PROCEDIMIENTO Y APARATO PARA CONTROL DE BAJA VELOCIDAD DE MOTORES DE RELUCTANCIA.
Se desvela un procedimiento y aparato para control de baja velocidad de motores de reluctancia,
que ofrece una unidad microcontroladora (UMC), que tiene una correspondencia incorporada que permite que un tiempo de enganche de fase particular corresponda a una velocidad del motor específica; un módulo de control, que permite que los usuarios introduzcan una velocidad del motor; un contador, conectado eléctricamente a la UMC; y al menos un interruptor cíclico óptico, que genera una señal de interrupción cíclica óptica para la detección de una posición de rotación del motor. La UMC lee la señal de interrupción cíclica óptica para identificar la fase inicial del motor. Una velocidad del motor es convertida a un tiempo de enganche de fase correspondiente por la UMC, donde el tiempo de enganche de fase se cuenta hacia atrás mediante el contador hasta el final. Y la UMC activa el motor para pasar de la fase inicial a la siguiente fase.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030524.
Solicitante: YA HORNG ELECTRONIC CO. LTD..
Nacionalidad solicitante: Taiwan, Provincia de China.
Dirección: NO. 35 ZSHA LUN, JON ZSHA VILLAGE, ANTIN HSIANG TAINAN HSIEN, TAIWAN.
Inventor/es: HUANG,JIN YI, LIAO,Kun-fu, YU,Fu-wen.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02P23/03 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 23/00 Disposiciones o métodos para el control de motores de corriente alterna que se caracterizan por un método de control que no sea control por vector. › especialmente adaptados para velocidades muy bajas.
- H02P25/08 H02P […] › H02P 25/00 Disposiciones o métodos para el control de motores de corriente alterna caracterizados por la clase de motor de corriente alterna o por detalles estructurales. › Motores de reluctancia.
Fragmento de la descripción:
PROCEDIMIENTO Y APARATO PARA CONTROL DE BAJA VELOCIDAD DE MOTORES DE RELUCTANCI.
ANTECEDENTES DE LA INVENCIÓN
Campo de la invención La presente invención se refiere en general a un procedimiento y aparato para control de baja velocidad de motores de reluctancia y más específicamente a uno que ofrece
estabilidad de rotación a baja velocidad, libre de
oscilaciones significativas de baja frecuencia o
inestabilidad en la rotación.
Descripción de la técnica anterior
Los procedimientos anteriores para control de baja
velocidad de motores de reluctancia están sometidos al control de rotación del motor a baja velocidad por medio de un controlador proporcional-integral (PI) , donde el controlador PI ofrece una combinación de control de proporcionalidad y control de integración. Y el PI detecta el tiempo para la conmutación de fase del motor con voltaje o corriente eléctrica como compensación. Sin embargo, este enfoque del control de estabilidad de rotación de motores con voltaje o corriente eléctrica como compensación es propenso a exceder el valor establecido de voltaje o corriente cuando se ajusta para aumentar o disminuir. Y es probable que se produzcan defectos como oscilaciones significativas de baja frecuencia o inestabilidad en la rotación una vez que un motor sufre diferencia considerable de velocidad ya que el voltaje o corriente eléctrica varía comúnmente.
RESUMEN DE LA INVENCIÓN
A la luz de los inconvenientes anteriormente mencionados de la técnica anterior, este inventor concibió la idea para la mejora avanzada, y finalmente los esfuerzos dieron origen a la presente invención.
El objetivo de la presente invención es proporcionar un procedimiento y aparato para control de baja velocidad de motores de reluctancia, capaces de mantener la estabilidad de rotación a baja velocidad.
Para lograr el objetivo anteriormente mencionado, se desvela más detalladamente un procedimiento para control de baja velocidad de motores de reluctancia de la presente invención, donde las etapas del procedimiento incluyen: establecer una velocidad del motor, establecer un tiempo de sincronización o enganche de fase (phase-lock) de la rotación del motor, realizar una cuenta atrás del tiempo de enganche de fase hasta su final y accionar un rotor del motor para que gire hasta una fase específica.
Para lograr de nuevo el objetivo mencionado anteriormente, se desvela un aparato para control de baja velocidad de motores de reluctancia de la presente invención, donde el aparato comprende: una unidad microcontroladora (UMC) , que tiene un circuito de control para controlar la conmutación de fase del motor, y la UMC ofrece un tiempo de enganche de fase preestablecido que corresponde a una velocidad del motor específica; un contador, conectado eléctricamente a la UMC; y un interruptor cíclico óptico, para detectar una posición de rotación del rotor y el tiempo transcurrido correspondiente. La UMC lee una señal del interruptor cíclico óptico para determinar la posición de enganche de fase del motor en el momento. Se permite que los usuarios introduzcan el valor de una velocidad del motor por medio de un módulo de control, que es convertido en un tiempo de enganche de fase correspondiente por la UMC. Cuando la UMC convierte el tiempo de enganche de fase, el contador cuenta hacia atrás el tiempo. Una vez que transcurre el tiempo de enganche de fase en el contador, la UMC pasa a leer la señal del interruptor cíclico óptico para determinar una fase. Cuando la fase es amplificada por la UMC según la señal del interruptor cíclico, el circuito de control ordena al motor que pase a girar desde la fase inicial hasta la siguiente fase. De nuevo, la UMC es cargada con otro tiempo de enganche de fase, y se repiten las etapas precedentes para que el motor gire secuencialmente a través de cada fase, lo que permite la estabilidad de rotación del motor a baja velocidad.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
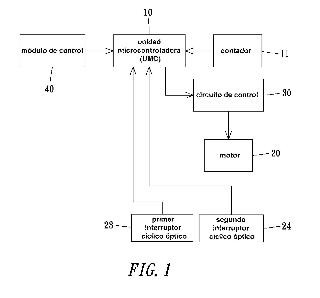
La FIG. 1 es un diagrama de bloques de la estructura de una realización ejemplar de la presente invención;la FIG. 2 es un diagrama esquemático de la estructura del motor de la realización ejemplar de la presente invención;
la FIG. 3 es un organigrama que muestra las etapas del control de baja velocidad del motor de la realización ejemplar de la presente invención;
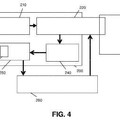
la FIG. 4 es un organigrama que muestra las etapas del accionamiento de un rotor para rotación de la realización ejemplar de la presente invención;
la FIG. 5 es un organigrama que muestra las etapas del control de rotación del motor de la realización ejemplar de la presente invención; y
la FIG. 6 es un organigrama del uso de la realización ejemplar de la presente invención.
DESCRIPCIÓN DETALLADA DE LA INVENCIÓN
Para lograr los objetos anteriormente mencionados de la presente invención, las técnicas adoptadas y la función que se puede lograr se describen detalladas con referencia a las siguientes realizaciones ejemplares y los dibujos adjuntos.
Haciendo referencia a las FIGS. 1 y 2, un aparato para control de baja velocidad de motores de reluctancia de esta invención comprende: una unidad microcontroladora (UMC) 10, un contador 11, y al menos un interruptor cíclico óptico (para esta realización ejemplar están instalados dos: un primer interruptor cíclico óptico 23, un segundo interruptor cíclico óptico 24) y un módulo de control 40.
La UMC 10 es un sistema en un chip (SoC) que está formado integrando los siguientes periféricos: memoria de acceso aleatorio (RAM) , memoria de sólo lectura (ROM) , entrada/salida (E/S) analógica/digital (A/D) , etcétera, en un único chip. La UMC 10 está provista de un circuito de control 30 que permite a la UMC 10 controlar el motor 20 para llevar a cabo rotación de fase. El contador 11 se usa para contar el tiempo transcurrido, y está conectado eléctricamente a la UMC
10.
El primer interruptor cíclico óptico 23 y el segundo interruptor cíclico óptico 24 (mostrados en la FIG. 2) están instalados en una ubicación de detección en un lado del motor20, para la detección de la posición de rotación de un rotor (el ángulo incluido entre el primer interruptor cíclico óptico 23 y el segundo interruptor cíclico óptico 24 podría ser 1ºs siguientes grados : 1 5 , 3 O , 4 5 , 6 O , 7 5 , 9 O , 1 O 5 , 12 O , 5 135, 150, y 165, donde el motor podría ser el tipo de motor de 3 o 4 fases con estator de 8 polos 21 y rotor de 6 polos 22) . En una descripción detallada, la UMC 10 lee las señales emitidas por el primer interruptor cíclico óptico 23 y el segundo interruptor cíclico óptico 24 para identificar la 10 ubicación del rotor del motor 20. Cuando la UMC 10 lee un valor de O a partir de la señal emitida por el primer interruptor cíclico óptico 23 y un valor de O a partir de la señal emitida por el segundo interruptor cíclico óptico 24, el circuito de control 30 activará la fase A del motor (la 15 fase es la ubicación en la que está el rotor en relación con el estator del motor) . Cuando la UMC 10 lee un valor de O a partir de la señal emitida por el primer interruptor cíclico óptico 23 y un valor de 1 a partir de la señal emitida por el segundo interruptor cíclico óptico 24, el circuito de control 20 30 activará la fase B del motor. Cuando la UMC 10 lee un valor de 1 a partir de la señal emitida por el primer interruptor cíclico óptico 23 y un valor de 1 a partir de la señal emitida por el segundo interruptor cíclico óptico 24, el circuito de control 30 activará la fase C del motor. 2 5 Cuando la UMC 1 O lee un valor de 1 a partir de la señal emitida por el primer interruptor cíclico óptico 23 y un valor de O a partir de la señal emitida por el segundo interruptor cíclico óptico 24, el circuito de control 20 activará la fase D del motor. La fase del motor es activada secuencialmente de la manera A~B~c~D, que se usa para controlar la velocidad del motor.
El módulo de control 4 O está conectado a la UMC 1O, donde se permite que los usuarios introduzcan el valor de una velocidad del motor 20 a través del módulo de control 40, que 35 es convertido en un tiempo de enganche de fase correspondiente mediante el programa incorporado de la UMC
10. Una vez que se cuenta el tiempo de enganche de fase por el contador 11, se transmite una señal a la UMC 10, y se permite que el circuito de control 30 de la UMC 10 active el motor 20 para pasar de la fase inicial a la siguiente fase. El enfoque de tiempo de enganche de fase anteriormente mencionado es calculado mediante el programa incorporado de la UMC 1O, lo que significa que un tiempo de enganche de fase particular corresponde a una velocidad del...
Reivindicaciones:
l. Un procedimiento para control de baja velocidad de motores de reluctancia, en el que las etapas del procedimiento comprenden: a.) establecer una velocidad del motor; b.) establecer un tiempo de enganche de fase para una rotación del motor; c.) realizar una cuenta atrás del tiempo de enganche de fase hasta su final, y d.) accionar un rotor del motor para que gire hasta una fase.
2. Procedimiento para control de baja velocidad de motores de reluctancia según la reivindicación 1, en el que las etapas de accionar el rotor para que gire además comprenden: a.) instalar un interruptor cíclico óptico en un lado del motor; b.) leer una señal de interrupción cíclica óptica generada por el interruptor cíclico óptico; c.) identificar una posición relativa del rotor respecto a un estator según la señal de interrupción cíclica óptica; y d.) accionar el rotor para que gire hasta otra fase basándose en el tiempo de enganche de fase.
3. Procedimiento para control de baja velocidad de motores de reluctancia según la reivindicación 1, en el que las etapas del control de la velocidad del motor comprenden: a.) Establecer una correspondencia en la que los tiempos de enganche de fase corresponden a velocidades del motor y las fases corresponden a rotaciones del motor en el motor; b.) convertir una velocidad del motor establecida en un tiempo de enganche de fase; y e.) realizar una cuenta atrás del tiempo de enganche de fase para alterar la fase del rotor, para alcanzar la velocidad del motor establecida.
4. Procedimiento para control de baja velocidad de motores de reluctancia según la reivindicación 3, en el que la cuenta atrás de diferentes tiempos de enganche de fase se usa para alterar la fase del rotor, lo cual se usa para el control de la velocidad del motor.
5. Procedimiento para control de baja velocidad de motores de reluctancia según la reivindicación 1, en el que la fase es la ubicación en la que está el rotor en relación con un estator del motor.
6. Un aparato para control de baja velocidad de motores de reluctancia, que comprende: a.) una unidad microcontroladora (UMC) , para el control de conmutación de fase del motor; b.) un contador, usado para contar el tiempo, conectado eléctricamente a la UMC; c.) al menos un interruptor cíclico óptico, para la detección
de la posición de rotación del motor, donde la UMC lee una
señal de interrupción cíclica óptica para identificar una
fase inicial del motor; y
d.) un módulo de control, conectado a la UMC, donde se
permita a los usuarios introducir un valor de velocidad del
motor a través del módulo de control, el cual es convertido en un tiempo de enganche de fase de la rotación del motor por la UMC, y siendo el tiempo de enganche de fase contado hacia atrás en el contador hasta el final, donde la UMC activa el motor para que gire desde la fase inicial hasta la siguiente fase.
7. Aparato para control de baja velocidad de motores de reluctancia según la reivindicación 6, en el que la conversión de una velocidad del motor al tiempo de enganche de fas e correspondiente es calculada por un programa incorporado de la UMC.
8. Aparato para control de baja velocidad de motores de reluctancia según la reivindicación 6, en el que el motor esun motor de reluctancia con un estator y un rotor.
9. Aparato para control de baja velocidad de motores de reluctancia según la reivindicación 8, en el que el número de interruptores cíclicos ópticos para la configuración es dos, situados en un lado del motor, para la lectura de posición del rotor.
10. Aparato para control de baja velocidad de motores de reluctancia según la reivindicación 8, en el que la UMC además comprende un circuito de control, y controlando la UMC el motor para alterar la fase del rotor por medio del circuito de control.
11. Aparato para control de baja velocidad de motores de reluctancia según la reivindicación 9, en el que dos interruptores cíclicos ópticos están configurados para que tengan un ángulo incluido entre ellos.
12. Aparato para control de baja velocidad de motores de reluctancia según la reivindicación 8, en el que la fase es la ubicación del rotor en relación con el estator.
13. Un aparato para control de baja velocidad de motores de reluctancia según la reivindicación 6, en el que un tiempo de
enganche de fase particular corresponde a una velocidad del motor específica, siendo controlada una velocidad del motor para que sea 40 rpm, y siendo el tiempo de enganche de fase correspondiente 62, 5 ms; siendo incrementada la velocidad del motor a 50 rpm, y siendo reducido el tiempo de enganche de fase correspondiente a 50 ms; siendo incrementada nuevamente la velocidad del motor a 100 rpm, y siendo reducido asimismo el tiempo de enganche de fase correspondiente a 25 ms; siendo incrementada otra vez la velocidad del motor a 200 rpm, y siendo reducido de ese modo el tiempo de enganche de fase correspondiente a 12, 5 ms.
Patentes similares o relacionadas:
MÁQUINA DE RELUCTANCIA CONMUTADA, del 24 de Octubre de 2019, de CENTRO DE INVESTIGACIONES ENERGÉTICAS, MEDIOAMBIENTALES Y TECNOLÓGICAS, O.A., M.P: Máquina de reluctancia conmutada. Siguiendo la configuración propuesta para el circuito magnético de la máquina de la presente invención, se reduce la cantidad de hierro […]
Método para sincronizar una máquina eléctrica de reluctancia síncrona, del 20 de Marzo de 2019, de KSB SE & Co. KGaA: Un método para sincronizar una máquina eléctrica de reluctancia síncrona en el que dicha máquina (E) no tiene sensores de tensión de magnetización […]
Conjunto aspirador con entrada a través de depósito extraíble, del 28 de Marzo de 2018, de SHOP VAC CORPORATION: Un conjunto aspirador que tiene: un conjunto de motor/ventilador que tiene un motor y un impulsor de aire ; una manguera […]
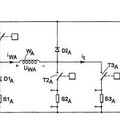 Controlador para máquinas eléctricas, del 1 de Febrero de 2013, de CG Drives & Automation Sweden AB: Un circuito de control para una máquina de reluctancia que tiene dos partes mutuamente amovibles, y al menosun devanado inductivo de fase (WA, WB, WC), cuya inductancia […]
Controlador para máquinas eléctricas, del 1 de Febrero de 2013, de CG Drives & Automation Sweden AB: Un circuito de control para una máquina de reluctancia que tiene dos partes mutuamente amovibles, y al menosun devanado inductivo de fase (WA, WB, WC), cuya inductancia […]
 Estimación de posición de rotor basada en resonancia, del 25 de Julio de 2012, de INVERTO NV: Sistema de prueba para una máquina de polos salientes , estando adaptado el sistema deprueba para generar una orden de pulso de prueba para aplicar un pulso […]
Estimación de posición de rotor basada en resonancia, del 25 de Julio de 2012, de INVERTO NV: Sistema de prueba para una máquina de polos salientes , estando adaptado el sistema deprueba para generar una orden de pulso de prueba para aplicar un pulso […]
CONVERTIDOR DE FRECUENCIA PARA UN MEDIDOR DE RELUCTANCIA CONECTADO Y SISTEMA MECATRÓNICO, del 5 de Diciembre de 2011, de MIELE & CIE. KG: Convertidor de frecuencia, que comprende un rectificador (B1) para generar o transformar una tensión alterna en el lado de la red (UN) en una tensión […]
PROCEDIMIENTO PARA REGULAR UN MOTOR DE RELUCTANCIA, del 20 de Junio de 2011, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento para regular un motor de reluctancia con un rotor y un estator , en donde el estator presenta bobinas de estator individuales y, según […]
 PROCEDIMIENTO DE MANDO DE UN CONJUNTO DE ARRANQUE DE UN VEHÍCULO DE MOTOR TÉRMICO, del 10 de Marzo de 2011, de RENAULT SAS: Procedimiento de mando de un conjunto de arrastre de vehículo en el cual se aplica a una máquina de reluctancia variable una consigna (θptabla) de ángulo de conducción […]
PROCEDIMIENTO DE MANDO DE UN CONJUNTO DE ARRANQUE DE UN VEHÍCULO DE MOTOR TÉRMICO, del 10 de Marzo de 2011, de RENAULT SAS: Procedimiento de mando de un conjunto de arrastre de vehículo en el cual se aplica a una máquina de reluctancia variable una consigna (θptabla) de ángulo de conducción […]