PROCEDIMIENTO DE AUTOCALIBRADO PARA GATOS ELÉCTRICOS DE GÓNDOLA DE TURBORREACTOR.
Procedimiento de autocalbrado de un capó móvil (2) de inversor de empuje de una góndola (1) de turborreactor que comprende por lo menos un gato eléctrico (6a,
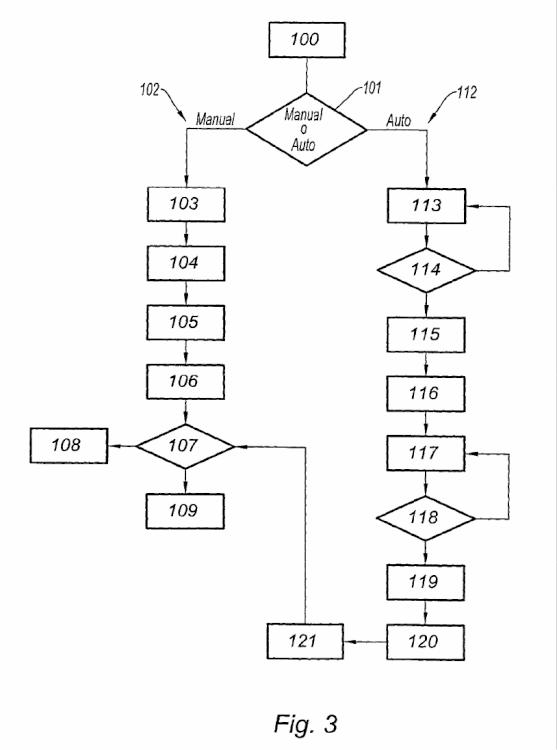
6b) asociado a por lo menos un órgano de medición de posición, caracterizado porque comprende las etapas que consisten en: - llevar (103, 113) el capó móvil y el o los gatos asociados en posición retraída que corresponde a una primera posición del capó móvil, - memorizar (104, 116) uno o varios valores de posición devueltos por el o los órganos de medición de posiciones en dicha posición retraída, - llevar (105, 117) el capó móvil y el o los gatos asociados en posición desplegada que corresponde a una segunda posición del capó móvil, - memorizar (106, 120) uno o varios valores de posición devueltos por el órgano de medición de posiciones en dicha posición desplegada
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2008/000125.
Solicitante: AIRCELLE.
Nacionalidad solicitante: Francia.
Dirección: ROUTE DU PONT 8 76700 GONFREVILLE L'ORCHER FRANCIA.
Inventor/es: MARIN-MARTINOD,Thierry, MAALIOUNE,Hakim.
Fecha de Publicación: .
Fecha Solicitud PCT: 1 de Febrero de 2008.
Clasificación Internacional de Patentes:
- F02K1/76A
Clasificación PCT:
- F02K1/76 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F02 MOTORES DE COMBUSTION; PLANTAS MOTRICES DE GASES CALIENTES O DE PRODUCTOS DE COMBUSTION. › F02K PLANTAS MOTRICES DE PROPULSION A REACCION (disposición o montaje de instalaciones de propulsión a reacción sobre vehículos de tierra o vehículos en general B60K; disposición o montaje de instalaciones de propulsión a reacción en buques B63H; control de la posición de aeronaves, dirección del vuelo o de la altitud, por propulsión a reacción B64C; disposición o montaje de instalaciones de propulsión a reacción en aeronaves B64D; instalaciones caracterizadas porque la potencia del fluido energético se divide entre propulsión a reacción y otra forma de propulsión, p. ej. a hélice, F02B, F02C; características de las instalaciones de propulsión a reacción comunes a las plantas de turbinas de gas o control de la alimentación de combustible en las instalaciones de propulsión a reacción que consumen aire F02C). › F02K 1/00 Plantas o instalaciones caracterizadas por la forma o disposición del conducto del chorro o tobera; Conductos de chorros o toberas particulares a este fin (toberas de cohetes F02K 9/97). › Control o regulación de los inversores de empuje.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2359188_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un procedimiento de autocalibrado de gatos eléctricos que equipan un inversor de empuje de turborreactor.
La función de un inversor de empuje cuando tiene lugar el aterrizaje de un avión es mejorar la capacidad de frenado de un avión redirigiendo hacia la parte delantera por lo menos una parte del empuje generado por el turborreactor. En esta fase, el inversor obstruye la tobera de expulsión de los gases y dirige el flujo de expulsión del motor hacia la parte delantera de la góndola, generando con ello un contraempuje que pasa a añadirse al frenado de las ruedas del avión.
Los medios utilizados para realizar esta reorientación del flujo varían según el tipo de inversor. Sin embargo, en todos los casos, la estructura de un inversor comprende unos capós móviles desplazables entre, por una parte, una posición desplegada en la que abren en la góndola un paso destinado al flujo desviado, y por otra parte, una posición de escamoteado en la cual cierran este paso. Estos capós móviles pueden realizar además una función de desviación o simplemente de activación de otros medios de desviación.
En los inversores de rejillas, por ejemplo, los capós móviles deslizan a lo largo de raíles de manera que, retrocediendo cuando tiene lugar la fase de apertura, descubren unas rejillas de álabes de desviación dispuestas en el espesor de la góndola. Un sistema de bielas une este capó móvil a unas puertas de bloqueo que se despliegan en el interior del canal de expulsión y bloquean la salida en flujo directo. En los inversores con puertas, en cambio, cada capó móvil pivota de manera que pase a bloquear el flujo y desviarlo y es por tanto activo en esta reorientación.
Recientemente, los gatos hidráulicos o neumáticos que accionan clásicamente estos capós móviles han empezado a ser reemplazados por unos gatos eléctricos de manera que se evite la colocación de un sistema de alimentación de fluido a presión que requería un mantenimiento importante y se permita un pilotaje mejorado de la apertura y del cierre de dichos capós móviles.
Las solicitudes de patente EP 0 843 089, FR 2 872 222 y FR 2 872 223, entre otras, tratan de estos sistemas de accionamiento eléctricos.
Existe un problema cuando tiene lugar la instalación de estos accionadores eléctricos. En efecto, cuando tiene lugar su instalación, los gatos eléctricos deben ser calados y su posición calibrada teniendo en cuenta dispersiones mecánicas de la góndola así como de los juegos y diferencias de ensamblaje. Este procedimiento es largo y fastidioso y debe ser reproducido después de cada colocación y reinstalación de los gatos a consecuencia, por ejemplo, de una operación de mantenimiento sobre el inversor. Los operarios de mantenimiento, diferentes de los operarios especializados del ensamblaje, deben por tanto controlar también este procedimiento de calibrado de los gatos eléctricos.
Actualmente, cuando tiene lugar la instalación de los gatos, el operario se contenta con montar físicamente estos gatos sin preocuparse de las tolerancias mecánicas de la góndola. Evidentemente, la carrera de los gatos está definida previamente de manera que cubra el peor caso. Una instalación de este tipo no es por tanto precisa y puede ser ampliamente mejorada para adaptar de manera muy precisa la carrera de los gatos de cada góndola.
La presente invención tiene por objetivo evitar los inconvenientes mencionados anteriormente, y consiste para ello en un procedimiento de autocalibrado de un capó móvil de inversor de empuje de una góndola de turborreactor que comprende por lo menos un gato eléctrico asociado a por lo menos un órgano de medición de posición, caracterizado porque comprende las etapas que prevén:
- llevar el elemento móvil y el o los gatos asociados en posición retraída que corresponde a una primera posición del capó móvil,
- memorizar uno o varios valores de posición devueltos por el órgano de medición de posiciones para el o los gatos en dicha posición retraída,
- llevar el elemento móvil y el o los gatos asociados en posición desplegada que corresponde a una segunda posición del capó móvil,
- memorizar uno o varios valores de posición devueltos por el órgano de medición de posiciones para el o los gatos en dicha posición desplegada.
Así, memorizando electrónicamente las posiciones desplegada y retraída de los gatos eléctricos, se definen a partir de los topes mecánicos reales unos topes eléctricos correspondientes. De esta manera, contrariamente a la práctica habitual que consiste en adaptar los topes mecánicos de los gatos en función de las dispersiones mecánicas de la góndola, los movimientos de desplegado y de retracción de los gatos se podrán efectuar en función de topes electrónicos definidos de manera sencilla y precisa en función de las dispersiones mecánicas reales para cada góndola y capó móvil en cuestión.
**(Ver fórmula)**
Por otra parte, definiendo electrónicamente estas posiciones, sus valores pueden ser utilizados por un controlador en la aplicación de una estrategia de despliegue o de retracción para, por ejemplo, reducir automáticamente la velocidad de los gatos antes del acercamiento a tope.
Según un primer modo de realización, el o los gatos son accionados manualmente.
Según un segundo modo de realización, el o los gatos son accionados eléctricamente.
Ventajosamente, las posiciones retraída y desplegada de los gatos son detectadas automáticamente mediante la detección de topes mecánicos.
Según una primera variante de realización, la detección de los topes mecánicos se efectúa mediante la medición de la variación de corriente de alimentación de un motor eléctrico que acciona el o los gatos.
Según una segunda variante de realización, la detección de los topes se efectúa mediante la medición de la velocidad de despliegue y de retracción de los gatos.
De manera preferida, la velocidad de despliegue o de retracción se obtiene mediante la derivación del valor de posición devuelto por el órgano de medición de posición.
Evidentemente, se puede utilizar cualquier otro procedimiento de detección automática de los topes por explotación de un parámetro medible.
De manera preferida, el órgano de medición de posición es un resólver. Evidentemente es posible utilizar cualquier otro dispositivo de medición de posición conocido por el experto en la materia, tales como unos codificadores ópticos, unos potenciómetros, etc.
Ventajosamente, los valores de las posiciones retraída y desplegada memorizadas son corregidos por la aplicación de un margen de error. En efecto, efectuándose la medición de posición cuando el gato llega a tope desplegado o a tope retraído, será ventajoso definir un tope electrónico muy ligeramente antes del tope mecánico de manera que se reduzca, incluso se evite, el choque de tope que corre el riesgo, al final, de fragilizar las piezas mecánicas, asegurando al mismo tiempo un cierre o un despliegue óptimo. El margen de error a aplicar será fácilmente determinado por el experto en la materia.
La presente invención se refiere asimismo a un inversor de empuje que comprende por lo menos un capó móvil que puede ser desplazado bajo la acción de por lo menos un órgano electromecánico de tipo gato eléctrico, caracterizado porque comprende una interfaz de mando y de regulación apta para realizar un procedimiento según la invención. Ventajosamente, la interfaz de mando está conectada a una caja de mando del turborreactor y el procedimiento de autocalibrado puede ser activado desde la cabina de pilotaje.
La puesta en práctica de la invención se pondrá más claramente de manifiesto a partir de la descripción detallada que se expone a continuación haciendo referencia al plano adjunto, en el que:
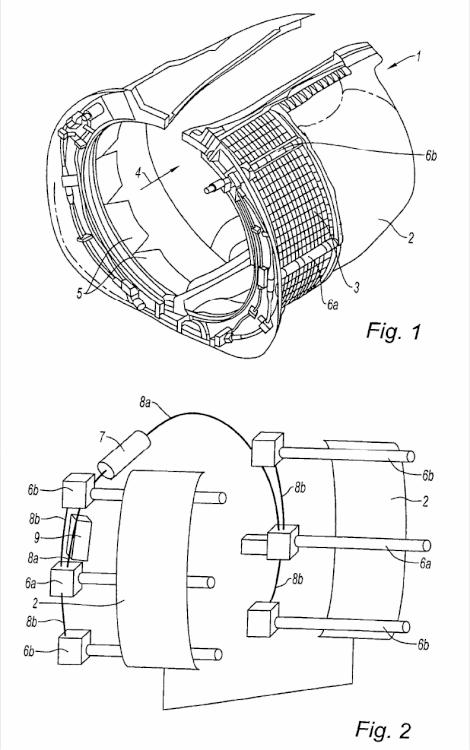
La figura 1 es una vista esquemática parcial en perspectiva de una góndola que integra un inversor de empuje de rejilla.
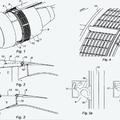
La figura 2 es una representación esquemática de los capós móviles y de su sistema de accionamiento.
La figura 3 es un diagrama que representa las etapas de funcionamiento de un procedimiento de mando según la invención para el calibrado de un sistema de accionamiento de un inversor de empuje.
Antes de describir en detalle un modo de realización de la invención,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de autocalbrado de un capó móvil (2) de inversor de empuje de una góndola (1) de turborreactor que comprende por lo menos un gato eléctrico (6a, 6b) asociado a por lo menos un órgano de medición de posición, caracterizado porque comprende las etapas que consisten en:
- llevar (103, 113) el capó móvil y el o los gatos asociados en posición retraída que corresponde a una primera posición del capó móvil,
- memorizar (104, 116) uno o varios valores de posición devueltos por el o los órganos de medición de posiciones en dicha posición retraída,
- llevar (105, 117) el capó móvil y el o los gatos asociados en posición desplegada que corresponde a una segunda posición del capó móvil,
- memorizar (106, 120) uno o varios valores de posición devueltos por el órgano de medición de posiciones en dicha posición desplegada.
2. Procedimiento según la reivindicación 1, caracterizado porque el o los gatos (6a, 6b) son accionados (103, 105) manualmente.
3. Procedimiento según la reivindicación 1, caracterizado porque el o los gatos (6a, 6b) son accionados (113, 117) eléctricamente.
4. Procedimiento según la reivindicación 3, caracterizado porque las posiciones retraída y desplegada de los gatos (6a, 6b) son detectadas automáticamente (114, 118) mediante la detección de topes mecánicos.
5. Procedimiento según la reivindicación 4, caracterizado porque la detección (114, 118) de los topes mecánicos se efectúa mediante la medición de la variación de corriente de alimentación de un motor (7) eléctrico que acciona el o los gatos (6a, 6b).
6. Procedimiento según la reivindicación 4, caracterizado porque la detección (114, 118) de los topes se efectúa mediante la medición de la velocidad de despliegue o de retracción de los gatos (6a, 6b).
7. Procedimiento según la reivindicación 6, caracterizado porque la velocidad de despliegue o de retracción se obtiene mediante la derivación del valor de posición devuelto por el órgano de medición de posición.
8. Procedimiento según cualquiera de las reivindicaciones 1 a 7, caracterizado porque el órgano de medición de posición es un resólver.
9. Procedimiento según cualquiera de las reivindicaciones 1 a 8, caracterizado porque los valores de las posiciones retraída y desplegada memorizados son corregidos por la aplicación (108) de un margen de error.
10. Inversor de empuje que comprende por lo menos un capó móvil (2) que puede ser desplazado bajo la acción de por lo menos un órgano electromecánico de tipo gato eléctrico (6a, 6b), caracterizado porque comprende una interfaz de mando (9) y de regulación apta para poner en práctica un procedimiento según cualquiera de las reivindicaciones 1 a 9.
11. Inversor según la reivindicación 10, caracterizado porque la interfaz de mando (9) está conectada a una caja de mando del turborreactor, y porque el procedimiento de autocalibrado puede ser activado desde la cabina de pilotaje.
Patentes similares o relacionadas:
DISPOSITIVO Y PROCEDIMIENTO DE MANDO DE LA ALIMENTACIÓN DE POR LO MENOS UN ACCIONADOR DE MANTENIMIENTO DE UNA AERONAVE, del 16 de Junio de 2011, de AIRCELLE: Dispositivo de mando de la alimentación de por lo menos un accionador de mantenimiento de una aeronave a partir de una red de alimentación eléctrica […]
SISTEMA DE CONTROL DE POR LO MENOS UN ACCIONADOR DE CUBIERTAS DE UN INVERSOR DE EMPUJE PARA TURBORREACTOR, del 10 de Junio de 2011, de AIRCELLE: Sistema de control de por lo menos un accionador de cubiertas de un inversor de empuje para turborreactor, que comprende: - por lo […]
Tobera para motor de aeronave, del 10 de Octubre de 2018, de THE BOEING COMPANY: Un aparato que comprende: un manguito de tobera de ventilador, en donde un flujo de gases generado por un motor se desplaza a través del […]
 Inversor de empuje con rejillas móviles y capó móvil monobloque, del 23 de Febrero de 2016, de AIRCELLE: Inversor de empuje para góndola de turborreactor que comprende:
- por lo menos un capó externo móvil en traslación desde una posición denominada de cierre […]
Inversor de empuje con rejillas móviles y capó móvil monobloque, del 23 de Febrero de 2016, de AIRCELLE: Inversor de empuje para góndola de turborreactor que comprende:
- por lo menos un capó externo móvil en traslación desde una posición denominada de cierre […]
 Accionador lineal de doble acción, del 23 de Febrero de 2016, de AIRCELLE: Accionador lineal de doble acción para desplazar un primer elemento (10b) y un segundo elemento (10a) con relación a un elemento fijo […]
Accionador lineal de doble acción, del 23 de Febrero de 2016, de AIRCELLE: Accionador lineal de doble acción para desplazar un primer elemento (10b) y un segundo elemento (10a) con relación a un elemento fijo […]
 Conjunto para turborreactor de aeronave que comprende un capó de inversión de empuje, del 30 de Diciembre de 2015, de AIRCELLE: Conjunto para turborreactor, que comprende un mástil y una góndola soportada por este mástil , siendo esta góndola del tipo que comprende […]
Conjunto para turborreactor de aeronave que comprende un capó de inversión de empuje, del 30 de Diciembre de 2015, de AIRCELLE: Conjunto para turborreactor, que comprende un mástil y una góndola soportada por este mástil , siendo esta góndola del tipo que comprende […]
Procedimiento y sistema de mando de por lo menos un accionador de capós de un inversor de empuje para turborreactor, del 20 de Mayo de 2015, de AIRCELLE: Sistema de mando de por lo menos un accionador de capós de un inversor de empuje para turborreactor de una aeronave que comprende un conjunto de componentes […]
Sistema de mando de por lo menos un accionador de capós de un inversor de empuje para turborreactor, del 20 de Mayo de 2015, de AIRCELLE: Sistema de mando de por lo menos un accionador de capós de un inversor de empuje para turborreactor de una aeronave que comprende: a) por lo menos […]