Procedimiento para el cálculo y corrección del ángulo de ataque en un parque de aerogeneradores.
Procedimiento para la medición y corrección del ángulo de ataque en un parque de aerogeneradores (11) mediante el que inicialmente se procede a medir el rendimiento de cada aerogenerador (11) del parque eólico para así poder tomar un aerogenerador modelo (10),
que será aquel que genere la máxima potencia. Mediante la creación de unos ejes de coordenadas solidarios a cada una de las palas (15) del aerogenerador (10), se calcula el ángulo de ataque en las palas (15) de este aerogenerador (10) modelo y se toma un valor de referencia para copiar en cada una de las palas (15) del resto de los aerogeneradores (11), de forma que se obtiene la mejor relación de potencia en cada aerogenerador (11) del parque eólico.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231674.
Solicitante: HISPAVISTA LABS AIE.
Nacionalidad solicitante: España.
Inventor/es: ELOSEGUI INSAUSTI,Unai, ELOSEGUI INSAUSTI,Jon.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F03D7/02 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F03 MAQUINAS O MOTORES DE LIQUIDOS; MOTORES DE VIENTO, DE RESORTES, O DE PESOS; PRODUCCION DE ENERGIA MECANICA O DE EMPUJE PROPULSIVO O POR REACCION, NO PREVISTA EN OTRO LUGAR. › F03D MOTORES DE VIENTO. › F03D 7/00 Control de los motores de viento (alimentación o distribución de energía eléctrica H02J, p. ej. disposiciones para ajustar, eliminar o compensar la potencia reactiva en las redes H02J 3/18; control de generadores eléctricos H02P, p. ej. disposiciones para el control de generadores eléctricos con el propósito de obtener las características deseadas en la salida H02P 9/00). › teniendo los motores de viento el eje de rotación dispuesto sustancialmente paralelo al flujo de aire que entra al rotor.
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un procedimiento para medir y ajustar el ángulo de incidencia del viento en las palas de los aerogeneradores de un parque, lo que se conoce como ángulo de ataque. El ángulo de ataque tiene especial importancia en el rendimiento de los aerogeneradores, por lo que es principal el tener un método de reglaje a la hora de instalar los aerogeneradores de un parque eólico.
Encuentra especial aplicación en el ámbito de la industria de las energías renovables.
PROBLEMA TÉCNICO A RESOLVER Y ANTECEDENTES DE LA INVENCIÓN
En la instalación de parques de generación de energía eólica mediante aerogeneradores existe un problema inicial que es el de instalar las palas en el aerogenerador con la referencia adecuada del ángulo de ataque definida en los planos constructivos y en condiciones de operación Es decir, cuando el sistema de control del aerogenerador indica 0º, por ejemplo, garantizar que la sección de la pala en el que se ha definido los 0º, esté realmente con ese ángulo de ataque.
Este ángulo al que se referencian las palas, con frecuencia presenta diferencias al ángulo de diseño para el que el aerogenerador está diseñado y con el que se obtiene el rendimiento óptimo. Debido a la dificultad de maniobra de piezas de tan grandes dimensiones y tonelaje, su instalación requiere de una precisión que es difícil de lograr en la instalación de las palas en los aerogeneradores. Estos reglajes vienen prefijados de fábrica con sendas marcas tanto en las palas como en el buje.
Dentro del buje hay ciertos elementos mecánicos que permiten variar el ángulo de incidencia de las palas con el viento, ángulo al que también se le conoce como ángulo de ataque o también como pitch. Para ello, estos sistemas lo que hacen es girar la pala sobre su propio eje longitudinal.
En el actual estado de la técnica los sistemas de control del pitch emplean principalmente dos tecnologías: la hidráulica y la eléctrica. El pitch hidráulico es ampliamente utilizado en turbinas de viento. El pitch eléctrico se está empezando a utilizar cada vez más en instalaciones de aerogeneradores de alta potencia, ya que ofrecen mejores características que los sistemas hidráulicos en cuanto a regulación y control.
Los sistemas de control eléctricos permiten regular el ángulo de ataque de las palas de forma continua, aunque no indican cual es el valor al que deben posicionarse para tener optimizada su posición.
El sistema de control del pitch se emplea ampliamente para limitar la potencia de trabajo de los aerogeneradores cuando la fuerza del viento sobrepasa un nivel determinado de diseño. Para evitar la rotura de las palas o incluso del propio aerogenerador se limita esta potencia recibida mediantes dos sistemas principalmente. Uno de ellos es modificando el pitch, de forma que el ángulo de ataque de las palas frente a la dirección del viento sea reducido, llegando incluso a ser nulo para situaciones de velocidades extremas del viento, pasando en este caso las palas a posición de bandera. El otro sistema es utilizar un freno para el giro de las palas. Este método, a pesar de ser más costoso inicialmente, tiene la ventaja de que permite el funcionamiento del aerogenerador incluso en situaciones de viento extremo, puesto que las palas giran a la velocidad a la que se haya limitado a través del freno. Se emplea en instalaciones en las que las palas son fijas y no puede regularse el pitch.
Como estado de la técnica más cercano a la presente invención podemos citar los dos documentos que se muestran a continuación.
En el documento AU2011201621A1 se describe un aerogenerador en el que las palas pueden girar alrededor de sus ejes. De esta forma, variando el ángulo de las palas en relación con la dirección del viento, se puede obtener la posición más favorable para maximizar la potencia obtenida.
En el documento ES23811094A1 se describe un método de monitorización del rendimiento de un aerogenerador en el que igualmente las palas pueden girar alrededor de sus ejes, siguiendo una curva de potencia frente a velocidad del generador en función de la velocidad del viento.
En ambos documentos, haciendo pruebas para los diferentes ángulos de pitch, se llega a conocer cuál es el valor óptimo al que deben colocarse las palas.
Sin embargo, en estos casos la forma de ajustar las palas en el aerogenerador durante su instalación y la posición en la que quedan las palas una vez han sido instaladas está basada en marcas prefijadas, pero no se procede a hacer una medición final de calibración que asegure que las palas están en su posición correcta. De esta forma, si en la instalación inicial de un aerogenerador las palas se instalan con diferentes ángulos entre ellas o en un valor que no corresponda al de pitch óptimo, esta situación se mantendrá durante la vida del aerogenerador y la posterior monitorización o ajustes del pitch no estarán correctamente referenciados.
Un método que se sigue en la actualidad para intentar solucionar (siempre a posteriori) , el problema de tener todas las palas en la misma posición relativa y con ángulo absoluto igual al diseñado es utilizar un procedimiento basado en la medición mediante fotografías (que se emplea principalmente cuando el problema es evidente visualmente o existe un problema serio de rendimiento en el molino y siempre es a posteriori) . De forma que se determina cuál es la posición relativa de las diferentes palas de un aerogenerador mediante la posición en la que aparecen las diferentes palas en estas fotografías. Y con los planos de las palas y el pitch de máxima cuerda de la pala indicada en dicho planos, se comparan con la sacada en la fotografía y se determina la desviación absoluta de la pala. Este método es bastante rudimentario y aporta muy poca precisión a la medición, además de ser totalmente inservible para parques eólicos marítimos, en los que las fotografías deben tomarse en una plataforma flotante que además añade la imprecisión de su posición y movimiento.
La presente invención viene a solucionar estos problemas, donde se describe un proceso de medición y corrección del pitch óptimo para la orientación de las palas de los aerogeneradores en la instalación de un parque eólico nuevo o en la revisión a posteriori de las palas de un aerogenerador
DESCRIPCIÓN DE LA INVENCIÓN
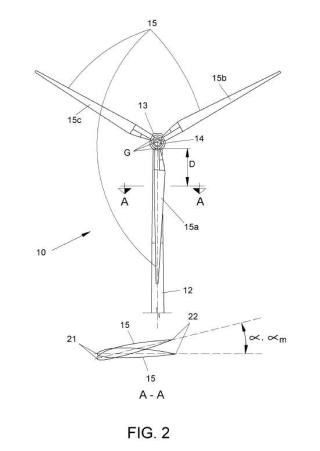
La presente invención describe un procedimiento para la medición y corrección del ángulo de ataque en un parque de aerogeneradores que comprenden una torre (12) , una góndola (13) , un buje (14) y unas palas (15) donde se mide la potencia generada por cada uno de los aerogeneradores del parque, de forma que queda definido un aerogenerador modelo como aquel que genera la mayor potencia, se crea un sistema de coordenadas GXYZ en una primera pala del aerogenerador modelo, definido por un eje X, un eje Y, un eje Z y un origen de coordenadas G, se calcula el ángulo formado entre una recta formada por dos puntos conocidos de la pala y el eje Y, obteniéndose un ángulo de referencia (α) . El ángulo de ataque se calcula como el complementario de este ángulo de referencia.
Para la generación del sistema de coordenadas de referencia GXYZ se siguen las siguientes fases: se miden al menos tres puntos de la cara frontal de la góndola por la que se une al buje, definiéndose un plano AB, se miden al menos tres puntos del contorno circunferencial de unión de la primera pala con el buje, definiéndose una sección circula cuyo centro G es el origen del sistema de coordenadas de esta primera pala, se define el eje X como un eje perpendicular a la sección circular y que pasa por el origen G, se define el eje Y como un eje perpendicular al eje X, que es paralelo al plano AB y que pasa por el origen G, se define un tercer eje Z como un eje perpendicular a los ejes X e Y anteriormente definidos, y que pasa por el origen G.
Posteriormente, se crea un sistema de coordenadas de referencia GXYZ en las restantes palas del aerogenerador modelo, de forma que se define un sistema de coordenadas en cada una de las palas del aerogenerador modelo.
En la primera pala del aerogenerador modelo, a una distancia del origen G en la dirección del eje X , se toman medidas de una serie de puntos que definen la sección transversal de la primera pala, para así obtener la posición de dos puntos de la primera pala, siendo la recta que une estos dos puntos una recta de referencia.
Hay casos en que la distancia desde el origen G sobre el eje X de la primera pala a la que se encuentra la sección transversal en la que un valor del ángulo de referencia es conocido, y viene dada por los planos de las palas del aerogenerador.
...
Reivindicaciones:
1. Procedimiento para el cálculo y corrección del ángulo de ataque en un parque de aerogeneradores (11)
que comprenden: -una torre (12) , -una góndola (13) , -un buje (14) , -unas palas (15) ,
caracterizado por que: -se define un aerogenerador modelo (10) como aquel que genera la máxima potencia de entre todos los aerogeneradores (11) del parque, -se crea un sistema de coordenadas GXYZ en una primera pala (15a) del aerogenerador modelo (10) , definido por un eje X (1) , un eje Y (2) , un eje Z (3) y un origen de coordenadas G, -se calcula el ángulo formado entre una recta formada por dos puntos (21, 22, 23, 24) conocidos de la primera pala (15a) y el eje Y (2) , obteniéndose un ángulo de referencia (α) , -se calcula el ángulo de ataque de la primera pala (15a) como el complementario del ángulo de referencia (α) .
2. Procedimiento según la reivindicación 1, caracterizado por que el sistema de coordenadas de referencia GXYZ comprende las siguientes fases para su generación: -se miden al menos tres puntos de la cara frontal de la góndola (13) por la que se une al buje (14) , definiéndose un plano AB (5) , -se miden al menos tres puntos del contorno circunferencial de unión de la primera pala (15a) con el buje (14) , definiéndose una sección circular (4) cuyo centro G es el origen del sistema de coordenadas de esta primera pala (15a) , -se define el eje X (1) como un eje perpendicular a la sección circular (4) y que pasa por el origen G, -se define el eje Y (2) como un eje perpendicular al eje X (1) , que es paralelo al plano AB (5) y que pasa por el origen G, -se define un tercer eje Z (3) como un eje perpendicular a los ejes X e Y (1, 2) anteriormente definidos, y que pasa por el origen G.
3. Procedimiento según la reivindicación 2, caracterizado por que se crea un sistema de coordenadas de referencia GXYZ en las restantes palas (15b, 15c) del aerogenerador modelo (10) , de forma que se define un sistema de coordenadas en cada una de las palas (15) del aerogenerador modelo (10) .
4. Procedimiento según la reivindicación 2, caracterizado por que en la primera pala (15a) del aerogenerador modelo (10) , a una distancia cualquiera (D) del origen G en la dirección del eje X (1) , se toman medidas de una serie de puntos que definen la sección transversal de la primera pala (15a) , para así obtener la posición de dos puntos (21, 22, 23, 24) de la primera pala (15a) , siendo la recta que une estos dos puntos (21, 22, 23, 24) una recta de referencia (25) .
5. Procedimiento según la reivindicación 4, caracterizado por que la distancia cualquiera (D) desde el origen G sobre el eje X (1) de la primera pala (15a) a la que se encuentra la sección transversal en la que un valor del ángulo de referencia (α) es conocido, viene dada en los planos del aerogenerador (11) .
6. Procedimiento según una cualquiera de las reivindicaciones 4 ó 5, caracterizado por que si la sección transversal de la primera pala (15a) es simétrica, los dos puntos (21, 22, 23, 24) son el borde de ataque (21) de la pala (15a) y el borde de salida (22) de la pala (15a) , siendo la recta que une estos dos puntos (21, 22) la cuerda (7) , que coincide con el eje de simetría de la pala (15a) .
7. Procedimiento según una cualquiera de las reivindicaciones 4 ó 5, caracterizado por que si la sección transversal de la primera pala (15a) no es simétrica, la cuerda (7) se obtiene trazando sobre la sección de la primera pala (15a) un arco de circunferencia con centro en el borde de salida (22) y con un radio conocido, siendo la cuerda (7) resultante la línea que va desde este centro (22) hasta el punto de corte del arco de circunferencia con la circunferencia del borde de ataque (6) .
8. Procedimiento según una cualquiera de las reivindicaciones 4 ó 5, caracterizado por que si la sección transversal de la primera pala (15a) no es simétrica, a la distancia cualquiera (D) del origen G sobre el eje X
(1) de la primera pala (15a) en una sección transversal, se miden dos puntos (23, 24) conocidos para calcular una recta de referencia (25) y que son: -el centro (23) de la circunferencia del borde de ataque (6) en la sección transversal de la primera pala (15a) , y -el punto (24) de esta sección perteneciente al eje X (1) , o proyección del origen de coordenadas G en esta sección.
9. Procedimiento según cualquiera de las reivindicaciones 1 a 8, caracterizado por que: -se mide el ángulo de referencia (α) en las restantes palas (15) del aerogenerador modelo (10) , -cuando todas las palas (15) del aerogenerador modelo (10) tienen valores diferentes del ángulo de referencia (α) , se considera un ángulo de referencia modelo (αm) dado por la media aritmética de los valores de los ángulos de referencia (α) calculados para todas las palas (15) del aerogenerador modelo (10) .
10. Procedimiento según cualquiera de las reivindicaciones 1 a 8, caracterizado por que: -se mide el ángulo de referencia (α) en las restantes palas (15) del aerogenerador modelo (10) , -cuando al menos dos de las palas (15) del aerogenerador modelo (10) tienen el mismo valor del ángulo de referencia (α) , se considera este valor como ángulo de referencia modelo (αm) .
11. Procedimiento según una cualquiera de las reivindicaciones 4 ó 5, caracterizado por que se mide en una primera pala (15a) de un nuevo aerogenerador (11) , el ángulo de referencia (α) a la misma distancia (D) del origen G en la dirección del eje X (1) de esta primera pala (15a) .
12. Procedimiento según la reivindicación 11 y cualquiera de las reivindicaciones 9 ó 10, caracterizado por que se ajusta el valor del ángulo de referencia (α) de la primera pala (15a) del nuevo aerogenerador (11) hasta que se posicione con el mismo valor del ángulo de referencia modelo (αm) obtenido para el aerogenerador modelo (10) .
13. Procedimiento según la reivindicación 12, caracterizado por que se mide en el resto de las palas (15b, 15c) del nuevo aerogenerador (11) , el ángulo de referencia (α) a la misma distancia (D) del origen G en la dirección del eje X (1) de cada una de las restantes palas (15b, 15c) .
14. Procedimiento según las reivindicaciones 13, caracterizado por que se ajusta el valor del ángulo de referencia (α) del resto de las palas (15b, 15c) del nuevo aerogenerador (11) hasta que se posicione con el mismo valor del ángulo de referencia modelo (αm) obtenido para el aerogenerador modelo (10) .
15. Procedimiento según la reivindicaciones 14, caracterizado por que se mide y se ajusta el valor del ángulo de referencia (α) de todas las palas (15) del resto de aerogeneradores (11) del parque eólico hasta que se posicione con el mismo valor del ángulo de referencia modelo (αm) obtenido para el aerogenerador modelo (10) .
Patentes similares o relacionadas:
Aparato y procedimiento para hacer funcionar una turbina eólica en condiciones de voltaje de red de suministro bajo, del 22 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Generador de turbina eólica que incluye un rotor que tiene palas de paso variable conectadas de forma funcional a él, un generador AC para suministrar electricidad […]
Método y sistema de control para turbina eólica que tiene múltiples rotores, del 15 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Sistema de turbina eólica que comprende: una pluralidad de módulos de turbina eólica montados en una estructura de soporte , en el que cada uno de los módulos […]
Sensor de error de guiñada, turbina eólica y ajuste de ángulo de guiñada, del 15 de Julio de 2020, de Siemens Gamesa Renewable Energy A/S: Un sensor de detección de error de guiñada que está adaptado para montarse en una turbina eólica de un tipo de eje horizontal, en el que el sensor de detección […]
Disposición de turbina, del 15 de Julio de 2020, de Zephir Limited: Una disposición de turbina que comprende una turbina que incluye una pluralidad de palas de turbina giratorias alrededor de un eje de turbina, […]
Sistema y procedimiento para detener el funcionamiento de una turbina eólica, del 1 de Julio de 2020, de GENERAL ELECTRIC COMPANY: Un procedimiento para detener el funcionamiento de una turbina eólica, comprendiendo el procedimiento: recibir las señales asociadas con al menos una […]
Sistema de control para amortiguar las vibraciones estructurales de un sistema de aerogenerador que tiene múltiples rotores, del 1 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Un sistema de aerogenerador que comprende: una pluralidad de aerogeneradores montados en una estructura de soporte que incluye una torre, en donde cada […]
Procedimiento para hacer funcionar una instalación de energía eólica, así como instalación de energía eólica, del 1 de Julio de 2020, de Wobben Properties GmbH: Procedimiento para hacer funcionar una instalación de energía eólica con un generador para suministrar potencia eléctrica a una red eléctrica, donde la instalación […]
Procedimiento de funcionamiento de un conjunto de guiñada de turbina eólica, del 1 de Julio de 2020, de Siemens Gamesa Renewable Energy A/S: Un procedimiento para hacer funcionar un conjunto de guiñada de turbina eólica que comprende un anillo de guiñada y una serie de unidades de accionamiento de […]