PROCEDIMIENTO Y APARATO PARA DETERMINAR LA UBICACIÓN UTILIZANDO UNA ESTIMACIÓN DE LA POSICIÓN APROXIMADA.
Un procedimiento para identificar la posición de un dispositivo (201) operable para recibir señales procedentes de un transmisor (203),
que comprende: a) recibir (401), en un dispositivo (207) de identificación de la posición, una estimación de la posición aproximada para el dispositivo (201), y b) recibir, en el dispositivo (207) de identificación de la posición, información que identifica datos utilizados para calcular la estimación de la posición aproximada, caracterizado por: c) calcular (407) un error (215) de pseudoalcance al proyectar un vector (209) de error de la posición del transmisor formado entre un primer punto (203) y un segundo punto (205) sobre un vector unitario (211) definido a partir del primer punto (203) en la dirección de un tercer punto, en el que el primer punto (203) es una primera estimación de la posición del transmisor, el segundo punto (205) es una segunda estimación de la posición del transmisor, y el tercer punto es una estimación de la posición del dispositivo (201), de la posición del dispositivo (207) de identificación de la posición, o de la posición de una estación base con la que está en comunicación el dispositivo (201); y d) aplicar (409) el error (215) de pseudoalcance a un algoritmo de estimación lineal para calcular una desviación (δû) a partir de la estimación de la posición aproximada y para identificar una estimación más precisa de la posición
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2002/001798.
Solicitante: QUALCOMM INCORPORATED.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5775 MOREHOUSE DRIVE SAN DIEGO, CA 92121-1714 ESTADOS UNIDOS DE AMERICA.
Inventor/es: VAYANOS, ALKINOOS, GAAL,PETER.
Fecha de Publicación: .
Fecha Solicitud PCT: 17 de Enero de 2002.
Clasificación Internacional de Patentes:
- G01S19/09 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › proporcionando recursos de procesamiento normalmente llevado a cabo por el receptor.
- G01S19/40 G01S 19/00 […] › Corrección de la posición, de la velocidad o de la actitud.
Clasificación PCT:
- G01S19/40 G01S 19/00 […] › Corrección de la posición, de la velocidad o de la actitud.
Clasificación antigua:
- G01S1/02 G01S […] › G01S 1/00 Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00). › usando ondas de radio (G01S 19/00 tiene prioridad).
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2360280_T3.pdf
Fragmento de la descripción:
Antecedentes de la invención
I. Campo de la invención
La presente invención versa acerca de la ubicación de un dispositivo. Más en particular, la presente invención versa acerca de un procedimiento y un aparato para determinar la ubicación de un dispositivo utilizando una estimación de la posición aproximada del dispositivo y estimaciones de la ubicación de transmisores utilizados para determinar esa estimación aproximada.
II. Descripción de la técnica relacionada
Un medio habitual mediante el cual localizar un dispositivo es para determinar la cantidad de tiempo requerido para que señales transmitidas desde múltiples fuentes en ubicaciones conocidas alcancen un receptor dentro del dispositivo que va a ser localizado. Un sistema que proporciona señales desde una pluralidad de transmisores de ubicación conocida es el bien conocido sistema de satélites de posicionamiento global (GPS). La posición de los satélites en el sistema GPS puede ser identificada mediante varias informaciones distintas, algunas más precisas que otras. Por ejemplo, se puede realizar una determinación razonablemente precisa de la localización de un satélite de GPS si se conoce la hora del día en la que está disponible un conjunto de información, conocida como “Efeméride”. Las transmisiones procedentes de cada satélite proporcionan la hora del día y la Efeméride para el satélite transmisor particular. La Efeméride proporciona información que define las órbitas de los satélites particulares desde los que se recibió la Efeméride.
Además, todos los satélites transmiten otro conjunto de información, denominada “Almanaque”. El Almanaque incluye información menos precisa acerca de la ubicación de todos los satélites en la “constelación”. Tanto la información de Almanaque como de Efeméride es válida durante una cantidad limitada de tiempo. Se considera que la información de Almanaque es precisa hasta aproximadamente 3 kilómetros durante aproximadamente una semana desde el momento en el que se transmite el Almanaque. La Efeméride proporciona información acerca de las órbitas de los satélites con una precisión de aproximadamente 1 metro durante un periodo de tiempo igual a aproximadamente 2 horas. Los errores tanto en la información de Almanaque como en la información de Efeméride aumentan según aumenta la antigüedad de los datos. En consecuencia, la información acerca de la ubicación de los satélites es cada vez menos precisa según aumenta la antigüedad del Almanaque y de la Efeméride, a no ser que se reciba información actualizada a intervalos apropiados de tiempo.
Sin información precisa acerca de la ubicación de los satélites, la ubicación determinada en base a la recepción de señales transmitidas desde los satélites será imprecisa. Por lo tanto, es necesario recibir actualizaciones del satélite o, de forma alternativa, de una fuente alternativa. Una fuente alternativa tal es una estación base de un sistema de comunicaciones inalámbricas que tiene un receptor de GPS capaz de obtener la información requerida de los satélites de GPS. Sin embargo, que el dispositivo sea localizado para obtener la información a intervalos regulares consume recursos valiosos, tales como energía requerida para recibir la información, y ancho de banda requerido para transmitir la información desde una fuente remota hasta el dispositivo. En consecuencia, en la actualidad existe la necesidad de un medio mediante el cual se puedan llevar a cabo determinaciones precisas de la posición de un receptor con un consumo mínimo de recursos. Esta necesidad es particularmente aguda cuando se utilizan sistemas en los que los transmisores se mueven con el paso del tiempo y la ubicación de tales transmisores es conocida de forma precisa únicamente tras recibir actualizaciones procedentes de una fuente remota al dispositivo que lleva a cabo el cálculo de la localización. El procedimiento y el aparato dados a conocer en el presente documento satisfacen esta necesidad.
El documento US 6104978 describe un sistema de seguimiento de bienes por GPS (un automotor y una estación central) que opera al transmitir una posición aproximada del automotor a la estación central y al calcular una posición precisa utilizando las efemérides precisas de satélite y diferencias medidas del tiempo de transmisión derivadas nuevamente de la posición aproximada recibida del automotor en la estación central.
Resumen de la invención
En un aspecto de la invención, se proporciona un procedimiento para identificar la posición de un dispositivo como se expone en la reivindicación 1.
En otro aspecto de la invención, se proporciona un dispositivo de identificación de la posición como se expone en la reivindicación 8.
El procedimiento y el aparato dados a conocer en el presente documento permiten que se calcule la ubicación de un dispositivo de recepción del pseudoalcance (es decir, una estimación de la posición aproximada) utilizando información menos precisa. En un caso, la información menos precisa es el Almanaque o la Efeméride obsoletos. Como se ha hecho notar anteriormente, la información de Almanaque y de Efeméride proporciona la ubicación de la posición de los transmisores de la ubicación, tal como satélites de GPS. El uso de ubicaciones imprecisas para los transmisores provoca errores en la determinación de la ubicación del dispositivo de recepción del pseudoalcance.
Según el procedimiento y el aparato dados a conocer en el presente documento, las correcciones a la estimación de la posición aproximada del dispositivo de recepción del pseudoalcance se llevan a cabo en una ubicación remota en la que hay disponible información más precisa. De forma alternativa, se pueden llevar a cabo tales correcciones en un momento remoto cuando hay disponible información más precisa. El procedimiento y el aparato dados a conocer dependen del conocimiento de los errores presentes en la información menos precisa (por ejemplo, el Almanaque y/o Efeméride antiguos) utilizada para calcular la estimación de la posición aproximada.
Una ventaja del procedimiento y del aparato dados a conocer es que se puede transmitir o almacenar una estimación aproximada de localización de la posición y una identificación suficiente de la información para calcular la estimación de la posición aproximada en mensajes relativamente cortos. En cambio, requiere mayor ancho de banda para transmitir a una ubicación que tiene información más precisa, las mediciones necesarias para calcular una estimación más precisa de la localización. De forma similar, requiere mayor capacidad de almacenamiento para almacenar las mediciones hasta que haya disponible información más precisa. En consecuencia, la presente invención proporciona un procedimiento y un aparato para ahorrar bien memoria o bien ancho de banda en el cálculo de estimaciones de la posición cuando no hay disponible información precisa en el momento o el lugar en el que se tomaron las mediciones.
Breve descripción de los dibujos
Las características, los objetivos y las ventajas de la presente invención serán evidentes a partir de la descripción detallada expuesta a continuación cuando sea tomada junto con los dibujos en los que los números similares de referencia identifican elementos correspondientes en todo el documento y en los que:
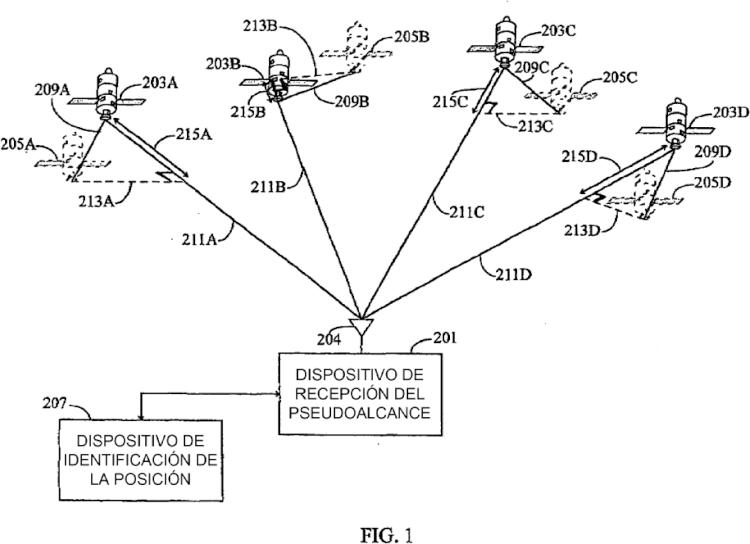
La FIG. 1 es una ilustración simplificada de un sistema que incluye un dispositivo de recepción del pseudoalcance dado a conocer en el presente documento.
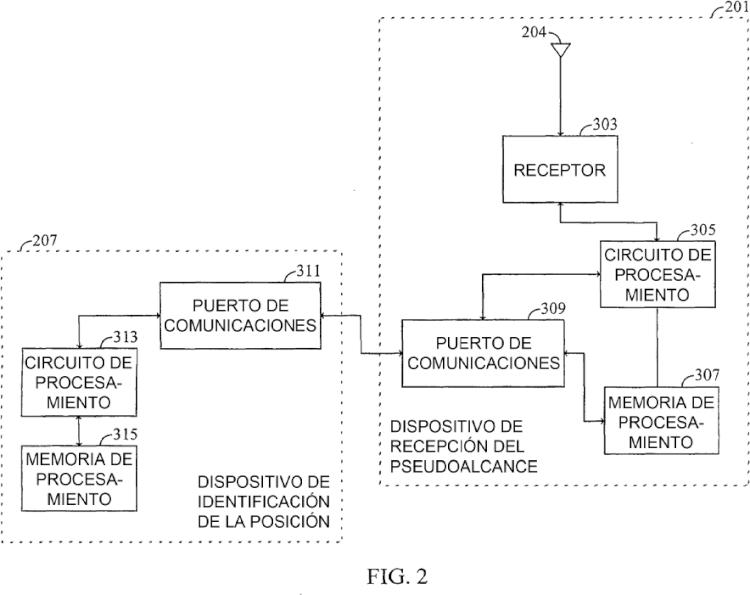
La FIG. 2 es un diagrama simplificado de bloques de un dispositivo de recepción del pseudoalcance y un dispositivo de identificación de la posición según el procedimiento y el aparato dados a conocer.
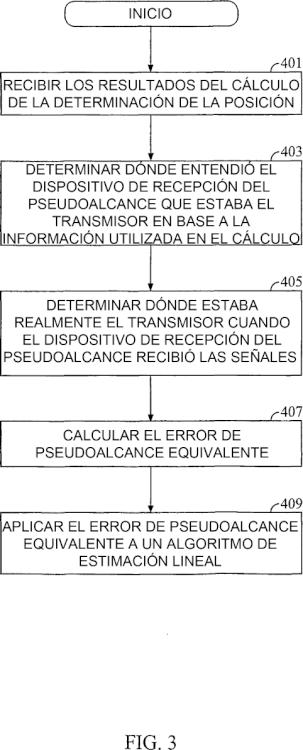
La FIG. 3 es un diagrama de flujo que ilustra el procedimiento mediante el cual el dispositivo de identificación de la posición determina una estimación más precisa de la posición (es decir, la ubicación del dispositivo de recepción del pseudoalcance) en base a una estimación de la posición aproximada calculada en el dispositivo de recepción del pseudoalcance.
Descripción detallada de realizaciones preferentes
La Figura 1 es una ilustración simplificada de un sistema que incluye un dispositivo 201 de recepción del pseudoalcance dado a conocer en el presente documento. El dispositivo 201 de recepción del pseudoalcance recibe señales transmitidas por una pluralidad de transmisores 203a-203d (a los que se hace referencia colectivamente utilizando el número... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para identificar la posición de un dispositivo (201) operable para recibir señales procedentes de un transmisor (203), que comprende:
a) recibir (401), en un dispositivo (207) de identificación de la posición, una estimación de la posición aproximada para el dispositivo (201), y
b) recibir, en el dispositivo (207) de identificación de la posición, información que identifica datos utilizados para calcular la estimación de la posición aproximada, caracterizado por:
c) calcular (407) un error (215) de pseudoalcance al proyectar un vector (209) de error de la posición del transmisor formado entre un primer punto (203) y un segundo punto (205) sobre un vector unitario (211) definido a partir del primer punto (203) en la dirección de un tercer punto, en el que el primer punto (203) es una primera estimación de la posición del transmisor, el segundo punto (205) es una segunda estimación de la posición del transmisor, y el tercer punto es una estimación de la posición del dispositivo (201), de la posición del dispositivo (207) de identificación de la posición, o de la posición de una estación base con la que está en comunicación el dispositivo (201); y
d) aplicar (409) el error (215) de pseudoalcance a un algoritmo de estimación lineal para calcular una
desviación uˆ a partir de la estimación de la posición aproximada y para identificar una estimación más
precisa de la posición.
2. El procedimiento de la reivindicación 1, en el que:
la estimación de la posición aproximada se calcula en base a estimaciones de la posición de los transmisores (203A-203D) y al momento de llegada de señales transmitidas por los transmisores (203A203D); y
la información comprende datos utilizados para calcular la estimación de la posición aproximada.
3. El procedimiento de la reivindicación 1, en el que los datos utilizados para calcular la estimación de la posición aproximada es un Almanaque.
4. El procedimiento de la reivindicación 1, en el que los datos utilizados para calcular la estimación de la posición aproximada es una Efeméride.
5. El procedimiento de la reivindicación 1, en el que se almacena la estimación de la posición aproximada hasta que hay disponibles datos más precisos que los datos utilizados para calcular la estimación de la posición aproximada.
6. El procedimiento de la reivindicación 1, en el que el dispositivo (201) es un dispositivo (201) de recepción del pseudoalcance.
7. El procedimiento de la reivindicación 6, en el que el dispositivo (207) de identificación de la posición es remoto con respecto al dispositivo (201) en el que se calcularon las estimaciones de la posición aproximada.
8. Un dispositivo (207) de identificación de la posición que comprende:
a) un receptor (311); y
b) un procesador (315) acoplado al receptor (311) y configurado para aceptar estimaciones de la posición aproximada de un dispositivo (201) operable para recibir señales procedentes de un transmisor
(203) e información que identifica los datos utilizados para calcular las estimaciones de la posición aproximada, y para calcular una estimación más precisa de la posición para el dispositivo (201) a partir de datos utilizados para calcular las estimaciones de la posición aproximada y estimaciones recibidas de la posición aproximada, caracterizado porque:
el procesador (315) es operable para calcular la estimación más precisa de la posición al:
calcular (407) un error (215) de pseudoalcance al proyectar un vector (209) de error de la posición del transmisor formado entre un primer punto (203) y un segundo punto (205) sobre un vector unitario (211) definido a partir del primer punto (203) en la dirección de un tercer punto, en el que el primer punto (203) es una primera estimación de la posición del transmisor, el segundo punto (205) es una segunda estimación de la posición del transmisor, y el tercer punto es una estimación de la posición del dispositivo (201), de la posición del dispositivo (207) de identificación de la posición, o de la posición de una estación base con la que está en comunicación el dispositivo (201); y
aplicar (409) el error (215) de pseudoalcance a un algoritmo de estimación lineal para calcular una desviación uˆ a partir de la estimación de la posición aproximada y para identificar la estimación más precisa de la posición.
9. Un sistema que comprende: un dispositivo (207) de identificación de la posición según la reivindicación 8; y un dispositivo (201) de recepción del pseudoalcance, en el que se calculan las estimaciones de la posición aproximada en el dispositivo (201) de recepción del
pseudoalcance.
10. El sistema de la reivindicación 9, en el que las estimaciones de la posición aproximada se calculan en base a estimaciones de la posición de los transmisores (203A-203D) y al momento de llegada de señales transmitidas por los transmisores (203A-203D).
Patentes similares o relacionadas:
Procedimiento y sistema para recuperar datos de localización de un objeto a lo largo del tiempo utilizando un receptor GNSS para anti falsificación, y receptor y lector de señales en el espacio para dicho procedimiento y sistema, del 14 de Agosto de 2019, de Folkers, Willem: Procedimiento para reducir un riesgo de manipulación y/o falsificación de datos de localización de un objeto a lo largo del tiempo, comprendiendo el procedimiento […]
Autenticación basada en bits aleatorios de mensajes de navegación satelital, del 26 de Julio de 2017, de THE BOEING COMPANY: Un método para autenticar ubicaciones, que comprende los pasos de: demodular una pluralidad de señales de navegación satelital de cliente recibidas […]
 Triangulación con sensores coposicionados, del 13 de Enero de 2016, de METIS DESIGN CORPORATION: Un método de detección de un suceso en una estructura mecánica, por medio de sensores y al menos un actuador , comprendiendo el método:
generar en […]
Triangulación con sensores coposicionados, del 13 de Enero de 2016, de METIS DESIGN CORPORATION: Un método de detección de un suceso en una estructura mecánica, por medio de sensores y al menos un actuador , comprendiendo el método:
generar en […]
Procedimiento para proporcionar una indicación de tiempo-y-ubicación autenticable, del 16 de Abril de 2014, de THE EUROPEAN UNION, REPRESENTED BY THE EUROPEAN COMMISSION: Procedimiento para proporcionar una indicación de tiempo-y-ubicación autenticable usando un receptor de señales de radionavegación, comprendiendo dicho procedimiento […]
Sistema de distribución telefónica inalámbrica con transmisión con diversidad en tiempo y en espacio, del 28 de Agosto de 2013, de INTEL CORPORATION: Un método para su uso por una estación de transferencia celular de acceso múltiple por división de código,CDMA, que tiene una primera y una segunda antena […]
Procedimiento mejorado para la estimación TDOA y el FDOA en un sistema de localización inalámbrico, del 24 de Agosto de 2012, de TRUEPOSITION, INC.: Un procedimiento usado en la localización de un transmisor móvil, que comprende: a. proporcionar un conjunto de valores de correlación cruzada, en el que cada valor […]
 Procedimiento de localización geográfica de un terminal conectado a una red de telecomunicaciones, del 11 de Julio de 2012, de FRANCE TELECOM: Procedimiento de localización geográfica de un terminal conectado a una red de telecomunicaciones, que incluye:
- una etapa (D10, E10) de recepción […]
Procedimiento de localización geográfica de un terminal conectado a una red de telecomunicaciones, del 11 de Julio de 2012, de FRANCE TELECOM: Procedimiento de localización geográfica de un terminal conectado a una red de telecomunicaciones, que incluye:
- una etapa (D10, E10) de recepción […]
Procedimiento y aparato para mejorar la precisión de radiolocalización con mediciones, del 3 de Mayo de 2012, de QUALCOMM INCORPORATED: Un procedimiento de determinación de una estimación de posición para un terminal inalámbrico , que comprende: obtener información de dominio de estado para […]