Procedimiento y aparato para cargar bobinas de fibra en una fileta de una máquina de colocación de fibras.
Una máquina de colocación de fibras
caracterizada por un aparato para cargar bobinas en una fileta (22) de la máquina de colocación de fibras (10) quees utilizado para cargar un molde (15),
teniendo la fileta (22) un número de bobinas dispuestas en un patrón,comprendiendo el aparato:
- un cargador de fileta (30);
- un depósito de bobina (44) transportado por el cargador de fileta (30); y,
- al menos un mandril (70) en el depósito de bobina (44) para recibir bobinas (40) llenas y para transferir lasbobinas (40) llenas a la fileta (22) de la máquina de colocación de fibras (10).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12156787.
Solicitante: MAG IAS LLC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 6015 Center Drive Sterling Heights, MI 48312-2667 ESTADOS UNIDOS DE AMERICA.
Inventor/es: VANIGLIA, MILO M., GRIMSHAW,MICHAEL N, DETTMANN,DENNY, KAPPESSER,RANDALL A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B29C31/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B29 TRABAJO DE LAS MATERIAS PLASTICAS; TRABAJO DE SUSTANCIAS EN ESTADO PLASTICO EN GENERAL. › B29C CONFORMACIÓN O UNIÓN DE MATERIAS PLÁSTICAS; CONFORMACIÓN DE MATERIALES EN ESTADO PLÁSTICO, NO PREVISTA EN OTRO LUGAR; POSTRATAMIENTO DE PRODUCTOS CONFORMADOS, p. ej. REPARACIÓN (fabricación de preformas B29B 11/00; fabricación de productos estratificados combinando capas previamente no unidas para convertirse en un producto cuyas capas permanecerán unidas B32B 37/00 - B32B 41/00). › Manipulación, p. ej. alimentación del material a conformar.
- B29C70/38 B29C […] › B29C 70/00 Conformación de materiales compuestos, es decir, materiales plásticos con refuerzos, cargas o partes preformadas, p. ej. inserciones. › Apilado (lay-up) automático, es decir, utilizando robots, aplicando filamentos según modelos predeterminados.
PDF original: ES-2426960_T3.pdf
Fragmento de la descripción:
Procedimiento y aparato para cargar bobinas de fibra en una fileta de una máquina de colocación de fibras El dispositivo se refiere a un procedimiento y a un aparato para cargar bobinas de fibra en una fileta de una máquina de colocación de fibras.
Las máquinas de colocación de fibra para fabricar grandes estructuras de materiales compuestos son conocidas en la técnica, por ejemplo, el documento EP 1 757 432 A2. Durante la operación de moldeo, el material se suministra desde una fileta y se coloca por el cabezal de colocación de fibras en un molde. Cuando las bobinas de material en la fileta se agotan, los núcleos vacíos tienen que ser retirados de la fileta y sustituirse con bobinas llenas. Una fileta típica puede comprender treinta y dos o más bobinas y la sustitución de las bobinas vacías por bobinas llenas es un proceso que consume tiempo. Sería deseable mecanizar el proceso de reposición de bobinas para las filetas de una máquina de colocación de fibras para aumentar la eficiencia de la máquina. Una máquina de colocación de fibras y un procedimiento para cargar bobinas en una máquina de este tipo se definen en las reivindicaciones 1 y 9, respectivamente.
Se utiliza un robot para cargar un depósito de bobina en un cargador de la fileta, mientras que una máquina de colocación de fibras está cargando un molde. Cuando las bobinas en la fileta de la máquina necesitan reponerse, el cargador de la fileta acerca la fileta de la máquina y el depósito de bobina se mueve en proximidad a la fileta. El depósito de bobina retira los núcleos de bobina vacíos de la fileta de la máquina de colocación de fibras y sustituye los núcleos con bobinas llenas del depósito de bobina del cargador de la fileta.
La Figura 1 muestra una máquina de colocación de fibras tipo pórtico situada en un extremo de un molde de colocación de fibras.
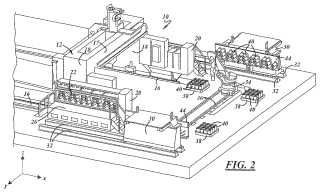
La Figura 2 muestra un robot y un par de filetas en una posición de carga del robot en el extremo de un molde de colocación de fibras.
La Figura 3 muestra los cargadores de fileta movidos a una posición de acoplamiento de la fileta que es opuesta a las filetas de la máquina de colocación de fibras.
La Figura 4 muestra los depósitos de bobina de los cargadores de fileta movidos a una posición de transferencia de la bobina en la que las bobinas de fibra se pueden transferir de los depósitos a las filetas.
La Figura 5 es una vista frontal de un depósito de bobina.
La Figura 6 es una vista en perspectiva de uno de los mecanismos de torreta mostrados en el depósito de bobina de la Figura 5.
La Figura 7 es una vista superior que muestra un mecanismo de torreta situado opuesto a un mandril en la fileta.
La Figura 8 es una vista desde arriba que muestra la pinza del núcleo del mecanismo de torreta que se ha hecho avanzar para sujetar un núcleo de la fileta.
La Figura 9 es una vista superior que muestra la pinza del núcleo del mecanismo de torreta retirando un núcleo de la fileta.
La Figura 10 es una vista superior del mecanismo de torreta girado 180 grados para situar una bobina llena frente al mandril vacío en la fileta.
La Figura 11 es una vista desde arriba que muestra una bobina llena cargada en el mandril vacío en la fileta.
La Figura 12 muestra los cargadores de la fileta movidos de nuevo a la posición de carga del robot.
La figura 1 muestra un extremo de una máquina de colocación de fibras 10 tipo pórtico. La máquina 10 comprende un pórtico móvil 12 que soporta un cabezal de colocación de fibra 14 que se utiliza para aplicar el material compuesto a un molde 15 que está situado en frente del pórtico 12. Las expresiones fibra y cabezal de colocación de fibras se utilizan aquí genéricamente para significar fibra seca o fibra preimpregnada con resina o cinta ranurada,
o cabezales que se utilizan para colocar tales fibras en un molde o herramienta durante un proceso de moldeo del material compuesto. El pórtico 12 se monta sobre carriles 16 que se extienden en la dirección del eje X, de manera que a medida que los materiales compuestos de fibra se colocan en el molde, la máquina 10 tipo pórtico se puede mover a lo largo de la longitud del molde 15 para aplicar el material compuesto en la toda superficie del molde. La viga horizontal 17 de la máquina 10 tipo pórtico se soporta por dos porciones erguidas verticales 18. El cabezal de colocación de fibra 14 se soporta de forma móvil por la viga horizontal 17 y se puede mover hacia atrás y adelante en la dirección del eje Y entre las dos porciones erguidas verticales 18 del pórtico y también hacia arriba y hacia abajo verticalmente en la dirección del eje Z para adaptarse a las diferentes alturas de molde. La operación de la
máquina de colocación de fibras se controla por un controlador 20.
Una fileta 22 para soportar una pluralidad de bobinas 24 de material de fibra se coloca al lado de la porción erguida vertical 18 de la máquina tipo pórtico. Aunque algunas de las Figuras de los dibujos muestran que la máquina de colocación de fibras se suministra con fibra a partir de dos filetas, la siguiente descripción se proporciona en términos de una fileta. La fileta 22 tiene una serie de bobinas 24 de fibra que se alimentan al cabezal de colocación de fibra 14 a través de un mecanismo de suministro de fibras, como se conoce bien en la técnica. La fileta 22 se fija a la porción erguida vertical 18 del pórtico 12 y se desplaza con el pórtico a medida que la máquina se desplaza sobre los carriles 16 a lo largo de la longitud del molde 15. Una plataforma de operario 26 se posiciona al lado de la fileta 22. La plataforma de operario 26 permite que un operario tome una posición al lado de las bobinas 24 para alimentar inicialmente el extremo de la fibra desde las bobinas recién cargadas en el mecanismo de suministro de fibras. A la plataforma de operario 26 se llega desde la planta de producción 27 por medio de escaleras 28 situadas en cada extremo. Un cargador de fileta 30 se monta sobre los carriles 32 detrás de la plataforma de operario 26. Los carriles 32 se extienden desde una posición que está al lado de la fileta 22 hasta una posición que está al lado de un robot 34.
La Figura 2 muestra la parte trasera de la máquina de colocación de fibras 10 y un par de cargadores de fileta 30 situados a cada lado de la máquina en una posición de carga del robot. Cada cargador de fileta 30 se monta sobre carriles 32 de modo que puede moverse desde la posición mostrada a una posición de acoplamiento de la fileta que está al lado de la plataforma de operario 26 y de la fileta 22. Un robot 34 se coloca entre los dos cargadores de fileta 30. El robot 34 se monta sobre los carriles 36 u otro mecanismo de guía y es capaz de viajar de ida y vuelta entre los dos cargadores de fileta 30. Palés 38 de bobinas 40 llenas de material de fibra se sitúan en cualquiera de los extremos de los carriles 36 de robot en relativa proximidad a los cargadores de fileta 30. Cada cargador de fileta 30 incluye un depósito de bobina 44 que es capaz de mantener una pluralidad de bobinas de material de fibra. El robot 34 es capaz de recoger boninas 40 llenas de un palé 38 y colocarlas sobre mandriles vacíos en los depósitos de bobina 44.
La Figura 3 muestra cada cargador de fileta 30 movido a lo largo del eje X en una posición de acoplamiento a la fileta que está opuesta a la fileta 22. El depósito de bobina 44 en el cargador de fileta 30 es capaz de transferir bobinas 40 llenas a la fileta 22 cuando el cargador de fileta 30 está en la posición de transferencia de bobinas como se describe a continuación. El número de bobinas 40 llenas que se pueden transportar por el depósito de bobina 44 puede ser igual al número de bobinas que se pueden cargar en la fileta 22.
La Figura 4 muestra el depósito de bobina 44 del cargador de fileta 30 movido en la dirección del eje Y a través de la plataforma de operario 26 y hacia la fileta 22 hasta una posición de transferencia de bobinas. En la posición de transferencia de bobinas, las bobinas vacías o núcleos 46 en la fileta 22 se pueden transferir al depósito de bobina 44 y las bobinas 40 llenas en los depósitos de bobina se pueden cargar en las filetas. Este movimiento del depósito de bobina 44 hacia la fileta 22 es perpendicular al movimiento del cargador de fileta 30 cuando se mueve desde la posición de carga del robot junto a el robot 34 hasta la posición de acoplamiento de la fileta que se muestra en la Figura 3. Después que las bobinas vacías o núcleos 46 en la fileta se han transferido al depósito de bobina 44 y las bobinas 40 llenas en el depósito de bobina se han cargado en las filetas 22, el depósito de bobina 44 se mueve a lo largo del eje Y lejos... [Seguir leyendo]
Reivindicaciones:
1. Una máquina de colocación de fibras caracterizada por un aparato para cargar bobinas en una fileta (22) de la máquina de colocación de fibras (10) que es utilizado para cargar un molde (15) , teniendo la fileta (22) un número de bobinas dispuestas en un patrón, comprendiendo el aparato:
- un cargador de fileta (30) ;
- un depósito de bobina (44) transportado por el cargador de fileta (30) ; y,
- al menos un mandril (70) en el depósito de bobina (44) para recibir bobinas (40) llenas y para transferir las bobinas (40) llenas a la fileta (22) de la máquina de colocación de fibras (10) .
2. La máquina de colocación de fibras de la reivindicación 1, comprendiendo además el aparato:
una posición de carga de un robot y una posición de transferencia de bobinas para el cargador de fileta (30) , por lo que el depósito de bobina (44) puede cargarse con bobinas (40) , mientras que la máquina de colocación de fibras (10) está cargando un molde (15) .
3. La máquina de colocación de fibras de la reivindicación 2, comprendiendo además el aparato:
un robot (34) para cargar bobinas (40) en el cargador (44) , por lo que el robot (34) coloca bobinas (40) llenas en el cargador (44) , con el cargador (44) en la posición de carga del robot y las bobinas (40) llenas son transferidas a la fileta (22) con el cargador de fileta (30) en la posición de transferencia de bobinas.
4. La máquina de colocación de fibras de la reivindicación 3, comprendiendo además el aparato:
- dos filetas (22) para la máquina de colocación de fibras (10) y dos cargadores de fileta (30) ; y,
- un depósito de bobina (44) en cada cargador de fileta (30) , en el que el robot (34) se puede mover entre los dos cargadores de fileta (30) para cargar bobinas (40) llenas en los dos depósitos de bobina (44) de los dos cargadores de fileta (30) .
5. La máquina de colocación de fibras de al menos una de las reivindicaciones 1 a 4, comprendiendo además el aparato:
al menos dos mandriles (68, 70) en el depósito de bobina (44) , un mandril separador (68) y un mandril cargador (70) , por lo que el mandril separador (68) es utilizado para retirar un núcleo de bobina (82) vacío de la fileta (22) y el mandril cargador (80) es utilizado para cargar una bobina (40) llena en la fileta (22) .
6. La máquina de colocación de fibras de la reivindicación 5, comprendiendo además el aparato:
un mecanismo de torreta (50) para montar el mandril separador (68) y el mandril cargador (80) en el depósito de bobina (50) , alineando el mecanismo de torreta (50) primero el mandril separador (68) con un mandril seleccionado para retirar una bobina vacía de la fileta (22) y, alineando después el mandril cargador (80) con el mandril seleccionado para cargar una bobina (40) llena en la fileta (22) .
7. La máquina de colocación de fibras de la reivindicación 6, comprendiendo además el aparato:
un actuador giratorio (60) para el mecanismo de torreta (50) , alineando el actuador giratorio (60) primero el mandril separador (68) con un mandril (80) preseleccionado en la fileta (22) y después al mandril cargador (70) con el mismo mandril (80) preseleccionado en la fileta (22) .
8. La máquina de colocación de fibras de la reivindicación 6 o 7, comprendiendo además el aparato:
una pluralidad de mecanismos de torreta (50) en el depósito de bobina (44) , estando el mecanismo de torreta (50) dispuesto en un patrón que es el mismo que el patrón de bobinas en la fileta (22) , por lo que todas las bobinas en la fileta (22) pueden separarse de la fileta (22) al mismo tiempo.
9. Un procedimiento para cargar bobinas en una fileta (22) de una máquina de colocación de fibras (10) que es utilizado para cargar un molde (15) , comprendiendo el procedimiento:
- proporcionar una máquina de colocación de fibras (10) ;
- proporcionar un cargador de fileta (30) ;
-proporcionar un depósito de bobina (44) en el cargador de fileta (30) ;
- proporcionar al menos un mandril cargador (70) en el depósito de bobina (44) ;
- cargar bobinas (40) llenas en el mandril cargador (70) ; y,
- transferir las bobinas (40) llenas desde el mandril cargador (70) a la fileta (22) de la máquina de colocación de fibras (10) .
10. El procedimiento de la reivindicación 9 que comprende además:
- cargar bobinas (40) llenas del depósito de bobina (44) en una posición de carga del robot; y,
- transferir las bobinas (40) llenas desde el depósito de bobina (44) a la fileta (22) en una posición de transferencia de bobinas, por lo que el depósito de bobina (44) puede cargarse con bobinas (40) , mientras que la máquina de colocación de fibras (10) está cargando un molde (15) .
11. El procedimiento de la reivindicación 10 que comprende además:
- proporcionar un robot (34) para cargar bobinas (40) llenas en el cargador (44) ;
- colocar las bobinas (40) llenas en el depósito de bobina (44) con el depósito bobina (44) en la posición de carga del robot, y,
- transferir las bobinas (40) llenas desde el depósito de bobina (44) a la fileta (22) con el depósito de bobina
(44) en la posición de transferencia de bobinas.
12. El procedimiento de la reivindicación 11, que comprende además:
-proporcionar dos filetas (22) para la máquina de colocación de fibras (10) ;
- proporcionar dos cargadores de fileta (30) ;
- proporcionar un depósito de bobina (44) en cada cargador de fileta (30) , y,
- mover el robot (34) entre los dos cargadores de fileta (30) para cargar bobinas (40) llenas en los dos depósitos de bobina (44) .
13. El procedimiento de la reivindicación 11 o 12, que comprende además:
- proporcionar un mandril separador (68) en el depósito de bobina (44) ;
- proporcionar un dispositivo de agarre del núcleo (72) en el mandril separador (68) ; y
- retirar los núcleos (82) vacíos de la fileta (22) con el dispositivo de agarre del núcleo (72) .
14. El procedimiento de la reivindicación 13 que comprende además:
- proporcionar un mandril cargador (70) en el depósito de bobina (44) ;
- cargar las bobinas (40) llenas en el mandril cargador (70) ; y
- transferir las bobinas (40) llenas desde el mandril cargador (70) a la fileta (22) .
15. El procedimiento de la reivindicación 14 que comprende además:
- montar el mandril separador (68) y el mandril cargador (70) en un mecanismo de torreta (50) ;
- proporcionar un actuador giratorio (60) para el mecanismo de torreta (50) ;
- - alinear primero el mandril separador (68) con un mandril (80) preseleccionado en la fileta (22) ; y, -- girar después el mandril separador (68) y el mandril cargador (70) para alinear el mandril cargador (70) con el mismo mandril (80) preseleccionado en la fileta (22) .
Patentes similares o relacionadas:
MOLDE, MÁQUINA Y PROCEDIMIENTO PARA LA FABRICACIÓN DE ARTÍCULOS TRIDIMENSIONALES Y PLANTA DE FABRICACIÓN ASOCIADA A LA MISMA, del 2 de Abril de 2020, de SIMPLICITY WORKS EUROPE, S. L. (100.0%): Molde para la fabricación de artículos tridimensionales, que comprende un cuerpo ; una tapa configurada para cerrar dicho cuerpo ; y medios de cierre […]
Compactación de elementos de material compuesto sin curar sobre superficies de mandril contorneadas, del 15 de Enero de 2020, de THE BOEING COMPANY: Método de compactación de un elemento de material compuesto sin curar contra una superficie de mandril que tiene un contorno, que comprende: […]
Sistemas y procedimientos de suministro de elementos de fijación de ganchos en una línea de montaje de moldes, del 23 de Octubre de 2019, de YKK CORPORATION: Sistema apto para cortar y suministrar una pluralidad de bandas de cinta de fijación de ganchos a cada uno de entre una pluralidad de moldes que […]
Dispositivo para la manipulación de un molde, del 18 de Septiembre de 2019, de Rodrigues da Costa, José: Dispositivo para la manipulación de un molde, especialmente de inyección de pieza de plástico, que comprende: - Un órgano de unión , apto para ser unido a un […]
Cuna para una pala de turbina eólica, del 14 de Agosto de 2019, de LM WP Patent Holding A/S: Cuna para soportar al menos una sección de una pala de turbina eólica, comprendiendo la cuna al menos una matriz de elementos de soporte […]
Sistema y método para cargar perfiles para la unión de sus extremos, del 9 de Abril de 2019, de CQLT SaarGummi Technologies S.à.r.l: Sistema de carga de extremos de perfiles para su unión, el sistema comprendiendo: al menos un bastidor móvil comprendiendo una primera zona […]
Materiales poliméricos, del 10 de Enero de 2019, de COLORMATRIX HOLDINGS, INC: Un método para seleccionar y fabricar una formulación de color no volátil para fabricar, en un color seleccionado, una pieza que comprende un material polimérico, […]
Dispositivo para alinear elementos inidividuales, especialmente elementos de filtro durante el traslado de los mismos para un tratamiento posterior, del 10 de Enero de 2019, de HEKUMA GMBH: Dispositivo para alinear elementos individuales , en particular elementos de filtro, dispuestos en cavidades receptoras de un dispositivo de transferencia […]