PROCEDIMIENTO PARA LA CLASIFICACIÓN SELECTIVA SECUENCIAL DE FLUJOS DE DESPERDICIOS E INSTALACIÓN PARA SU REALIZACIÓN.
Procedimiento de clasificación selectiva, adaptado a la clasificación de flujos de desperdicios,
que están constituidos por objetos (2) de varios tipos mezclados, comprendiendo este procedimiento: - una operación de transporte, que consiste en desplazar estos objetos (2) en forma de una napa (21) entre una entrada y una salida, - una operación de reconocimiento de materias, que consiste en analizar y en identificar cada objeto (2) de la napa (21) en desplazamiento y en asimilarlo a un tipo de objeto identificado bien entre un conjunto de tipos predefinidos, o bien como intruso, y - una operación de separación por materias, que consiste en desviar a los objetos (2), que pertenecen a uno u otro de los tipos diferentes, a la salida de la napa, hacia receptáculos (63) diferentes, caracterizado porque la operación de separación se lleva a cabo eliminando de manera secuencial de la napa (21) los objetos (22) de los diferentes tipos, que son elegidos, por turno, entre el conjunto de los tipos predefinidos de objetos y entre los intrusos, y porque comprende, así mismo, una operación de reciclaje, que consiste en reenviar hacia la entrada una parte (23), al menos, de la napa (21) de objetos (2), que hayan alcanzado la salida
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/001295.
Solicitante: VEOLIA PROPRETE.
Nacionalidad solicitante: Francia.
Dirección: 163-169 AVENUE GEORGES CLEMENCEAU 92000 NANTERRE FRANCIA.
Inventor/es: CHAMPEL,Martin, DOYEN,Olivier, GAMBIER,Christophe, LABONNE,Ella.
Fecha de Publicación: .
Fecha Solicitud PCT: 26 de Julio de 2007.
Clasificación Internacional de Patentes:
- B07C5/34 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › B07C 5/00 Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D). › Clasificación en función de otras propiedades particulares.
Clasificación PCT:
- B03B9/06 B […] › B03 SEPARACION DE SOLIDOS POR UTILIZACION DE LIQUIDOS O POR UTILIZACION DE MESAS O CRIBAS DE PISTON NEUMATICO; SEPARACION MAGNETICA O ELECTROSTATICA DE MATERIALES SOLIDOS A PARTIR DE MATERIALES SOLIDOS O DE FLUIDOS; SEPARACION POR CAMPOS ELECTRICOS DE ALTA TENSION. › B03B SEPARACION DE MATERIALES SOLIDOS POR UTILIZACION DE LIQUIDOS O POR UTILIZACION DE MESAS O CRIBAS DE PISTON NEUMATICO (operaciones para separar los fluidos de los sólidos B01D; separación magnética o electrostática de materiales sólidos a partir de materiales sólidos o fluidos, separación por campos eléctricos a alta tensión B03C; flotación, sedimentación diferencial B03D; separación por vía seca B07; cribado o tamizado B07B; separación por selección individual B07C; separación especial de materiales definidos, prevista en una sola de las otras clases, ver las clases apropiadas). › B03B 9/00 Disposición general de un taller de separación, p. ej. esquema operatorio. › especialmente adaptado a las basuras.
- B07C5/34 B07C 5/00 […] › Clasificación en función de otras propiedades particulares.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359100_T3.pdf

Fragmento de la descripción:
La presente invención se refiere, de una manera general, a un procedimiento para llevar a cabo la clasificación selectiva de objetos diversos, que permite llevar a cabo la clasificación secuencial diferentes tipos de objetos, así como a una instalación de clasificación selectiva, que está adaptada a un procedimiento de este tipo.
En particular, la presente invención se refiere a un procedimiento y a una instalación de clasificación selectiva, que encuentra su aplicación, de una manera más particular, en el campo de la clasificación de desperdicios.
De manera general, el procedimiento general de clasificación de desperdicios se descompone en varias etapas sucesivas, que permiten afinar de manera progresiva la separación de los diferentes componentes de un flujo de desperdicios, que deben ser clasificados. El procedimiento comprende, de manera general, las etapas sucesivas siguientes:
- a) la extracción manual de los objetos grandes y/o la trituración grosera;
- b) la extracción de los elementos finos, por ejemplo por cribado;
- c) la separación morfológica, eventualmente seguida por una etapa de reorientación de los elementos extraviados; y
- d) la separación por materias.
La invención se refiere, de una manera más particular, a la etapa de clasificación d) para llevar a cabo la separación de materias.
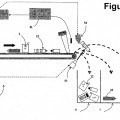
De una manera conocida, esta etapa del procedimiento general de clasificación de desperdicios está asegurada por máquinas automáticas de clasificación, que funcionan según el principio de la detección de la presencia de un objeto seguida por el reconocimiento de la materia, que está asociada con una eyección neumática, tales como las que han sido representadas en las figuras 1 y 2. Estas máquinas automáticas de clasificación 1 de desperdicios 2 son de un uso corriente en los centros de clasificación de desperdicios. De manera principal pueden ser citadas las máquinas de clasificación, que son comercializadas por las sociedades BINDER+CO, MSS (MAGNETIC SEPARATION SYSTEMS), NATIONAL RECOVERY TECHNOLOGIES, PELLENC SELECTIVE TECHNOLOGIES, RTT SYSTEMTECHNIK GmbH y TITECH VISIONSORT o que son conocidas por las publicaciones WO-A-02/04185, USA-3,747,755 o WO-A-96/36443. La máquina de clasificación, que está representada en la figura 1, comprende:
- una cinta transportadora rápida 3, para llevar a cabo el desplazamiento de los desperdicios 2 en forma de napa 21, hacia un puesto de clasificación 5, que comprende:
* un dispositivo de reconocimiento de materia 51, para llevar a cabo la detección y la localización de cada desperdicio 2 de la napa 21, para llevar a cabo el análisis y la identificación de la materia de la que está constituido y, a continuación, para atribuir a dicho material un tipo de desperdicios identificado entre un conjunto de tipos predefinidos, o para considerar a dicho material como intruso,
* una calculadora 52 (no representada en la figura 1), que define una orden de eyección o de no eyección, en función de los resultados del análisis llevado a cabo por parte del dispositivo de reconocimiento de materias 51, y de una consigan de clasificación introducida manualmente, y
* una rampa 53 de boquillas de eyección, que está situada por debajo del plano de la cinta transportadora 3 y cuyas boquillas, que son alimentadas con aire comprimido por medio de electroválvulas accionadas por la calculadora 52, son aptas para dar a los desperdicios 2, que deben ser eyectados, una cantidad de movimiento que permita alargar su trayectoria en la descarga de la cinta, de tal manera que los desperdicios eyectados 22 puedan alcanzar
- el dispositivo de recepción 6, que está constituido, de manera general, por una cinta transportadora (como
ocurre en el caso de la máquina de clasificación de la figura 1), o está constituido por diferentes
receptáculos (como ocurre en el caso para la máquina de clasificación de la figura 2).
Esta máquina de clasificación comprende, de la misma manera, un dispositivo de evacuación 7, que recibe los objetos no eyectados, que son encaminados, a continuación, hacia otra máquina de clasificación 1.
Es preciso tener en consideración que esta máquina de clasificación puede eyectar tanto los objetos que pertenecen a una de las clases buscadas, hablándose entonces de clasificación positiva, cuanto el conjunto de los intrusos, hablándose entonces de clasificación negativa.
De conformidad con un modo de realización más complejo de la máquina de clasificación 1 tal como, por ejemplo, el que ha sido representado en la figura 2, esta máquina puede estar dotada con una segunda rampa 54 de eyección, que está colocada por encima del plano de la cinta transportadora 3, y cuyos chorros son dirigidos hacia abajo. Las boquillas, con las que está dotada la máquina, permiten dar impulsos dirigidos desde arriba hacia abajo así como acortar la trayectoria de los objetos en la descarga de la cinta. Estas boquillas permitan, por lo tanto, llevar a cabo la clasificación, en un solo paso, de dos tipos de productos diferentes.
Sin embargo, no es posible con las máquinas clasificadoras de este tipo, llevar a cabo la clasificación de un mayor número de tipos de objetos, puesto que estas máquinas están limitadas, por construcción, a la clasificación simultanea de dos tipos de objetos o de grupos de tipos de objetos como máximo. Con objeto de llevar a cabo la clasificación de un mayor número de productos, por ejemplo seis o más, sería necesario asociar varias máquinas para llegar a ese resultado.
Otro inconveniente de este tipo de máquinas está relacionado con la heterogeneidad y con la variabilidad de la composición del flujo entrante de desperdicios que deben ser clasificados.
Esto se traduce en fluctuaciones muy importantes del caudal instantáneo en las diferentes máquinas, fluctuaciones que son tanto más importantes cuanto las máquinas intervengan en una posición situada más aguas abajo del proceso de clasificación, lo que ocurre, de una manera muy particular, en el caso de las máquinas dedicadas a la separación por materias. Estas fluctuaciones de caudal son susceptibles de provocar tanto una alimentación por defecto de la máquina de clasificación como, también, una saturación por superación de sus capacidades. Con objeto de evitar esta última situación, que se traduce en una degradación de la calidad de la clasificación, la solución, que es aplicada de una manera general, consiste en sobredimensionar estas máquinas, lo que aumenta el riesgo de alimentación por defecto y es muy perjudicial para la economía de su explotación.
El objeto de la presente invención consiste, por lo tanto, en proponer un procedimiento de clasificación selectiva así como una instalación de clasificación, que está adaptada para llevar a cabo la realización de este procedimiento, que permita mejorar las prestaciones técnicas, principalmente en términos de caudal y de números de objetos de tipos diferentes, que pueden ser clasificados de una manera simultánea, y que remedien los inconvenientes del arte anterior.
Con esta finalidad, la presenta invención propone un procedimiento de clasificación selectiva, que está adaptado parta llevar a cabo la clasificación de desperdicios, constituidos por objetos de varios tipos mezclados y que pertenecen a las diferentes clases de objetos predefinidos, que se desea separar entre sí o a la clase particular de intrusos, comprendiendo este procedimiento:
- una operación de transporte, que consiste en desplazar estos objetos en forma de una napa entre una entrada y una salida, - una operación de reconocimiento de materias, que consiste en analizar y en identificar cada objeto de la napa en desplazamiento y en asimilarlo bien a un tipo de objeto identificado entre un conjunto de tipos predefinidos o bien a un intruso, y - una operación de separación por materias, que consiste en desviar los objetos de tipos diferentes, a la salida de la napa, hacia receptáculos diferentes.En el transcurso de la etapa de separación por materias d) no solamente son separadas las diferentes clases o tipos de objetos buscados entre sí, sino que también son extraídos los diferentes intrusos.
Se entiende por intruso, en el sentido de la presente invención, cualquier objeto que esté presente en el flujo pero que no pertenezca a ninguno de los tipos de objetos predefinidos, buscados.
En el caso de n clases de objetos buscados,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de clasificación selectiva, adaptado a la clasificación de flujos de desperdicios, que están constituidos por objetos (2) de varios tipos mezclados, comprendiendo este procedimiento:
- una operación de transporte, que consiste en desplazar estos objetos (2) en forma de una napa (21) entre una entrada y una salida,
- una operación de reconocimiento de materias, que consiste en analizar y en identificar cada objeto (2) de la napa (21) en desplazamiento y en asimilarlo a un tipo de objeto identificado bien entre un conjunto de tipos predefinidos, o bien como intruso, y
- una operación de separación por materias, que consiste en desviar a los objetos (2), que pertenecen a uno u otro de los tipos diferentes, a la salida de la napa, hacia receptáculos (63) diferentes,
caracterizado porque la operación de separación se lleva a cabo eliminando de manera secuencial de la napa (21) los objetos (22) de los diferentes tipos, que son elegidos, por turno, entre el conjunto de los tipos predefinidos de objetos y entre los intrusos, y
porque comprende, así mismo, una operación de reciclaje, que consiste en reenviar hacia la entrada una parte (23), al menos, de la napa (21) de objetos (2), que hayan alcanzado la salida.
2. Procedimiento según la reivindicación 1, caracterizado porque los objetos (2), que son identificados como intrusos, son desviados, a la salida de la napa hacia un receptáculo suplementario (64), que es diferente de los receptáculos (63), que están destinados a recibir los objetos que pertenecen a uno u otro de los tipos predefinidos.
3. Instalación (1) de clasificación selectiva, adaptada a la clasificación de desperdicios, que están constituidos por objetos (2) de varios tipos mezclados, comprendiendo esa instalación (1):
a) medios de acondicionamiento y de transporte (3), (4), que son adecuados para desplazar a estos objetos
(2) en forma de una napa (21) entre una entrada y una salida,
b) medios de análisis (51), que están instalados sobre el trayecto de la napa (21) de los objetos (2) y que son adecuados para analizar y para identificar cada objeto (2) de la napa (21) en desplazamiento y para atribuirle un tipo de objeto identificado entre un conjunto de tipos predefinidos, y
c) medios de separación (53, 62), que están instalados a la salida, accionados por, al menos, los medios de análisis (51), y que son adecuados para evacuar los objetos identificados (22) enviándolos hacia receptáculos (63) respectivos diferentes,
caracterizada porque comprende, además:
d) medios de reciclaje (7), que son adecuados para reenviar hacia la entrada a los objetos (23) de la napa de objetos (21), que hayan alcanzado la salida sin haber sido evacuados, y
e) al menos un medio de pilotaje (52, 8) que es adecuado para el accionamiento de los medios de separación (53, 62) para evacuar de la napa (21) los objetos (22) de diferentes tipos, elegidos de manera secuencial en función de los tipos de objetos identificados por los medios de análisis (51).
4. Instalación de clasificación (1) según la reivindicación 3, caracterizada porque:
- los medios de separación (53, 62) comprenden:
* al menos un dispositivo de eyección (53) para eyectar los objetos (2) de la napa (21) hacia, al menos, un dispositivo (6)para llevar a cabo la recepción de los objetos eyectados (22); y
* un dispositivo de orientación (62), que comprende una pluralidad de desviadores (621) para repartir, en función de la consigna de clasificación, a los objetos eyectados (21) hacia sus receptáculos (63) respectivos,
- comprendiendo los medios de pilotaje (8), en uno o varios elementos:
* una calculadora (52), que es adecuada para definir una orden de eyección o de no eyección, en función de los resultados de análisis realizado por los medios de análisis (51) y de una consigna de clasificación, y
* un módulo de accionamiento central (8), apto para definir y/o para modificar la consigna de clasificación para la calculadora (52), y para configurar el dispositivo de orientación (62) en función de esta misma consigna de clasificación.
5. Instalación de clasificación (1) según la reivindicación 3 o 4, caracterizada porque:
- los medios de acondicionamiento y de transporte (3, 4) comprenden un dispositivo de diseminación (3), que es adecuado para disponer en forma de napa sensiblemente monocapa (21) a los objetos (2) que entra en el dispositivo de clasificación (1), y un transportador de alimentación (4) para transportar dichos objetos (2) hacia los medios de análisis (51), y
- los medios de reciclaje (7) están constituidos por un bucle de recirculación (7) que reenvía a los objetos no eyectados (23) hasta el dispositivo de clasificación (1) situado aguas arriba del dispositivo de diseminación (3).
6 Instalación de clasificación (1) según la reivindicación 5, caracterizada porque comprende, además, un dispositivo de almacenamiento tampón (9), que está dispuesto aguas arriba del dispositivo de diseminación (3), con objeto de desacoplar a los medios de análisis (51) y al dispositivo de eyección (62) del resto de la instalación de clasificación (1).
7. Instalación de clasificación (1) según la reivindicación 6, caracterizada porque comprende un dispositivo de reglaje del caudal (91) para regular el caudal de objetos (2) a la salida del dispositivo de almacenamiento (9), con el fin de mantener constante el caudal de alimentación con objetos (2) de los medios de análisis (5) y de los medios de eyección (62).
8. Instalación de clasificación (1) según una cualquiera de las reivindicaciones 3 a 7, caracterizada porque comprende, además, una sonda para llevar a cabo la medición del caudal (10), que está situada aguas arriba de los medios de análisis (51), al nivel de los medios de acondicionamiento y de transporte (3, 4), para determinar el caudal de alimentación con objetos (2).
9. Instalación de clasificación (1) según la reivindicación 8, caracterizada porque la sonda para llevar a cabo la medición de caudal (10), es una sonda de ultrasonidos, que mide la altura de la napa (21) de objetos (2) al nivel de los medios de acondicionamiento y de transporte (3, 4).
10. Instalación de clasificación (1) según la reivindicación 9, caracterizada porque la sonda para llevar a cabo la medición de caudal (10), es un captador óptico, que mide el grado de ocupación con objetos (2) de los medios de acondicionamiento y de transporte (3, 4).
11. Instalación de clasificación según una cualquiera de las reivindicaciones 3 a 10, caracterizada porque el dispositivo (6)para llevar a cabo la recepción de los objetos eyectados (22) comprende un dispositivo de encaminamiento (61), para transportar los objetos eyectados (22), que preceden del dispositivo de eyección (53), hacia el dispositivo de orientación (62) de los objetos eyectados (22).
12. Instalación de clasificación (1) según la reivindicación 11, caracterizada porque el dispositivo de encaminamiento
(61) de los objetos eyectados (22) está configurado con el fin de asegurar un transporte sensiblemente horizontal de los objetos eyectados (22) hacia el dispositivo de orientación (62), y los desviadores (621) del dispositivo de orientación (62) están configurados con el fin de repeler a los objetos eyectados (22) para hacer que abandonen el dispositivo de encaminamiento (61) a la altura del receptáculo (63), que está destinado a los mismos.
13. Instalación de clasificación según la reivindicación 12, caracterizada porque el dispositivo de encaminamiento
(61) es una cinta transportadora y los desviadores (621) son desviadores con chorros de aire.
14. Instalación de clasificación según la reivindicación 12, caracterizada porque el dispositivo de encaminamiento
(61) es una cinta transportadora y los desviadores (621) son desviadores de correa.
15. Instalación de clasificación según la reivindicación 12, caracterizada porque el dispositivo de encaminamiento
(61) es una cinta transportadora y los desviadores (621) son desviadores de tambor.
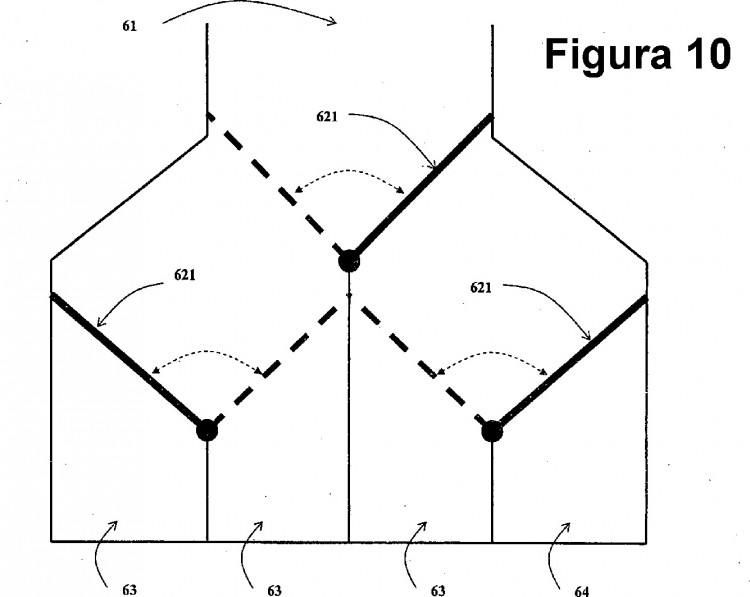
16. Instalación de clasificación según una cualquiera de las reivindicaciones 3 a 12, caracterizada porque el dispositivo de encaminamiento (61) está configurado con el fin de asegurar un transporte sensiblemente vertical de los objetos eyectados (22) hacia el dispositivo de orientación (62), y los desviadores (621) del dispositivo de orientación (62) están configurados con el fin de orientar a los objetos eyectados (22) hacia abaja, por encima del receptáculo (63), que está asociado con los mismos.
17. Instalación de clasificación según la reivindicación 16, caracterizada porque el dispositivo de encaminamiento
(61) es una tolva, y los desviadores (621) están constituidos por un conjunto de aletas, que están dispuestas en la tolva, que pueden pivotar alrededor de un eje horizontal con el fin de delimitar un conducto de encaminamiento de os objetos (22) hacia el receptáculo (63), que está asociado con los mismos.
18. Instalación de clasificación según una cualquiera de las reivindicaciones 3 a 17, caracterizada porque los medios de separación (53, 62) comprenden dos dispositivos de eyección (53) y dos dispositivos de orientación (62), cada uno de los cuales coopera con uno de los dispositivos de eyección (53).
19. Instalación de clasificación según una cualquiera de las reivindicaciones 3 a 18, caracterizada porque los medios de análisis (51), la calculadora (52) y el dispositivo de eyección (53) constituyen un dispositivo de clasificación automática (5).
20. Instalación de clasificación 1 de objetos (2) según la reivindicación 19, caracterizada porque comprende dos puestos de clasificación (5, 500) idénticos, que están dispuestos en serie, aguas arriba del dispositivo (6)para llevar a cabo la recepción de los objetos eyectados (22) y que son pilotados por los medios de pilotajes (52, 8), estando destinado el primer puesto de clasificación (5) a la clasificación (5) de los objetos (2), y estando destinado el segundo puesto de clasificación (500) a llevar a cabo el control de la calidad de la clasificación realizada por el primer puesto de clasificación (5).
21. Instalación de clasificación según una cualquiera de las reivindicaciones 3 a 20, caracterizada porque los medios de análisis (51) están constituidos por un dispositivo para llevar a cabo la determinación de los constituyentes de los objetos (2) por análisis del espectro de emisión de los objetos (2) en el campo del infrarrojo próximo.
22. Instalación de clasificación según la reivindicación 21, caracterizada porque el puesto de clasificación (5) comprende medios de análisis suplementarios (510), que están acoplados con los primeros medios de análisis (51).
Patentes similares o relacionadas:
Procedimiento y aparato para la inspección no destructiva de frutas que tienen un eje de simetría rotacional, del 15 de Julio de 2020, de MICROTEC, S.R.L: Un procedimiento para la inspección no destructiva de una fruta que tiene un eje de simetría rotacional, que comprende los pasos de: […]
Inspección óptica de recipientes, del 6 de Mayo de 2020, de OWENS-BROCKWAY GLASS CONTAINER INC.: Un aparato para inspeccionar una boca (M) de un recipiente (C) que tiene una base (B) con una picada (P) opuesta a la boca del recipiente, incluyendo dicho aparato: […]
Dispositivo y procedimiento para inspeccionar recipientes, del 8 de Abril de 2020, de Syntegon Technology GmbH: Dispositivo para inspeccionar recipientes , que comprende al menos un módulo de inspección para inspeccionar recipientes , al […]
MÉTODO Y SISTEMA PARA DETERMINAR LA FABRICACIÓN DE UN ENVASE DE VIDRIO CON SU NÚMERO DE MOLDE, del 26 de Marzo de 2020, de Vitro, S.A.B. de C.V: La presente invención se relaciona con método y sistema para determinar la fabricación de un envase de vidrio con su número de molde. El método consiste en establecer […]
SISTEMA Y MÉTODO DE SEPARACIÓN DE ACERO/MAGNETITA, PARA SOLUCIONAR DE MANERA INTEGRAL LA PROBLEMÁTICA ASOCIADA A LOS GRANDES ACOPIOS DE MINERAL DE MAGNETITA MEZCLADAS CON SCRAP DE BOLAS DE ACERO, PROVENIENTES DE PROCESOS DE BENEFICIO DE LA GRAN MINERÍA, del 19 de Marzo de 2020, de JOHN SUN: La presente invención se relaciona con un sistema y método de separación de acero/magnetita. El sistema comprende al menos buzón de alimentación , […]
Un procedimiento y aparato de clasificación de neumáticos, del 4 de Marzo de 2020, de Black Bear Carbon B.V: Un procedimiento de clasificación de neumáticos basado en sus componentes, caracterizado porque dichos neumáticos se clasifican en base a su […]
Dispositivo de selección de rechazos, del 23 de Enero de 2020, de JOSE BORRELL, S.A.: Dispositivo de selección de rechazos, en un conjunto de frutos secos desplazados sobre una cinta que comprende un elemento de soporte con una zona central […]
Sistema para distribución, empaquetado automático y devolución de productos editoriales, del 20 de Noviembre de 2019, de Klotzner, Stefan: Sistema para la distribución, empaquetado automático y devolución de productos editoriales que comprende: - un módulo de entrada ; - una báscula; […]