PINZAS PARA CIRUGIA LAPAROSCÓPICA MÍNIMAMENTE INVASIVA.
Pinzas para cirugía laparoscópica mínimamente invasiva.
Comprenden unas garras (70) montadas en un cuerpo giratorio (60),
primeros medios (100) y segundos (200) de transmisión del movimiento de las garras (70) y el cuerpo giratorio (60), respectivamente, que comprenden respectivamente al menos un tendón (300, 350, 400) formado por varios cables (500) dispuestos de manera que la sección transversal de por lo menos el tendón (300, 350) asociado a los primeros medios (100) de transmisión presenta una geometría variable (A, B, C) a lo largo del mismo formada por una primera disposición (A) en la que los cable (500) están dispuestos, en sección transversal, con sus ejes longitudinales en una distribución radial (A), una segunda disposición (B) en la que dichos ejes quedan dispuestos en una primera orientación, y una tercera disposición (C) en la que dichos ejes quedan dispuestos en una segunda orientación, perpendicular a la primera orientación.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200902132.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Inventor/es: AMAT GIRBAU,JOSEP.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/29 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Pinzas para la cirugía mínimamente invasiva.
- A61B19/00
Fragmento de la descripción:
Campo de la invención
La presente invención tiene aplicación en el campo de la cirugía robótica y se refiere, en particular, a unas pinzas adecuadas para cirugía 5 laparoscópica robótica mínimamente invasiva.
La pinzas objeto de la presente invención están formadas por un conjunto cinemática provisto de unas garras que pueden abrirse y cerrarse, las cuales van montadas en un cuerpo giratorio. Las pinzas de la invención
1 o incorporan también primeros medios de transmisión del movimiento de las garras y segundos medios de transmisión del movimiento del cuerpo giratorio.
Antecedentes de la invención
Las actuales técnicas de cirugía laparoscópica robótica permiten llevar a cabo intervenciones de alta precisión, proporcionando relevantes ventajas especialmente en cirugías de cierta complejidad, en particular aquellas en las que existe gran dificultad de acceso al sitio de operación. La presente
2 o invención es de particular aplicación en este tipo de cirugía laparoscópica robótica, que constituye una técnica mínimamente invasiva al realizarse a través unas pequeñas incisiones en el paciente. Dicha técnica está siendo ampliamente utilizada en la actualidad, llegándose a emplear en ~uchos casos como sustitución de la cirugía laparoscópica convencional.
En este tipo de intervención robótica se emplean dispositivos de brazos robóticas que accionan pinzas capaces de sujetar determinados útiles e instrumentos. Además de la precisión quirúrgica conseguida por el uso de la informática asociada en estas intervenciones, estos mecanismos 3 o permiten reducir el contacto directo del cirujano sobre el paciente, con la consecuente reducción de infecciones. Con una pequeña incisión se introducen en el paciente cámaras y/o pinzas para realizar diferentes operaciones con un mínimo trauma y una secuela dolorosa postoperatoria prácticamente despreciable.
El término "pinzas" tal como se utiliza aquí de acuerdo con el uso pretendido por el objeto de la presente invención debe entenderse como un útil destinado a acoplarse en el extremo de un brazo robótico. Este brazo robótico es accionado normalmente a distancia por un cirujano técnico en
operaciones de cirugía laparoscópica robótica y está diseñado para agarrar e incluso mantener en suspensión, cualquier útil, herramienta, órgano o dispositivo.
Existen muchos tipos de pinzas laparoscópicas en función de su
1º movimiento y geometría, aspectos que dependen en gran medida del tipo de intervención a la cual van finalmente destinadas las pinzas. En una intervención de cirugía laparoscópica se utilizan normalmente varias pinzas, las cuales suelen presentar una configuración tal que en su extremo distal se disponen unas garras de distinta configuración como se
ha indicado anteriormente, por ejemplo, con o sin dientes, de forma recta o curva, etc.
Un ejemplo de pinza laparoscópica utilizada en la cirugía laparoscópica robótica es la que se describe en la patente americana US6969385. En 2 o este documento se muestra una pinza para utilizarse en un dispositivo robótico y está formada por unas garras que se encuentran montadas en un cuerpo también giratorio. Las garras están formadas por unos dedos que pueden girar entre sí. La transmisión del movimiento en rotación de los dedos de las garras se realiza a través de unos cables que se enrollan en
2 5 unas poleas acanaladas. Las poleas van montadas en correspondencia con los ejes de giro de los dedos y el eje del citado cuerpo giratorio que se encuentra acoplado al extremo del brazo robótico, respectivamente.
Otro ejemplo de transmisión de movimiento de las pinzas es a través de
engranajes. En el documento US2009192521 se describe un instrumento quirúrgico formado por unas pinzas que incluyen un dedo fijo y un dedo móvil. El dedo móvil de las pinzas es accionado a través un mecanismo de tren de engranajes.
3 5 El uso de cables y poleas o engranajes en pinzas como las descritas en
este documento es necesario para transmitir el movimiento desde unos medios motores a la propia pinza para orientarla y mover las garras. Esto tiene como resultado que el mecanismo de la pinza se complique considerablemente. Tal complicación mecánica es de gran relevancia en el 5 caso en el que los cables de transmisión de movimiento tienen que atravesar un cuerpo articulado, lo cual normalmente sucede en unas pinzas del tipo descrito. El hecho de que los cables de transmisión tengan que atravesar un cuerpo articulado hace necesaria la incorporación de poleas adicionales para poder realizar dicha transmisión de movimiento de los
1º medios motores a las garras.
La invención presenta unas pinzas para cirugía laparoscópica con una configuración que permite la transmisión de movimiento entre un conjunto cinemática formado por diversos elementos giratorios desde unos medios 15 motores a unos elementos giratorios. Este conjunto cinemática de las pinzas comprende elementos que permiten orientar las pinzas y elementos que permiten mover las garras de las pinzas. Tal como se verá en lo sucesivo, con las pinzas para cirugía laparoscópica de la invención se consigue este objetivo con una configuración simple, compacta y fiable,
2º obteniéndose ventajas adicionales, tal como se verá en lo sucesivo.
Descripción de la invención
La presente invención consiste en unas pinzas adecuadas para utilizarse
en un brazo robótica. Más concretamente, la invención se refiere a unas pinzas destinadas a ser utilizadas para llevar a cabo intervenciones de cirugía laparoscópica mínimamente invasiva, accionadas por brazos robóticas.
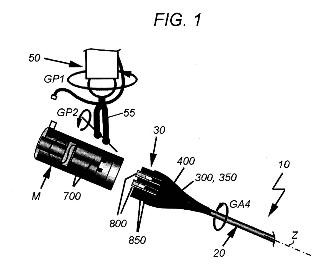
De acuerdo con la invención, se disponen unas pinzas, para su uso en intervenciones de cirugía laparoscópica robotizada, que comprenden un cuerpo principal que presenta un extremo proximal y un extremo distal. El extremo proximal del cuerpo está adaptado para recibir una articulación universal que puede realizar dos giros pasivos. En el extremo distal del
35 cuerpo principal hay acoplado un conjunto cinemática formado por un cuerpo montado giratorio en dicho extremo y que va provisto de unas garras. Este cuerpo giratorio puede realizar varios giros activos.
Las garras de las pinzas de la invención comprenden al menos dos partes
móviles o dedos que pueden ser accionados en rotación de manera independiente. El movimiento de los dedos de las garras se lleva a cabo a través de primeros medios de transmisión del movimiento. Por su parte, el movimiento en rotación del cuerpo giratorio se lleva a cabo a través de segundos medios de transmisión del movimiento. Dichos primeros y
1º segundos medios de transmisión reciben el movimiento de unos medios motores, formados, por ejemplo, por unos motores eléctricos. La combinación de los medios motores y los primeros y segundos medios de transmisión permite orientar adecuadamente las pinzas, así como permitir la apertura y cierre de las garras, acercando y alejando sus dedos entre sí.
De acuerdo con la invención, tanto los primeros como los segundos medios de transmisión del movimiento comprenden unos tendones que se extienden en el interior del cuerpo principal, a lo largo del mismo, entre su extremo proximal y su extremo distal. En funcionamiento, dichos tendones
2 o pueden desplazarse longitudinalmente a lo largo del citado cuerpo principal.
Más concretamente, las pinzas comprenden al menos un tendón asociado a los primeros de transmisión del movimiento y un tendón asociado a los
2 5 segundos medios de transmisión del movimiento. Los primeros medios de transmisión del movimiento pueden comprender uno o dos tendores en función de la realización de las pinzas, ya sea para accionar uno o más dedos de las garras, en función de la aplicación a la que se destinen las pinzas. 30 Cada uno de dichos tendones está formado por varios cables de acero, preferiblemente tres, los cuales se disponen empaquetados en el interior de una funda que los encierra. Los cables que forman cada tendón presenten preferiblemente una sección transversal de forma circular para conseguir la 3 5 mayor rigidez posible, y evitar así el pandeo cuando se trabaja...
Reivindicaciones:
1. Pinzas (1 O) para cirugía laparoscópica mínimamente invasiva que comprenden unas garras (70) montadas en un cuerpo giratorio (60}, 5 primeros medios (1 00) de transmisión del movimiento de las garras (70) y segundos medios (200) de transmisión del movimiento del cuerpo giratorio (60}, caracterizadas por el hecho de que dichos primeros y segundos medios de transmisión (1 00, 200) comprenden respectivamente al menos un tendón (300, 350, 400) formados cada uno por varios cables (500)
1 o dispuestos de manera que la sección transversal de por lo menos el tendón (300, 350) asociado a los primeros medios (1 00) de transmisión del movimiento presenta una geometría variable (A, B, C) a lo largo de su recorrido por el interior de un cuerpo principal (60) .
2-Pinzas (1 O) según la reivindicación 1, caracterizadas por el hecho de que la geometría en sección transversal de cada tendón (300, 350) presenta una primera disposición (A) en la que los respectivos cables (500) se encuentran dispuestos, en sección transversal, con sus ejes longitudinales en una distribución radial (A) , una segunda disposición (B) en la que los
2 o respectivos cables (500) de cada tendón (300, 350) se encuentran dispuestos, en sección transversal, con sus ejes longitudinales en una distribución en una primera orientación, y una tercera disposición (C) en la que los respectivos cables (500) de cada tendón (300, 350) quedan dispuestos, en sección transversal, con sus ejes longitudinales en una
segunda orientación, distinta de dicha primera orientación.
3. Pinzas (1 O) según la reivindicación 2, caracterizadas por el hecho de que dicha primera y segunda orientación, de la segunda y tercera disposición (B, C}, respectivamente, forman un ángulo substancialmente de 90° entre
SÍ.
4. Pinzas (1 O) según cualquiera de las reivindicaciones anteriores, caracterizadas por el hecho de que al menos uno de dichos tendones (300, 350, 450) está formado por al menos tres cables (500) .
5. Pinzas (1 O) según cualquiera de las reivindicaciones anteriores, caracterizadas por el hecho de que dichas garras (70) están adaptadas para girar alrededor de un primer eje (X) .
6-Pinzas (1 O) según cualquiera de las reivindicaciones anteriores, caracterizadas por el hecho de que el citado cuerpo giratorio (60) puede girar alrededor de un segundo eje (Y) .
7. Pinzas (1 O) según las reivindicaciones 5 y 6, caracterizadas por el hecho 1º de que dicho primer eje (X) y dicho segundo eje (Y) forman un ángulo substancialmente de 90° entre sí.
8. Pinzas (1 O) según cualquiera de las reivindicaciones anteriores, caracterizadas por el hecho de que el citado cuerpo giratorio (60) incluye 15 unos tambores giratorios (81, 82) asociados respectivamente a dichas garras (70) .
9. Pinzas (1 O) según cualquiera la reivindicación 8, caracterizadas por el hecho de que el dichos tambores giratorios (81, 82) están adaptados para
2 o ser accionados de manera independiente cada uno por un tendón respectivo (300, 350) de dichos primeros medios de transmisión (1 00) .
10. Pinzas (1 O) según cualquiera de las reivindicaciones anteriores, caracterizadas por el hecho de que comprenden unos módulos (600) de 2 5 cambio de orientación de los cables (500) que forman cada tendón (300, 350) , estando formado cada módulo (600) por un bloque en cuyo interior hay formado un canal alargado (605) conformado para guiar dichos cables
(500) del correspondiente tendón provocando un giro en su orientación.
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]