PROCEDIMIENTO PARA AMPLIAR EL INTERVALO DE MEDICION DEL ANGULO ABSOLUTO EN SENSORES DE CAMPO MAGNETICO.
Procedimiento para ampliar el intervalo de medición del ángulo absoluto en sensores de campo magnético,
con empleo de un circuito de evaluación (12) con las siguientes etapas del procedimiento:
la adición de un desplazamiento C que puede ser determinado de antemano a una de las dos magnitudes de entrada (2, 3) que son generadas por los sensores de campo magnético, que dependen angularmente del período, que se presentan con desplazamiento de fases, y
la formación de la relación en forma de un cociente de una de las dos magnitudes de entrada (2, 3) entre la suma formada por la otra magnitud de entrada (2, 3), desplazada en fase, y el desplazamiento C,
con lo cual se posibilita una elongación (9) del intervalo de medición del ángulo absoluto de los sensores de campo magnético hasta una rotación completa, es decir hasta 360 grados
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE01/02596.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20,70442 STUTTGART.
Inventor/es: MEYER,MARCUS, THOELKE,HOLGER, KLIFFKEN,MARKUS,G.
Fecha de Publicación: .
Fecha Concesión Europea: 31 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G01D5/244C
Clasificación PCT:
- G01B7/30 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 7/00 Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos. › para la medida de ángulos o conicidades; para ensayar la alineación de ejes.
- G01D5/14 G01 […] › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en la magnitud de una corriente o voltaje.
Clasificación antigua:
Fragmento de la descripción:
Procedimiento para ampliar el intervalo de medición del ángulo absoluto en sensores de campo magnético.
Campo industrial
En los procedimientos actuales para la medición angular se hacen trabajar sensores de campo magnético en una disposición en forma de puente de medición. En el caso de los sensores de magnetorresistencia anisótropa AMR no es posible una medición del ángulo absoluto sobre un intervalo angular 360º sin un coste elevado. En el caso de los sensores de tipo Hall y respectivamente de magnetorresistencia gigante GMR es posible la ampliación del intervalo a 360º en el caso de los sensores de tipo AMR es posible en un intervalo de medición de 180º.
Estado de la técnica
En los sensores de campo magnético actuales, que contienen una conexión en puente (por ejemplo puente de Wheatstone), únicamente puede llevarse a cabo con dificultad, en todo caso, una medición del ángulo absoluto de 360º. Un elemento sensor proporciona una tensión, que corresponde a la relación (1):

Por consiguiente, en el caso de los sensores de tipo AMR es posible una medición del ángulo absoluto de hasta 180º inclusive sin conexión eléctrica adicional. Para llevar a cabo la medición del ángulo absoluto se requieren dos puentes completos que están dispuestos respectivamente a 45º entre sí. Uno de estos puentes completos proporciona una señal senoidal, el otro puente completo proporciona una señal cosenoidal de la trayectoria a ser medida de la tensión, cuya señal está desplazada 90º en fase.
Cuando se relacionan recíprocamente las tensiones de salida, puede ser determinada la función de Arctan del ángulo absoluto del desplazamiento en fase. Con esta finalidad sirve la relación siguiente:
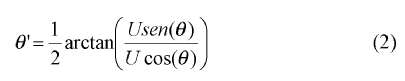
La relación de segundo grado, de conformidad con la ecuación (1), permite únicamente una función en forma de dientes de sierra con una cobertura de 180º.
Una resolución angular periódica de 180º proporciona valores ambiguos en el caso de una rotación completa (ángulo de 360 grados). Sin embargo, con frecuencia se requiere o se desea un intervalo de valores unívoco debido a consideraciones funcionales. Esto puede ser realizado, por ejemplo, por medio de bobinas magnéticas adicionales dentro o fuera del elemento sensor. Sin embargo, tales soluciones requieren sensores costosos y circuitos de evaluación complicados. Este gasto adicional de circuitería debe ser evitado y, por consiguiente, los costes relacionados con el mismo. Por otra parte, los sensores con bobinas magnéticas sólo pueden ser modificados con dificultad en los circuitos ya existentes.
Los documentos de las patentes DE 197,22,016, DE 195,39,134, DE 198,17,356, DE 198,18,799 y DE 44,40,214 describen ya un procedimiento de medición del ángulo, según el cual se determina un ángulo de fino mediante la evaluación de dos señales de sensores de campo magnético. La señal es ambigua en el intervalo del ángulo completo, sin embargo la ambigüedad puede ser compensada si se asigna a la señal fina un intervalo angular aproximado tal como, por ejemplo, un segmento circular, por medio de una determinación complementaria.
Exposición de la invención
Con la solución propuesta, de conformidad con la invención, puede conseguirse un cálculo del ángulo absoluto, que no representa elevadas exigencias con respecto al equipamiento físico. En los circuitos de evaluación, ya existentes, que están equipados con un transductor analógico/digital A/D, pueden llevarse a cabo modificaciones en el circuito para llevar a cabo el procedimiento de conformidad con la invención, simplemente con un bajo gasto para el reequipamiento. El procedimiento de evaluación puede ser adaptado, sin problemas y de manera sencilla, a otros sensores por medio de los grados de libertad en el momento de llevar a cabo el proyecto de los factores normalizados Asen, Acos. Los valores de desplazamiento Ksen y Kcos pueden ser aportados, por ejemplo, a la hora de la construcción del sistema de evaluación en el ámbito de la programación al final de la cadena de montaje.
Con la solución propuesta, de conformidad con la invención, puede llevarse a cabo el cálculo de los valores de desplazamiento Ksen y respectivamente Kcos tanto en la parte analógica así como, también, en la parte digital de un circuito de evaluación.
Con el procedimiento propuesto, de conformidad con la invención, es posible una elongación de la función de Arctan desde 180º hasta 360º y, por consiguiente, es posible una ampliación del intervalo de valores. Cuando se detectan las transiciones de los flancos de 360º, es posible con el procedimiento de conformidad con la invención también una medición incremental o una detección del ángulo absoluto de aquellos ángulos absolutos que sean mayores que 360º. Así mismo en el caso de esta variante de realización de la solución, propuesta de conformidad con la invención, pueden suprimirse bobinas magnéticas adicionales, que están integradas en el elemento sensor. De este modo, puede implementarse la variante de realización incluso en los circuitos de evaluación ya suministrados o bien que se encuentren ya en funcionamiento sin un gran gasto de reequipamiento. Con el procedimiento propuesto, de conformidad con la invención, para aumentar el intervalo de medición del ángulo absoluto pueden medirse de manera muy exacta ángulos absolutos dentro de una rotación completa de 360º, siendo posible sin problemas con el procedimiento propuesto, de conformidad con la invención, un aumento del intervalo de medición en un múltiplo de una rotación de 360º.
Dibujo
La invención se explica a continuación con mayor detalle por medio del dibujo.
Se muestra:
en la figura 1 la trayectoria de las señales de entrada desplazadas en fase en forma de una parte senoidal y de una parte cosenoidal de una tensión de entrada, que están recíprocamente desplazadas en fase a 90º y la trayectoria en forma de dientes de sierra del ángulo absoluto dividida en dos segmentos en forma de diente de sierra de 180º cada uno,
en la figura 2 las trayectorias de la tensión de la parte de la tensión senoidal y respectivamente de la parte de la tensión cosenoidal y su representación en una rotación completa de 360º del ángulo absoluto,
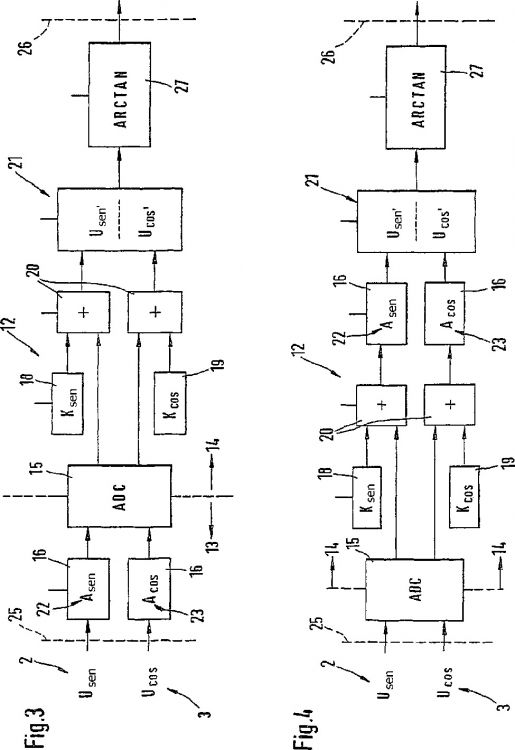
en la figura 3 un circuito de evaluación, en el que se lleva a cabo la normalización de las amplitudes de las señales de entrada en la parte analógica y
en la figura 4 un circuito de evaluación de conformidad con la figura 3, con factores de normalización así como los valores de desplazamiento en la parte digital del circuito de evaluación.
Variantes de realización
Como consecuencia de la relación de segundo orden de conformidad con la ecuación 1 se ajusta en las trayectorias de la tensión de conformidad con la figura 1, que han sido designadas con el número de referencia 1, la trayectoria de la tensión que ha sido representada en la misma. La trayectoria de la tensión debe ser subdividida en una parte senoidal 2 así como en una parte cosenoidal 3, que están recíprocamente desplazadas en fase a 90º, como se ha indicado ya precedentemente. Con el número de referencia 6 se ha designado el desplazamiento del circuito en puente de Upuente = Ualimentación/2. Si se relacionan recíprocamente la parte senoidal 2 así como la parte cosenoidal 3 de la tensión, podrá determinarse el ángulo absoluto a través de la función arctan de conformidad con la otra ecuación 2 que ha sido representada más arriba. La función en forma de dientes de sierra de conformidad con la figura 1 se ha caracterizado con mayor detalle por medio de un primer diente de sierra a 180º por medio del número de referencia 7 así como por medio de un segundo diente de sierra a 180 caracterizado con el número de referencia 8. Los dientes de sierra, que son conocidos en esta solución por el estado de la técnica, se extienden únicamente a través de un intervalo de medición comprendido entre 0 y 180º o bien desde 180º hasta 360º. Cuando se lleva a cabo una elaboración ulterior de las señales del ángulo absoluto, obtenidas de este modo, se presentan asignaciones ambiguas para diversos ángulos absolutos ?' por cada diente de sierra 7 y respectivamente 8. Con...
Reivindicaciones:
1. Procedimiento para ampliar el intervalo de medición del ángulo absoluto en sensores de campo magnético, con empleo de un circuito de evaluación (12) con las siguientes etapas del procedimiento:
con lo cual se posibilita una elongación (9) del intervalo de medición del ángulo absoluto de los sensores de campo magnético hasta una rotación completa, es decir hasta 360 grados.
2. Procedimiento según la reivindicación 1, caracterizado porque el circuito de evaluación (12) contiene una parte analógica (13) y una parte digital (14).
3. Procedimiento según la reivindicación 2, caracterizado porque puede llevarse a cabo una normalización de la amplitud (16) de las magnitudes (2, 3) desplazadas en fase tanto en la parte analógica (13) así como, también, en la parte digital (14) del circuito de evaluación.
4. Procedimiento según la reivindicación 2, caracterizado porque los factores de normalización (22, 23) Asen, Acos son determinados bien en la parte analógica (13) o bien en la parte digital (14) del circuito de evaluación (12).
5. Procedimiento según la reivindicación 1, caracterizado porque se determinan valores de desplazamiento (18, 19) para las respectivas magnitudes de entrada, que se presentan respectivamente como señal senoidal o como señal cosenoidal (2, 3), a partir de los valores máximos y de los valores mínimos de las magnitudes de entrada (2, 3) desplazadas en fase.
6. Procedimiento según la reivindicación 5, caracterizado porque el desplazamiento C se determina a partir de las magnitudes de entrada (2, 3).
7. Procedimiento según la reivindicación 6, caracterizado porque pueden ser determinados tanto un desplazamiento Ksen (22) y un desplazamiento Kcos (23) a partir de los valores máximos y respectivamente de los valores mínimos de las magnitudes de entrada (2, 3).
8. Procedimiento según la reivindicación 7, caracterizado porque los valores de desplazamiento obtenidos Ksen (22) o Kcos (23) deben ser adicionados a las magnitudes de entrada (2) o (3) como paso previo al determinación del ángulo absoluto.
9. Procedimiento según la reivindicación 8, caracterizado porque se obtiene en el lado de salida (26) del circuito de evaluación (12) una señal de salida estable cuando el desplazamiento Kcos (19) corresponda al desplazamiento C y cuando el Ksen (18) sea igual a 0.
10. Procedimiento según la reivindicación 8, caracterizado porque se obtiene en el lado de salida (26) del circuito de evaluación (12) una señal de salida estable cuando el desplazamiento Ksen corresponda al desplazamiento C y cuando el desplazamiento Kcos (19) = 0.
Patentes similares o relacionadas:
 Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
SISTEMA SENSOR DE POSICION, del 22 de Enero de 2020, de PIHER SENSORS & CONTROLS, S.A: 1. Sistema sensor de posición de tipo inductivo para motores, comprendiendo el sistema sensor un sensor que comprende una bobina inductora y una bobina pasiva, […]
Aparato de detección de la posición del polo magnético para máquinas síncronas, del 3 de Abril de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un aparato de detección de la posición del polo magnético para máquinas síncronas, que comprende: - un medio de circuito , para convertir […]
Dispositivo de detección de ángulo de rotación absoluto de múltiples vueltas y método para la detección de ángulo de rotación absoluto, del 31 de Mayo de 2017, de Oriental Motor Co., Ltd: Un aparato de detección de ángulo de rotación de múltiples vueltas que comprende: un engranaje de árbol motor (10b) montado sobre un árbol motor (10a); un primer […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple y método para detectar su ángulo de rotación, del 8 de Marzo de 2017, de Oriental Motor Co., Ltd: Un dispositivo de detección de ángulo de rotación para detectar un ángulo de rotación absoluto de un primer árbol giratorio , que comprende: […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple, y método para detectar los mismos, del 19 de Octubre de 2016, de Oriental Motor Co., Ltd: Un dispositivo para calcular un ángulo de rotación absoluto de rotación múltiple, que comprende: un mecanismo de transmisión adaptado para transmitir una revolución […]
Dispositivo para detectar el ángulo de rotación de un eje de dirección, del 10 de Agosto de 2016, de KAYABA INDUSTRY CO., LTD.: Dispositivo de deteccion del angulo de rotacion del eje de direccion que detecta un angulo de rotacion de un eje de direccion que gira al accionar […]
 Captador de posición absoluto y multi-periódico, del 1 de Febrero de 2016, de Moving Magnet Technologies (MMT): Captador magnético de posición (A), que incluye al menos una unidad imantada , una primera sonda magnetosensible y una segunda sonda […]
Captador de posición absoluto y multi-periódico, del 1 de Febrero de 2016, de Moving Magnet Technologies (MMT): Captador magnético de posición (A), que incluye al menos una unidad imantada , una primera sonda magnetosensible y una segunda sonda […]