PLATAFORMA ROBOTIZADA CON MÚLTIPLES APLICACIONES PARA NEUROCIRUGÍA Y PROCEDIMIENTO DE REAJUSTE.
Plataforma robotizada con múltiples aplicaciones para neurocirugía caracterizada porque comprende:
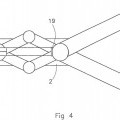
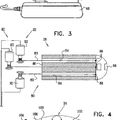
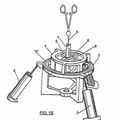
- una consola de planificación (1) que integra medios de tratamiento (2) capaces, particularmente, de recibir y tratar imágenes digitales, -un brazo robot posicionador (3) que comprende varios segmentos de brazo de los cuales uno es terminal y proximal y el otro terminal y distal, estando dichos segmentos unidos unos a otros por articulaciones y comprendiendo el segmento distal terminal del brazo un órgano receptor (5) dispuesto para recibir herramientas (4), estando dicho brazo robot (3) controlado por la consola de planificación (1), -al menos un medio (14) de captura de imágenes de video adecuado para capturar imágenes de la zona anatómica a tratar, pudiendo estar dicho medio (14) conectado eléctricamente a los medios de tratamiento (2) que comprende la consola de planificación (1), y siendo dicho medio de captura adecuado para posicionarse y fijarse de manera amovible al órgano receptor (5) del segmento distal terminal del brazo, comprendiendo dicho medio de captura de imágenes un eje óptico central (AA') e integrando un módulo láser central (144) alineado en el eje óptico central (AA'), siendo dicho módulo láser central (144) un telémetro láser adecuado para medir la distancia entre su cara externa y el objeto más cercano apuntado por el haz láser,-herramientas (4), instrumentos y otros adaptados para posicionarse y fijarse de manera amovible al órgano receptor del segmento distal terminal del brazo, -medios de visualización (6) de imágenes preoperatorias y peroperatorias, estando dichos medios conectados eléctricamente a la consola de planificación (1) para recibir, de esta última, señales de video relacionadas con las imágenes a visualizar, y/o con el medio (14) de captura de imágenes
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2008/000860.
Solicitante: MEDTECH S.A.
Nacionalidad solicitante: Francia.
Dirección: PARC EUROMÉDECINE - BÂT. 8 1006 RUE DE LA CROIX VERTE 34090 MONTPELLIER FRANCIA.
Inventor/es: NAHUM,BERTIN, BLONDEL,LUCIEN.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Junio de 2008.
Clasificación Internacional de Patentes:
- A61B19/00M
- A61B19/00M2
Clasificación PCT:
- A61B19/00
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2361717_T3.pdf
Fragmento de la descripción:
Campo técnico
La presente invención pertenece al campo de los materiales utilizados en medicina y, más específicamente, en neurocirugía. Esta invención se refiere, más particularmente, a una plataforma robotizada con múltiples aplicaciones para neurocirugía y al procedimiento de empleo asociado.
Estado de la técnica anterior.
Se sabe que la práctica de la neurocirugía requiere la utilización de un número creciente de equipos y de materiales quirúrgicos dedicados.
De este modo, se utilizan marcos estereotáxicos particularmente para biopsias tumorales o el posicionamiento preciso de electrodos de estimulación. Un inconveniente de estos marcos es que no se prestan o se prestan muy poco a la cirugía abierta. Además de su volumen, otro inconveniente reside esencialmente en que requieren un anclaje firme en los huesos de la caja craneana.
También se conocen robots que pueden utilizarse en sustitución de los marcos estereotáxicos.
También se conocen del estado de la técnica sistemas de neuronavegación que ofrecen una solución pertinente para la cirugía abierta. Estos sistemas permiten la detección de estructuras anatómicas a partir de formación de imágenes preoperatorias dada por un tomodensitómetro, por un aparato de formación de imágenes por resonancia magnética (IRM) u otro y de un sistema de localización en tres dimensiones, que comprende por ejemplo varias fuentes luminosas unidas al instrumento, que emiten en el ámbito del infrarrojo.
Estos sistemas comprenden además una o más cámaras adecuadas para percibir el infrarrojo y para emitir una señal la cual será tratada por un ordenador apropiado para calcular los datos de posiciones y orientaciones espaciales del instrumento quirúrgico, tales como la posición de la punta de este último.
Típica y previamente a la realización de la formación de imágenes, el cráneo del paciente está equipado con marcadores radiopacos en forma de pastillas, previstas para aplicarlas directamente en la piel. Las imágenes digitales obtenidas son transferidas a un bloque de memoria del ordenador. Con ayuda del instrumento quirúrgico o de un instrumento específico, el cirujano pone a la punta de este instrumento en contacto con cada uno de los marcadores radiopacos. De este modo, la posición del instrumento puede marcarse con respecto a las imágenes médicas digitalizadas obtenidas anteriormente. De esta manera, durante la intervención quirúrgica particularmente, la imagen del instrumento y su posición pueden superponerse a las imágenes digitales en vista de una visualización conjunta en una pantalla de visualización.
Los sistemas de neuronavegación se utilizan particularmente para la detección y la resección de tumores cerebrales.
También se conocen microscopios quirúrgicos utilizados como herramientas de visualización durante actos neuroquirúrgicos a cielo abierto (por ejemplo: corticectomía).
Las aplicaciones quirúrgicas descritas anteriormente y los equipos asociados representan una parte importante de la práctica rutinaria en neurocirugía.
Sin embargo, la pluralidad de los equipos y su especificidad para un tipo de aplicación neuroquirúrgica son desventajosos en la gestión logística hospitalaria, y contradictorios con los objetivos de flexibilidad y de polivalencia del quirófano.
Otro inconveniente específico de la neuronavegación reside en las posibilidades de errores de reajuste entre el modelo digital establecido, el paciente y la herramienta. Esto se debe esencialmente a que las pastillas radiopacas se aplican sobre la piel, que sigue siendo un órgano móvil, y no se implantan de manera fija en los huesos craneales.
Para la colocación de estos marcadores radiopacos, el cirujano busca, sin embargo, evitar cualquier procedimiento invasivo a pesar del riesgo de pérdida de precisión del reajuste debido al desplazamiento involuntario de uno de los marcadores.
También se conoce del estado de la técnica un dispositivo robotizado de guía para herramienta quirúrgica. Dicha herramienta se describe particularmente en la solicitud de patente FR 2 871 363. Este dispositivo robotizado comprende un brazo robot, medios de recogida de marcas anatómicas con ayuda del brazo robot, medios de tratamiento de estas marcas anatómicas y medios de posicionamiento automático de un instrumento de guía de una
herramienta quirúrgica, siendo portado este instrumento de guía por el brazo robot.
Este dispositivo de guía no está dotado de medios de captura de imágenes del campo operatorio ni de medios específicos de visualización del campo operatorio. Este dispositivo no responde al objetivo que persigue la presente invención.
Exposición de la invención.
La presente invención pretende resolver los problemas mencionados anteriormente proponiendo por un lado una solución con múltiples aplicaciones que sustituye al conjunto de los dispositivos enumerados anteriormente y un procedimiento que pretende un mejor reajuste del modelo digital de la zona anatómica a tratar con el paciente y la herramienta quirúrgica.
A tal efecto, la invención tal como se define en la reivindicación 1 propone una plataforma robotizada con múltiples aplicaciones para neurocirugía caracterizada esencialmente por que comprende:
- una consola de planificación que integra medios de tratamiento capaces, particularmente, de recibir y tratar imágenes digitales, - un brazo robot posicionador que comprende varios segmentos de brazo de los cuales uno es terminal y proximal y el otro terminal y distal, estando dichos segmentos unidos unos a otros por articulaciones y comprendiendo el segmento distal terminal del brazo un órgano receptor dispuesto para recibir herramientas, instrumentos y otros, estando dicho brazo robot controlado por la consola de planificación, - al menos un medio de captura de imágenes de video adecuado para capturar imágenes de la zona anatómica a tratar, pudiendo estar dicho medio de captura conectado eléctricamente a los medios de tratamiento que comprende la consola de planificación, y siendo dicho medio de captura adecuado para posicionarse y fijarse de manera amovible al órgano receptor que comprende el segmento distal terminal del brazo, - herramientas, instrumentos y otros adaptados para posicionarse y fijarse de manera amovible al órgano receptor del segmento distal terminal del brazo, - medios de visualización de las imágenes preoperatorias y peroperatorias, estando dichos medios conectados eléctricamente a la consola de planificación para recibir de esta última señales de video relacionadas con las imágenes a visualizar, y/o con el medio de captura de imágenes.De acuerdo con otra característica de la invención, el brazo robot posicionador presenta al menos seis grados de libertad, es decir tres traslaciones y tres rotaciones, gracias a lo cual la herramienta o el instrumento y otro que porta puede posicionarse y orientarse en el espacio de todas las formas posibles.
De acuerdo con otra característica de la invención, el brazo robot comprende un sensor de fuerza y está adaptado para funcionar de acuerdo con un modo en el que un usuario tiene la capacidad de desplazar el brazo robot de forma manual sujetándolo por su parte terminal. El brazo robot funciona entonces en modo cooperativo.
De acuerdo con otra característica de la invención, la consola de planificación está equipada con una pantalla de control y con una interfaz de comunicación adaptada para recibir de un usuario parámetros de planificación operatoria.
Gracias a estas disposiciones, los medios de tratamiento pueden tener en cuenta los parámetros de planificación operatoria para controlar la trayectoria del robot posicionador y, más particularmente, la trayectoria de la herramienta
o del instrumento o del medio de captura de imágenes que porta.
De este modo, el punto de entrada craneal y el punto objetivo en la masa cervical, por ejemplo, pueden suministrarse a la plataforma gracias a una interfaz gráfica sencilla y fácil de usar.
La interfaz de comunicación puede, por ejemplo, asumir la forma de un teclado, de una interfaz táctil y/o de un dispositivo de punteo de tipo ratón.
De acuerdo con características particulares de la invención, los medios de tratamiento están adaptados para definir cada trayectoria gracias a cálculos tridimensionales realizados a partir de los parámetros de planificación... [Seguir leyendo]
Reivindicaciones:
1. Plataforma robotizada con múltiples aplicaciones para neurocirugía caracterizada porque comprende:
- una consola de planificación (1) que integra medios de tratamiento (2) capaces, particularmente, de recibir y tratar imágenes digitales, -un brazo robot posicionador (3) que comprende varios segmentos de brazo de los cuales uno es terminal y proximal y el otro terminal y distal, estando dichos segmentos unidos unos a otros por articulaciones y comprendiendo el segmento distal terminal del brazo un órgano receptor (5) dispuesto para recibir herramientas (4), estando dicho brazo robot (3) controlado por la consola de planificación (1), -al menos un medio (14) de captura de imágenes de video adecuado para capturar imágenes de la zona anatómica a tratar, pudiendo estar dicho medio (14) conectado eléctricamente a los medios de tratamiento (2) que comprende la consola de planificación (1), y siendo dicho medio de captura adecuado para posicionarse y fijarse de manera amovible al órgano receptor (5) del segmento distal terminal del brazo, comprendiendo dicho medio de captura de imágenes un eje óptico central (AA') e integrando un módulo láser central (144) alineado en el eje óptico central (AA'), siendo dicho módulo láser central (144) un telémetro láser adecuado para medir la distancia entre su cara externa y el objeto más cercano apuntado por el haz láser, -herramientas (4), instrumentos y otros adaptados para posicionarse y fijarse de manera amovible al órgano receptor del segmento distal terminal del brazo, -medios de visualización (6) de imágenes preoperatorias y peroperatorias, estando dichos medios conectados eléctricamente a la consola de planificación (1) para recibir, de esta última, señales de video relacionadas con las imágenes a visualizar, y/o con el medio (14) de captura de imágenes.
2. Plataforma de acuerdo con la reivindicación 1, caracterizada porque al robot posicionador (3) se le asocian una unidad central y una interfaz de entrada informática de datos (32).
3. Plataforma de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizada porque el brazo robot posicionador (3) presenta al menos seis grados de libertad, es decir tres traslaciones y tres rotaciones.
4. Plataforma de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizada porque el brazo robot
(3) comprende un sensor de fuerza y está adaptado para funcionar de acuerdo con un modo en el que un usuario tiene la capacidad de desplazar el brazo robot (3) de forma manual sujetándolo por su parte terminal.
5. Plataforma de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizada porque está equipada con una pantalla de control (60) y con una interfaz de comunicación (61) adaptada para recibir de un usuario parámetros de planificación operatoria.
6. Plataforma de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizada porque los medios de tratamiento (2) están adaptados para definir cada trayectoria gracias a cálculos tridimensionales realizados a partir de los parámetros de planificación operatoria y de las coordenadas espaciales de las marcas anatómicas.
7. Plataforma de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizada porque las herramientas (4) comprenden al menos una guía, y/o al menos un puntero mecánico y/o al menos un puntero láser y/o al menos una sonda ultrasónica y/o al menos un telémetro.
8. Plataforma de acuerdo con una cualquiera de las reivindicaciones 1 a 6, caracterizada porque las herramientas comprenden al menos un instrumento quirúrgico.
9. Plataforma de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizada porque el brazo robotizado posicionador (3) por su segmento proximal terminal está fijado a una torreta de orientación instalada de forma fija en la parte superior de una caja en forma de paralelepípedo (7) que comprende órganos para rodar en el suelo y medios de inmovilización con respecto a este último.
10. Plataforma de acuerdo con la reivindicación anterior, caracterizada porque la caja (7) está dotada de medios de fijación (9, 10, 11) a la mesa de operaciones, que impiden cualquier movimiento de la caja con respecto a dicha mesa.
11. Plataforma de acuerdo con la reivindicación 9, caracterizada porque la caja (7) comprende medios de fijación rígidos a una placa sujetacabezas (15) instalada sobre la cabeza (H) de un paciente portado por la mesa de operaciones (T).
12. Plataforma de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizada porque el medio (14) de captura de imágenes de video de la zona anatómica a tratar, comprende dos cámaras estereoscópicas (141) para adquirir dos imágenes de video estereoscópicas de la zona anatómica a tratar y que los medios de visualización (6) comprenden un sistema de visualización de imágenes estereoscópicas.
13. Plataforma de acuerdo con la reivindicación 12, caracterizada porque el medio de captura de imágenes (14) integra un módulo óptico (142) adaptado para establecer una interfaz con un cable óptico conectado a su vez a una fuente de luz fría (142a).
14. Plataforma de acuerdo con la reivindicación 12 o la reivindicación 13, caracterizada porque el medio de captura de imágenes (14) integra dos módulos láser (143) que proyectan haces láser visibles que convergen en un punto adecuado para ser ajustado para ser el punto de intersección de los dos ejes ópticos de las cámaras estereoscópicas (141).
15. Plataforma de acuerdo con una cualquiera de las reivindicaciones 12 a 14, caracterizada porque el medio de captura de imágenes (14) integra un sistema mecánico de orientación (145, 146, 147, 148) mediante rotación según su eje óptico AA'.
16. Plataforma de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizada porque en el o en al menos uno de los medios de visualización se muestran imágenes de video de la zona anatómica a tratar aumentada con elementos virtuales para asegurar una función de realidad aumentada.
17. Procedimiento de reajuste de la zona anatómica a tratar con respecto a su modelo digital y un brazo robotizado
(3) que emplea una plataforma de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado por que consiste:
- en la adquisición anteriormente a la intervención neuroquirúrgica, de primeras imágenes digitales de la zona a tratar y en la transferencia de estas imágenes digitales hacia la consola de planificación por medio de una red
o de un soporte físico para ser registradas y tratadas allí, -en la adquisición automática sin contacto en la fase peroperatoria, con ayuda de un instrumento de barrido portado por el órgano receptor del segmento distal terminal del brazo robotizado, de segundas imágenes digitales de una parte pertinente de una región corporal del paciente que ya aparece en las primeras imágenes digitales, y en la transferencia de estas segundas imágenes digitales hacia la consola de planificación para ser registradas y tratadas allí, -en la construcción de un primer modelo digital en tres dimensiones a partir de las primeras imágenes digitales, haciendo aparecer dicho modelo a la región corporal pertinente del paciente, -en la construcción de un segundo modelo digital en tres dimensiones a partir de las segundas imágenes digitales, haciendo aparecer también a la región corporal pertinente del paciente, -y en la puesta en correspondencia de los primer y segundo modelos mediante superposición de las representaciones de la región corporal pertinente que aparecen en uno y otro modelo.
18. Procedimiento de reajuste de acuerdo con la reivindicación anterior, caracterizado por que para la construcción del segundo modelo digital se utilizan los datos suministrados por el telémetro láser (144) y por las dos cámaras 141 del medio de captura de imágenes (14).
Patentes similares o relacionadas:
UN MECANISMO LIMITADOR DE UNA HERRAMIENTA, del 1 de Julio de 2011, de Stanmore Implants Worldwide Limited: Un mecanismo limitador de una herramienta que comprende un manipulador y un mecanismo de centrado remoto montado en el mismo, proporcionando […]
SISTEMA QUIRÚRGICO ULTRASÓNICO, del 24 de Junio de 2011, de ETHICON ENDO-SURGERY, INC.: - Un sistema quirúrgico ultrasónico que comprende: una unidad ultrasónica que incluye un instrumento conectado operativamente a un generador […]
 INSTRUMENTAL QUIRÚRGICO, del 5 de Abril de 2011, de VLEUGELS HOLDING B.V: Instrumento quirúrgico, en particular, para cirugía mínimamente invasiva, comprendiendo el instrumento un bastidor alargado que, en la proximidad de un […]
INSTRUMENTAL QUIRÚRGICO, del 5 de Abril de 2011, de VLEUGELS HOLDING B.V: Instrumento quirúrgico, en particular, para cirugía mínimamente invasiva, comprendiendo el instrumento un bastidor alargado que, en la proximidad de un […]
 CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
 DISPOSITIVO HAPTICO PARA CIRUGIA VIRTUAL, del 1 de Junio de 2008, de UNIVERSIDAD REY JUAN CARLOS: Dispositivo háptico para cirugía virtual, de propósito general que permite la simulación de cualquier técnica de cirugía, el cual comprende […]
DISPOSITIVO HAPTICO PARA CIRUGIA VIRTUAL, del 1 de Junio de 2008, de UNIVERSIDAD REY JUAN CARLOS: Dispositivo háptico para cirugía virtual, de propósito general que permite la simulación de cualquier técnica de cirugía, el cual comprende […]
SISTEMA DE TELEPRESENCIA MULTICOMPONENTE Y PROCEDIMIENTO DE PREPARACIÓN CORRESPONDIENTE, del 4 de Enero de 2012, de Intuitive Surgical Operations, Inc: Sistema quirúrgico robotizado para realizar un proceso dentro de un campo estéril, comprendiendo: un instrumento quirúrgico ; un ensamblado de manipulación […]
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]