviación de la posición se calcula de nuevo una reserva de tiempo. Con la ayuda de la reserva de tiempo se mantiene o se cambia entonces el tipo de accionamiento. Por ejemplo, en el caso de una reserva de tiempo negativa en el sentido de un retraso se cambia a un tipo de accionamiento con cesión más elevada de la potencia.
Por razones de seguridad, antes de la activación del tipo de accionamiento de cesión más elevada de energía, se verifica si la velocidad previsible varía en una medida significativa de la velocidad, que está definida a través del itinerario electrónico. En el caso de una desviación significativa, debe concederse en primer lugar a través del puesto de mando una autorización, por ejemplo proporcionando un itinerario electrónico modificado. Esta consideración se aplica para el caso de que deba iniciarse un tipo de accionamiento con menor cesión de potencia.
Para la determinación por predicción de los tipos de funcionamiento relacionados con las secciones del recorrido antes del inicio de la marcha se utiliza un modelo correspondiente como observador predictivo. A través de este
modelo se determinan de la misma manera las variables teóricas del sistema del accionamiento híbrido, por ejemplo una potencia teórica del motor. Durante la operación de la marcha se inscriben las variables reales del sistema y se calcula una desviación de las variables reales con respecto a las variables teóricas del sistema. A través de la consideración de un valor límite se decide entonces si no se realiza ninguna intervención en el sistema o si el modelo es entrenado por medio de las variables reales del sistema. La variable de salida del modelo se determina a través de una optimización y un algoritmo de cálculo, por ejemplo por medio de un principio Maximum según Pontrjagin y por medio de la programación dinámica según Bellman. Como otra medida de seguridad está previsto que el modelo sea supervisado por una gestión de la seguridad. La gestión de la seguridad verifica las variables de entrada, la variable de salida y los parámetros internos del modelo. Puesto que el estado de carga del acumulador de energía eléctrica, que está constituido, por ejemplo, por varios acumuladores de iones de litio (Super-Caps) , es crítico para la seguridad, se supervisa este estado y en el caso de valores no factibles, se desactiva el acumulador de energía de forma gradual o completa.
La regulación predictiva pertenece a la clase de los procedimientos de regulación basados en modelo y permite una previsión del futuro, el llamado horizonte de predicción. La idea central de la invención es la utilización del itinerario electrónico, que utiliza en toda su extensión, en combinación con un perfil de altura como procedimiento de predicción de una manera ventajosa el potencial de ahorro de combustible. Es decir, que se reduce al mínimo la energía empleada a través de la regulación predictiva. Por lo tanto, se reducen los costes operativos para el operador. Evidentemente, el modelo ofrece también la posibilidad de detectar un patrón de comportamiento individual del conductor del vehículo ferroviario y se registrarlo en memoria. Cuando se recorre el mismo recorrido con el mismo conductor del vehículo ferroviario se puede recurrir entonces al mismo patrón de comportamiento individual.
En las figuras se representa un ejemplo de realización preferido. En este caso:
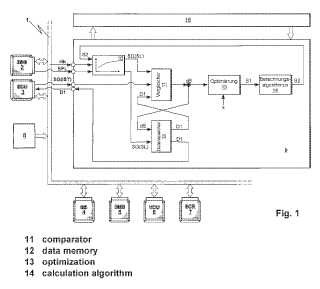
La figura 1 muestra una estructura de información como diagrama de bloques.
La figura 2 muestra un programa de horarios.
La figura 3 muestra un primer sub-programa UP1 y
La figura 4 muestra un segundo sub-programa UP2.
La figura 1 muestra la estructura de información de un accionamiento híbrido para un vehículo ferroviario como diagrama de bloques. Típicamente, un accionamiento híbrido comprende un motor de combustión interna, un motor eléctrico, una caja de cambios, convertidores eléctricos y un acumulador de energía eléctrica, por ejemplo... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el control de un accionamiento híbrido en un vehículo ferroviario, en el que se predetermina un itinerario electrónico (SPL) como velocidades relacionadas con las secciones del recorrido a través de un aparato de control del tren (2) , se calculan por predicción antes del inicio de la marcha tipos de accionamiento (AA) , relacionados con las secciones del recorrido, del vehículo ferroviario por medio del itinerario electrónico (SPL) a través de un modelo (9) , en el que a través del modelo (9) se determinan las variables teóricas del sistema (SG (SL) ) del accionamiento híbrido, en el que en la operación de la marcha se calcula una desviación (ds) de as variables reales del sistema (SG (IST) ) con respecto a las variables teóricas del sistema (SG (SL) ) , en el que con la ayuda de la desviación (ds) se decide si el modelo (9) es entrenado por medio de las variables reales del sistema (SG (IST) ) , en el que en la operación de la marcha se determina una desviación de la posición (dPOS) de la posición real (POS (IST) ) con respecto a una posición teórica (POS (SL) ) calculada a partir del itinerario electrónico (SPL) del vehículo ferroviario, con la ayuda de la desviación de la posición (dPOS) se calcula una reserva de tiempo (tRES) y en el que en función de la reserva de tiempo (tRES) se mantiene o se cambia el tipo de accionamiento actual (AA) .
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque en el caso de una reserva de tiempo negativa (tRES) en el sentido de un retraso en un tipo de accionamiento (AA1) se cambia a un tipo de accionamiento con cesión más elevada de potencia, en el caso de una reserva de tiempo (tRES) dentro de una banda de tolerancia (TB) , se mantiene el tipo de accionamiento (AA) y en el caso de una reserva de tiempo positiva (tRES) en el sentido de una llegada prematura, se cambia a un tipo de accionamiento (AA2) con consumo mínimo de energía.
3. Procedimiento de acuerdo con la reivindicación 2, caracterizado porque en el tipo de accionamiento (AA1) con elevada cesión de potencia o con consumo mínimo de energía (AA2) se cambia después de la autorización a través de un puesto de mando o después de la autorización de un itinerario electrónico modificado (SPLm) .
4. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque antes del inicio de la marcha, se calculan por predicción los tipos de funcionamiento (AA) relacionados con las secciones del recorrido y las variables teóricas del sistema (SG (SL) ) del accionamiento híbrido a través del modelo (9) con la ayuda del itinerario electrónico (SPL) , de un perfil de altura y de las condiciones del medio ambiente.
5. Procedimiento de acuerdo con la reivindicación 4, caracterizado porque no se realiza ninguna intervención en el sistema cuando la desviación (dS) de las variables reales del sistema (SG (IST) ) con respecto a las variables teóricas del sistema (SG (SL) ) y menor que el valor límite (GW) y en el caso de una desviación (dS) mayor que un valor límite (GW) se adapta el modelo (9) por medio de las variables reales del sistema (SG (IST) ) .
6. Procedimiento de acuerdo con la reivindicación 5, caracterizado porque el modelo (9) se adapta por medio de un algoritmo de cálculo (14) predeterminado, en particular por medio del método de Levenberg-Marquart o linealización de Carleman o el procedimiento de Neider-Mead.
7. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el modelo (9) es supervisado por una gestión de la seguridad (15) .
8. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el acumulador de energía eléctrica es verificado en cuanto a la factibilidad con relación al estado de carga, la temperatura, la cesión de corriente así como el nivel de la tensión.
9. Procedimiento de acuerdo con la reivindicación 8, caracterizado porque en el caso de un estado no factible del acumulador de energía eléctrica, se desactiva de manera gradual o completa.
Patentes similares o relacionadas:
Sistema y procedimiento para el acoplamiento / desacoplamiento de vehículos guiados en movimiento durante el funcionamiento, del 1 de Julio de 2020, de Siemens Rail Automation S.A.U: Procedimiento para el acoplamiento / desacoplamiento de una unidad de vehículo guiado A2 a/de una unidad de vehículo guiado A1, mientras que dichas unidades de vehículos guiados […]
Procedimiento y dispositivo para la determinación de un valor de freno seguro de un vehículo ferroviario, del 27 de Mayo de 2020, de Siemens Mobility GmbH: Procedimiento para la determinación de un valor de freno seguro de un vehículo ferroviario, que es representativo de una capacidad de frenado en un instante […]
Dispositivo de ayuda a la conducción para un vehículo ferroviario, que comprende medios progresivos de indicación de instrucciones, del 1 de Abril de 2020, de ALSTOM Transport Technologies: Dispositivo de ayuda a la conducción para un vehículo ferroviario, que comprende medios de determinación de una velocidad objeto (Vc), que incluye: […]
Procedimiento para el funcionamiento de vehículos guiados sobre raíles, del 11 de Marzo de 2020, de Siemens Mobility GmbH: Procedimiento para el funcionamiento de vehículos guiados sobre raíles , en donde - entre un primer vehículo guiado sobre raíles y un segundo vehículo […]
Dispositivo de optimización de la conducción de un vehículo ferroviario, del 4 de Diciembre de 2019, de ALSTOM Transport Technologies: Dispositivo para optimizar la conducción de un vehículo ferroviario, que comprende medios para determinar las instrucciones de conducción a partir de una […]
Dispositivo para generar recomendaciones de actuación para el conductor de un vehículo ferroviario, del 6 de Noviembre de 2019, de Siemens Mobility GmbH: Dispositivo para generar recomendaciones de actuación para el conductor de un vehículo ferroviario , comprendiendo un aparato transportable por el conductor, […]
Sistema, producto de programa informático y procedimiento para determinar la localización de un vehículo en relación con un punto de parada, del 9 de Octubre de 2019, de Siemens Mobility, Inc: Un sistema para determinar una localización de un vehículo en relación con un punto de parada designado, comprendiendo el sistema: un dispositivo de interfaz de usuario […]
Procedimiento para controlar un vehículo de transporte terrestre, vehículo de transporte terrestre, equipo terrestre y sistema de transporte, del 2 de Octubre de 2019, de ALSTOM Transport Technologies: Procedimiento para controlar un vehículo de transporte terrestre que viaja en una vía, comprendiendo la pista, en una dirección de desplazamiento del vehículo de transporte […]