PINZA.
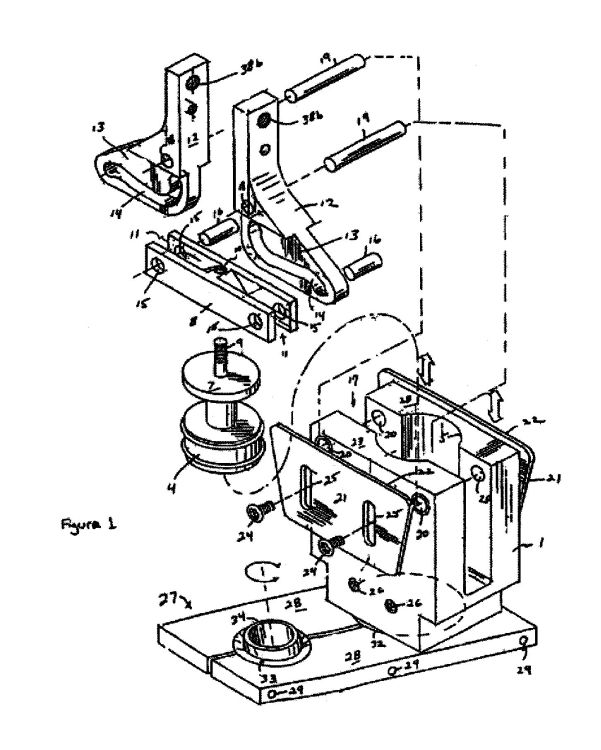
Un ensamblaje de pinza que consta de: un cuerpo que posee una estructura de horquilla (44) definida en un extremo del misma por un primer y un segundo elemento de pared distanciados de forma independiente,
y un accionador accionado por fluido en el extremo opuesto; el primer y el segundo elemento de mandíbula (49), montados de forma pivotante en relación con la horquilla, teniendo puntas de mandíbula opuestas cada uno de los elementos de mandíbula (49) y pudiéndose extraer y sustituir cada uno de ellos mediante otros elementos de mandíbula, e incorporando cada uno de ellos una ranura de paso individual (48) dispuesta en los mismos, teniendo cada ranura de paso (48) el primer y el segundo extremo cerrado, un segmento pivotante central (43) y un segmento de bloqueo (41, 42) en ambos extremos; un pasador de leva (47), extendiéndose un extremo del mismo en el interior de la ranura de paso individual alargada (48) del primer elemento de mandíbula (49) y extendiéndose el otro extremo del mismo en el interior de la ranura de paso individual alargada del segundo elemento de mandíbula (49); y, una estructura articulada accionada por el accionador y acoplada al pasador de leva (47), en la que la porción del primer elemento de mandíbula (49) que incluye la ranura de paso (48) está ubicada entre la estructura articulada y el primer elemento de pared, mientras que la porción del segundo elemento de mandíbula (49) que incluye la ranura de paso (48) está ubicada entre la estructura articulada y el segundo elemento de pared, dispuesta de manera que cuando se recibe el pasador de leva (47) en el segmento de bloqueo (41; 42) de la ranura de paso (48), se mantiene de forma selectiva el pasador de leva (47) para impedir que se muevan los elementos de mandíbula (49) hasta que se accione la estructura articulada mediante el accionador, manteniendo por lo tanto los elementos de mandíbula (49) en su lugar reduciendo la presión del fluido procedente del accionador accionado por fluido.
Tipo: Resumen de patente/invención.
Solicitante: PHD, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 9009 CLUBRIDGE ROAD, P.O. BOX 9070,FORT WAYNE, IN 46899.
Inventor/es: MOILANEN, STEVEN M., MCINTOSH, BRUCE D..
Fecha de Publicación: .
Fecha Solicitud PCT: 3 de Octubre de 1997.
Fecha Concesión Europea: 16 de Julio de 2008.
Clasificación PCT:
- B25J15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › servocontroladas.
- B25J15/04 B25J 15/00 […] › con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
Países PCT: Bélgica, Alemania, Dinamarca, España, Francia, Reino Unido, Italia, Suecia.
Patentes similares o relacionadas:
DISPOSITIVO, SISTEMA Y MÉTODO DE FIJACIÓN CONTROLABLE MEDIANTE UN BRAZO MECÁNICO, del 2 de Abril de 2020, de UNIVERSIDAD DE MALAGA: Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
Dispositivo, sistema y método de fijación controlable mediante un brazo mecánico, del 27 de Marzo de 2020, de UNIVERSIDAD DE MALAGA: Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles […]
Mecanismo para cambio rápido de efector terminal robótico con acoplador magnético conmutable con soporte de momento, del 20 de Noviembre de 2019, de THE BOEING COMPANY: Un aparato de acoplamiento para cambio rápido de efector terminal robótico que comprende: un manipulador robótico que tiene movimiento controlable […]
Aparato de desconexión rápida para herramientas modulares, del 2 de Octubre de 2019, de Norgren Automation Solutions, LLC: Receptor de herramientas modulares, que comprende: una pared , que tiene un orificio que se extiende a través de la misma; […]
Abrazadera con un cilindro hidráulico de sujeción de carga con múltiples etapas telescópicamente extensibles, adaptadas para aplicar la fuerza de sujeción de carga alternativamente sensible a la fuerza de elevación de carga o al tamaño de la carga, del 3 de Julio de 2019, de CASCADE CORPORATION: Un sistema hidráulico de sujeción y elevación de carga que incluye al menos un cilindro hidráulico de sujeción de carga de un tipo con al menos una […]
Sistema adaptado a un robot para manipular objetos voluminosos, del 22 de Mayo de 2019, de PROYTECSA SECURITY, S.L: Un sistema adecuado para adaptarse a un robot que presenta un brazo articulado rematado en pinza, comprendiendo el sistema, para cada una de las hojas que conforma la pinza […]
Disposición de rampa con característica de extracción, del 17 de Mayo de 2019, de BECKMAN COULTER, INC.: Elemento adaptado para liberar un objeto agarrado por una unidad de agarre, en el que dicha unidad de agarre incluye una pluralidad […]