PROCEDIMIENTO Y APARATO PARA LA UTILIZACIÓN DE UN SISTEMA AUTOMÁTICO DE SEGUIMIENTO DEL CARRIL PARA MANTENER LA SEPARACIÓN LATERAL DEL VEHÍCULO.
Un procedimiento para pilotar un vehículo que comprende: - la detección de objetos en carriles adyacentes a un carril ocupado por el vehículo que utiliza un sistema de seguimiento del carril;
- el ajuste, con relación a por lo menos un objeto detectado, de la posición lateral del vehículo dentro del carril ocupado, en donde se aplica una posición diferente en el carril deseado mediante el sistema de seguimiento del carril sobre la base de la consideración de la distancia lateral a otro objeto en un carril adyacente mediante la modificación los parámetros en el algoritmo de apoyo al seguimiento del carril, caracterizado porque - en un primer nivel de interacción con el conductor con relación a la información, el sistema de seguimiento del carril informa al conductor de la presencia de un vehículo en el área lateral de ambos lados del propio vehículo; - en un segundo nivel de interacción con el conductor con relación a la precaución, cuando se detecta un vehículo en el área lateral y el conductor está utilizando el indicador de la señal de cambio de dirección, el sistema de seguimiento del carril avisa al conductor a través de un canal de aviso seleccionado; y - en un tercer nivel de interacción con el conductor con relación a la intervención de aviso/activa, cuando existe un riesgo de colisión lateral debido al cambio de carril, se proporciona una acción de dirección correctiva o en caso de modo de aviso únicamente el sistema de seguimiento del carril avisa al conductor hápticamente a través del volante
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2007/000565.
B62D1/28TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 1/00 Mando de la dirección, es decir, medios para producir un cambio en la dirección del vehículo. › no mecánicos.
B62D15/02F
B62D15/02F6
G05D1/02E10
G05D1/02E6V
G08G1/16FISICA. › G08SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas anticolisión.
Clasificación PCT:
B60W30/12B […] › B60VEHICULOS EN GENERAL. › B60WCONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › en una vía de circulación.
B62D6/00B62D […] › Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00).
G05D1/02G […] › G05CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Procedimiento y aparato para la utilización de un sistema automático de seguimiento del carril para mantener la separación lateral del vehículo La presente revelación globalmente se refiere a la conducción de vehículos. Más particularmente, la revelación se refiere a la utilización de sistemas automáticos de seguimiento del carril conocidos para ajustar la posición de un vehículo dentro del carril actualmente ocupado por el vehículo en respuesta a un vehículo o bien un obstáculo detectado en un carril adyacente. ANTECEDENTES E07748228 25-10-2011 Actualmente, son conocidos los sistemas automáticos los cuales ayudan a asegurar que un vehículo permanece en un carril de conducción pretendido. Normalmente la función de apoyo al seguimiento del carril (también referido en este documento como "sistema de seguimiento del carril" causa que el vehículo adopte una posición central dentro del carril de conducción como una posición de conducción óptima. Un ejemplo de un sistema de este tipo se describe en la patente americana US Nº 5,913,375 la cual está asignada a favor de Masao Nishikawa el 22 de junio de 1999 (de aquí en adelante en este documento referida como "la patente `375). La figura 1 ilustra los componentes del sistema de seguimiento del carril ejemplar descrito en la patente `375. Puesto que la patente `375 se incorpora completamente en este documento, no se repetirá una descripción detallada de la función de cada componente de la figura 1. En la parte pertinente, la figura 1 muestra los siguientes componentes: una cámara de televisión de un dispositivo de carga acoplada (CCD) 10 montada en el vehículo para capturar una vista de la carretera por delante de las líneas que incluyen el vehículo cuya función es marcar los límites de los carriles de conducción; radares delantero y lateral/trasero 12a y 12b, respectivamente (los radares traseros no están representados en la figura 1), montados en el vehículo para detectar la presencia de obstáculos tales como otros vehículos en carriles adyacentes; y un conjunto de control 60 el cual procesa los datos obtenidos por los componentes anteriormente mencionados y provee una señal de salida la cual es utilizada para dirigir el vehículo y mantener el vehículo centrado dentro de un carril de conducción particular sin la intervención del conductor. Las figuras 2a y 2b ilustran un esquema ejemplar más detallado del conjunto de control de la figura 1, como se describe en la patente `375. El esquema de las figuras 2a y 2b muestra que el conjunto de control 60 incluye un microprocesador central CPU1 el cual procesa los datos obtenidos por la cámara 10. (Estos datos se pueden referir aquí colectivamente como un ejemplo de "información de los límites del carril ocupado" porque esencialmente representan la ubicación de las líneas del carril exteriores del carril de conducción actualmente ocupado por el vehículo). Un microprocesador central CPU2 procesa los datos obtenidos por los radares laterales 12b en combinación con la salida de la CPU1 y genera la señal de salida utilizada para dirigir el vehículo (como se ha mencionado antes) a través de un amplificador del motor 62 y el motor de polarización 34. La figura 3 ilustra un ejemplo de los parámetros de los límites del carril de conducción analizados por el conjunto de control de la figura 1 como se describe en la patente `375. En la figura 3, "N" representa las líneas del carril exteriores del carril de conducción actual "M" representa la línea de conducción central deseada dentro del carril, "L" representa la distancia entre la línea exterior del carril y la línea de conducción central deseada y "L" y "V" permiten que el sistema de seguimiento del carril mantenga la pista de cómo se orienta el vehículo con respecto a la línea de conducción deseada. En resumen, el sistema de seguimiento del carril de la patente `375 utiliza los parámetros ilustrados en la figura 3 para mantener el vehículo a lo largo de la línea de conducción deseada "M". La presente revelación aprecia el hecho de que, los sistemas tales como el ejemplo descrito en la patente `375 no tienen en cuenta los vehículos o bien otros objetos en carriles adyacentes al carril actualmente ocupado por el vehículo. Si un vehículo está presente en el carril adyacente y especialmente si los carriles son estrechos y la distancia lateral entre los vehículos es pequeña, un desplazamiento lateral del vehículo que transporta el sistema en su propio carril ("ocupado") es deseable para aumentar la distancia lateral alejándolo del vehículo adyacente. Además, las funciones de seguimiento del carril independientes ("sistemas de seguimiento del carril") se desacoplan cuando el indicador de la señal de cambio de dirección se acciona lo que significa que el conductor desea cambiar de carril. Por lo tanto, los sistemas conocidos no proporcionan aviso a un conductor que cambia de carril de los posibles obstáculos en la nueva posición de conducción, tales como otro vehículo. Por lo tanto, lo que se necesita es un procedimiento y un aparato que supere las limitaciones anteriormente mencionadas en la técnica anterior. El documento WO 06/037445 A revela un procedimiento y un dispositivo para avisar a un conductor o intervenir activamente en la dinámica del movimiento del vehículo en el caso de que el vehículo se arriesgue a dejar un carril. Para el vehículo se define una o más distancias de seguridad las cuales se refieren a los límites del carril. Las distancias de seguridad se pueden adaptar individualmente según la condición del tráfico o el comportamiento de conducción. La posición del vehículo en el carril se puede ajustar según valores de la distancia de seguridad que varían. Particularmente, el tráfico que se mueve en la misma dirección paralela al vehículo o el tráfico que sobrepasa puede ser considerado para la determinación de nuevos valores de la distancia de seguridad. 2 El documento DE 10 2004 054 720 A1 revela un procedimiento para evitar la colisión de un vehículo. El sistema determina una trayectoria objetivo para el vehículo cuando un probable socio de la colisión se aproxima al vehículo. El sistema principalmente acopla los frenos del vehículo para evitar la colisión pero también puede intervenir en la dirección. El conductor puede invalidar las acciones del sistema manualmente. El documento EP- A - 1 457 947 revela un aparato que comprende un módulo de apoyo al adelantamiento para dar apoyo al conductor del vehículo. El sistema recoge información adicional mirando por delante del vehículo, para tener en cuenta por ejemplo travesías que se aproximan, cruces de calles y otros parámetros. El documento WO 03/091818 A revela una ayuda de guía lateral para vehículos a motor en la que objetos en un carril adyacente son supervisados y la posición lateral del vehículo se cambia dependiendo de un objeto detectado en un carril adyacente. Por ejemplo, cuando otro vehículo sobrepasa al vehículo, el vehículo puede ser movido alejándolo en su distancia lateral del vehículo que sobrepasa. La posición lateral real es una función de una o más distancias laterales del objeto detectado en el carril adyacente, el tamaño y el tipo del objeto, la posición del objeto en el carril adyacente, la velocidad del objeto, la distancia del objeto, etcétera. RESUMEN La invención se describe mediante las reivindicaciones independientes. Mejoras y desarrollos adicionales se describen en las otras reivindicaciones. Según una forma de realización de la presente invención, un vehículo es conducido utilizando primero un sistema de seguimiento del carril para detectar objetos en carriles adyacentes al carril ocupado por el vehículo y entonces ajustar la posición del vehículo dentro del carril ocupado, con relación a por lo menos un objeto detectado. Una posición diferente en el carril deseado es aplicada por el sistema de seguimiento del carril sobre la base de la consideración de la distancia lateral a otro objeto en un carril adyacente mediante la modificación de los parámetros en el algoritmo de apoyo al seguimiento del carril y mediante la realización: - el aviso al conductor del vehículo que el cambio desde el carril ocupado puede resultar en una colisión con un objeto detectado, en el que las etapas de detección y aviso no se inhabilitan cuando se posibilita el indicador de la señal de cambio de dirección del vehículo, si puede resultar una colisión con un objeto detectado a partir del cambio de carril; y - en el que las etapas de la detección y el aviso se inhabilitan cuando se posibilita el indicador de la señal de cambio de dirección del vehículo, si no se detectan objetos en el carril adyacente significado por el conductor a través del indicador de la señal de cambio de dirección. BREVE DESCRIPCIÓN DE LOS DIBUJOS E07748228 25-10-2011 La figura... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para pilotar un vehículo que comprende: - la detección de objetos en carriles adyacentes a un carril ocupado por el vehículo que utiliza un sistema de seguimiento del carril; - el ajuste, con relación a por lo menos un objeto detectado, de la posición lateral del vehículo dentro del carril ocupado, en donde se aplica una posición diferente en el carril deseado mediante el sistema de seguimiento del carril sobre la base de la consideración de la distancia lateral a otro objeto en un carril adyacente mediante la modificación los parámetros en el algoritmo de apoyo al seguimiento del carril, caracterizado porque - en un primer nivel de interacción con el conductor con relación a la información, el sistema de seguimiento del carril informa al conductor de la presencia de un vehículo en el área lateral de ambos lados del propio vehículo; - en un segundo nivel de interacción con el conductor con relación a la precaución, cuando se detecta un vehículo en el área lateral y el conductor está utilizando el indicador de la señal de cambio de dirección, el sistema de seguimiento del carril avisa al conductor a través de un canal de aviso seleccionado; y - en un tercer nivel de interacción con el conductor con relación a la intervención de aviso/activa, cuando existe un riesgo de colisión lateral debido al cambio de carril, se proporciona una acción de dirección correctiva o en caso de modo de aviso únicamente el sistema de seguimiento del carril avisa al conductor hápticamente a través del volante. 2. El procedimiento de la reivindicación 1 caracterizado porque los objetos son uno de otro vehículo y de una estructura de la carretera. 3. El procedimiento de la reivindicación 1 adicionalmente comprendiendo la etapa de: avisar al conductor del vehículo que el cambio desde el carril ocupado puede resultar en una colisión con un objeto detectado. 4. El procedimiento de la reivindicación 3 caracterizado porque la etapa de aviso adicionalmente comprende la utilización de retroalimentación al volante. 5. El procedimiento de la reivindicación 4 caracterizado porque la retroalimentación al volante es uno de la vibración del volante y de la aplicación de un momento de torsión al volante. 6. El procedimiento de la reivindicación 5 caracterizado porque el momento de torsión se aplica contra un sentido de giro del volante el cual puede resultar en colisión con el objeto detectado. 7. El procedimiento de la reivindicación 3 en el que las etapas de detección y aviso no se inhabilitan cuando se posibilita un indicador de la señal de cambio de dirección del vehículo, si una colisión con un objeto detectado puede resultar a partir de un cambio de carril. 8. El procedimiento de la reivindicación 1 caracterizado porque la etapa de ajuste adicionalmente comprende las etapas de: - la recepción, a partir del sistema de seguimiento del carril, de información con respecto a los límites del carril ocupado; y - la utilización de la información de los límites recibida para asegurar que la posición del vehículo ajustada permanece dentro del carril ocupado. 9. Un medio legible por ordenador cuyo contenido causa que un sistema de ordenador pilote un vehículo, realizando las etapas de: - la detección de objetos en carriles adyacentes a un carril ocupado por el vehículo que utiliza un sistema de seguimiento del carril; y - el ajuste, con relación a por lo menos un objeto detectado, de la posición lateral del vehículo dentro del carril ocupado, mediante la aplicación de una posición diferente en el carril deseado mediante el sistema de seguimiento del carril sobre la base de la consideración de la distancia lateral a otro objeto en un carril adyacente mediante la modificación de los parámetros en el algoritmo de apoyo al seguimiento del carril, 8 E07748228 25-10-2011 caracterizado porque - en un primer nivel de interacción con el conductor con relación a la información, el sistema de seguimiento del carril informa al conductor de la presencia de un vehículo en el área lateral de ambos lados del propio vehículo; - en un segundo nivel de interacción con el conductor con relación a la precaución, cuando se detecta un vehículo en el área lateral y el conductor está utilizando el indicador de la señal de cambio de dirección, el sistema de seguimiento del carril avisa al conductor a través de un canal de aviso seleccionado; y - en un tercer nivel de interacción con el conductor con relación a la intervención de aviso/activa, cuando existe un riesgo de colisión lateral debido al cambio de carril, se proporciona una acción de dirección correctiva o en caso de modo de aviso únicamente el sistema de seguimiento del carril avisa al conductor hápticamente a través del volante. 10. El medio legible por ordenador de la reivindicación 9 caracterizado porque los objetos son uno de otro vehículo y de una estructura de la carretera. 11. El medio legible por ordenador de la reivindicación 9 adicionalmente comprendiendo la etapa de: avisar al conductor del vehículo que el cambio desde el carril ocupado puede resultar en una colisión con un objeto detectado. 12. El medio legible por ordenador de la reivindicación 11 caracterizado porque la etapa de aviso adicionalmente comprende la utilización de retroalimentación al volante. 13. El medio legible por ordenador de la reivindicación 12 caracterizado porque la retroalimentación al volante es uno de la vibración del volante y de la aplicación de un momento de torsión al volante. 14. El medio legible por ordenador de la reivindicación 13 caracterizado porque el momento de torsión se aplica contra un sentido de giro del volante el cual puede resultar en la colisión. 15. El medio legible por ordenador de la reivindicación 11 en el que las etapas de detección y aviso no se inhabilitan cuando se posibilita un indicador de la señal de cambio de dirección del vehículo, si una colisión con un objeto detectado puede resultar a partir de un cambio de carril. 16. El medio legible por ordenador de la reivindicación 9 caracterizado porque la etapa de ajuste adicionalmente comprende las etapas de: - la recepción, a partir del sistema de seguimiento del carril, de información con respecto a los límites del carril ocupado; y - la utilización de la información de los límites recibida para asegurar que la posición del vehículo ajustada permanece dentro del carril ocupado. 17. Un sistema para pilotar un vehículo, que comprende: - medios para la detección de objetos en carriles adyacentes a un carril ocupado por el vehículo que utiliza un sistema de seguimiento del carril; y - medios para el ajuste, con relación a por lo menos un objeto detectado, de la posición lateral del vehículo dentro del carril ocupado utilizando la información de la detección generada por los medios de detección mediante la aplicación de una posición diferente en el carril deseado mediante el sistema de seguimiento del carril sobre la base de la consideración de la distancia lateral a otro objeto en un carril adyacente mediante la modificación de los parámetros en el algoritmo de apoyo al seguimiento del carril, caracterizado porque - en un primer nivel de interacción con el conductor con relación a la información, el sistema de seguimiento del carril informa al conductor de la presencia de un vehículo en el área lateral de ambos lados del propio vehículo; - en un segundo nivel de interacción con el conductor con relación a la precaución, cuando se detecta un vehículo en el área lateral y el conductor está utilizando el indicador de la señal de cambio de dirección, el sistema de seguimiento del carril avisa al conductor a través de un canal de aviso seleccionado; y - en un tercer nivel de interacción con el conductor con relación a la intervención de aviso/activa, cuando existe un riesgo de colisión lateral debido al cambio de carril, se proporciona una acción de dirección correctiva o en 9 E07748228 25-10-2011 caso de modo de aviso únicamente el sistema de seguimiento del carril avisa al conductor hápticamente a través del volante. 18. El sistema para pilotar un vehículo según la reivindicación 17 caracterizado por: - un sistema de seguimiento del carril; y - un módulo de ajuste del vehículo dentro del carril adaptado para recibir a partir del sistema de seguimiento del carril tanto información con respecto a objetos detectados en carriles adyacentes a un carril ocupado por el vehículo como información con respecto a los límites del carril ocupado; el módulo de ajuste del vehículo dentro del carril utilizando la información recibida para proveer una señal de salida utilizada para ajustar una posición lateral del vehículo dentro del carril ocupado con relación a por lo menos un objeto detectado mediante la aplicación de una posición diferente en el carril deseado mediante el sistema de seguimiento del carril sobre la base de la consideración de una distancia lateral a otro objeto en un carril adyacente mediante la modificación de los parámetros en el algoritmo de apoyo del seguimiento del carril. 19. El sistema para pilotar un vehículo según la reivindicación 18 caracterizado por: - un procesador asociado con el sistema de seguimiento del carril; - un segmento de memoria legible por ordenador adaptado para ser conectado al procesador; - un módulo de ajuste del vehículo dentro del carril incluido en el interior de la memoria legible por el ordenador, el módulo de ajuste del vehículo dentro del carril comprendiendo segmentos de códigos de programas de ordenador los cuales, cuando son ejecutados por el procesador, implanta las siguientes etapas: - la detección de objetos en carriles adyacentes a un carril ocupado por el vehículo que utiliza un sistema de seguimiento del carril; y - el ajuste, con relación a por lo menos un objeto detectado, de una posición lateral del vehículo dentro del carril ocupado, mediante la aplicación de una posición diferente en el carril deseado mediante el sistema de seguimiento del carril sobre la base de la consideración de la distancia lateral a otro objeto en un carril adyacente mediante la modificación de los parámetros en el algoritmo de apoyo al seguimiento del carril. E07748228 25-10-2011 11 PANEL DE CONTROL E07748228 25-10-2011 12 E07748228 25-10-2011 13 E07748228 25-10-2011 14 E07748228 25-10-2011 E07748228 25-10-2011 16 E07748228 25-10-2011 17 E07748228 25-10-2011 18 E07748228 25-10-2011
Patentes similares o relacionadas:
PLATAFORMA OMNIDIRECCIONAL, del 11 de Febrero de 2019, de UNIVERSITAT POLITECNICA DE CATALUNYA: Plataforma omnidireccional.
Plataforma que comprende un primer módulo con una primera rueda motriz y una segunda rueda motriz enfrentadas […]
PLATAFORMA OMNIDIRECCIONAL Y TRANSPORTADOR OMNIDIRECCIONAL, del 29 de Enero de 2019, de UNIVERSITAT POLITECNICA DE CATALUNYA: Plataforma omnidireccional y transportador omnidireccional.
Plataforma omnidireccional que comprende un primer módulo con al menos de una […]
Sistema de control de vehículo para controlar la dirección del vehículo, del 21 de Septiembre de 2016, de Thunder Power New Energy Vehicle Development Company Limited: Un sistema de control para controlar la dirección de un aparato de conducción, en el que el sistema está caracterizado por:
un dispositivo de proyección […]
Procedimiento para la conducción autónoma en un túnel de lavado y automóvil correspondiente, del 11 de Marzo de 2015, de AUDI AG: Procedimiento para la conducción autónoma de un automóvil en un túnel de lavado, caracterizado por:
- la detección de un pasillo del túnel de lavado,
- la detección […]
Procedimientos de ayuda a la salida de estacionamiento de un vehículo, del 16 de Mayo de 2012, de PEUGEOT CITROEN AUTOMOBILES SA: Procedimiento de ayuda para la salida de estacionamiento de un vehículo , que comprende una evaluación de la distancia (DL) entre dicho vehículo […]
PROCEDIMIENTO Y DISPOSITIVO PARA DIRIGIR UN VEHICULO SIN CONTACTO CON LA VIA, del 21 de Mayo de 2010, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Un vehículo que no entra en contacto con un raíl que comprende:
ruedas ;
un cuerpo principal del vehículo soportado por dichas ruedas ; […]
PROCEDIMIENTO Y DISPOSITIVO PARA CONDUCIR UN VEHICULO AUTOMOVIL HACIA UNA POSICION DE DESTINO., del 1 de Abril de 2007, de DAIMLERCHRYSLER AG: Procedimiento para conducir un vehículo automóvil hacia una posición de destino; a este efecto, el vehículo automóvil es colocado en una posición de partida, situada cerca […]
DISPOSITIVO AUXILIAR DE ESTACIONAMIENTO Y PROCEDIMIENTO PARA LA ASISTENCIA AL ESTACIONAMIENTO, del 1 de Mayo de 2009, de ROBERT BOSCH GMBH: Dispositivo auxiliar de estacionamiento para un vehículo automóvil , comprendiendo el dispositivo auxiliar de estacionamiento una unidad detectora […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Procedimientos de ayuda a la salida de estacionamiento de un vehículo, del 16 de Mayo de 2012, de PEUGEOT CITROEN AUTOMOBILES SA: Procedimiento de ayuda para la salida de estacionamiento de un vehículo , que comprende una evaluación de la distancia (DL) entre dicho vehículo […]
Procedimientos de ayuda a la salida de estacionamiento de un vehículo, del 16 de Mayo de 2012, de PEUGEOT CITROEN AUTOMOBILES SA: Procedimiento de ayuda para la salida de estacionamiento de un vehículo , que comprende una evaluación de la distancia (DL) entre dicho vehículo […]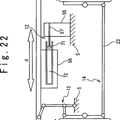 PROCEDIMIENTO Y DISPOSITIVO PARA DIRIGIR UN VEHICULO SIN CONTACTO CON LA VIA, del 21 de Mayo de 2010, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Un vehículo que no entra en contacto con un raíl que comprende:
ruedas ;
un cuerpo principal del vehículo soportado por dichas ruedas ; […]
PROCEDIMIENTO Y DISPOSITIVO PARA DIRIGIR UN VEHICULO SIN CONTACTO CON LA VIA, del 21 de Mayo de 2010, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Un vehículo que no entra en contacto con un raíl que comprende:
ruedas ;
un cuerpo principal del vehículo soportado por dichas ruedas ; […]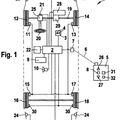 DISPOSITIVO AUXILIAR DE ESTACIONAMIENTO Y PROCEDIMIENTO PARA LA ASISTENCIA AL ESTACIONAMIENTO, del 1 de Mayo de 2009, de ROBERT BOSCH GMBH: Dispositivo auxiliar de estacionamiento para un vehículo automóvil , comprendiendo el dispositivo auxiliar de estacionamiento una unidad detectora […]
DISPOSITIVO AUXILIAR DE ESTACIONAMIENTO Y PROCEDIMIENTO PARA LA ASISTENCIA AL ESTACIONAMIENTO, del 1 de Mayo de 2009, de ROBERT BOSCH GMBH: Dispositivo auxiliar de estacionamiento para un vehículo automóvil , comprendiendo el dispositivo auxiliar de estacionamiento una unidad detectora […]