Pinza y aparato relacionado para manipular objetos.
Pinza (1) para manipular objetos, que comprende:
un árbol de soporte (2) con un eje longitudinal;
un soporte (5) para un par de mandíbulas (3 y 4) conectado al árbol de soporte (2), dichas mandíbulaspudiéndose mover en modos de alejamiento y acercamiento recíproco, para permitir la apertura y el cierre dela pinza;
medios de accionamiento para mover dichas mandíbulas; y
medios de activación para activar dichos medios de accionamiento, dichos medios de activación estando dispuestos en una posición substancialmente coaxial con respecto al eje
de dicho árbol de soporte (2) y moviéndose a lo largo de una dirección vertical si se ejerce una fuerza verticalcoaxial al eje de dicho árbol de soporte (2),
caracterizada porque dichos medios de activación están conectados cinemáticamente a los medios deaccionamiento para activarlos a lo largo de una dirección horizontal, con lo cual las mandíbulas (3 y 4) son accionadas perpendicularmente con respecto a la dirección de aplicación de dicha fuerza vertical.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08425455.
Solicitante: WILD PARMA S.R.L.
Nacionalidad solicitante: Italia.
Dirección: VIA VIII MARZO 85 43044 COLLECCHIO (PR) ITALIA.
Inventor/es: FURLOTTI,FILIPPO, Signifredi,Luca.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21D51/42 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 51/00 Fabricación de objetos huecos (a partir de tubos con paredes espesas o no uniformes B21K 21/00). › Fabricación o fijación de cuellos.
- B31B19/84
- B65B61/18 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 61/00 Dispositivos accesorios diversos que operan sobre hojas, cintas, bandas, ataduras, receptáculos o paquetes, no previstos en otro lugar. › para aplicar o incorporar elementos de apertura o de desembalado de paquetes, p. ej. bandas de desgarre.
- B65G47/84 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Ruedas con forma de estrellas o dispositivos de correas o cadenas sin fin, estando dotadas las ruedas o dispositivos de elementos que enganchan a los objetos.
PDF original: ES-2387832_T3.pdf
Fragmento de la descripción:
Pinza y aparato relacionado para manipular objetos.
La presente invención se refiere a una pinza y a un aparato relacionado para manipular objetos.
Más en particular, la presente invención se refiere a una pinza para un aparato en el sector del llenado de recipientes flexibles con bebidas, en particular un aparato para transferir pitorros o picos.
Normalmente, dichos recipientes flexibles comprenden una “bolsa o petaca”, hecha de polietileno (PE) , y un “pitorro o pico” para permitir el vertido del producto contenido dentro del recipiente, generalmente apretando la bolsa o petaca.
Generalmente, el ensamblado de los recipientes flexibles es llevado a cabo según se indica a continuación.
Antes del llenado, dentro de una abertura superior de la bolsa o petaca es introducido el pitorro o pico, el cual, sucesivamente, es soldado a bordes dispuestos en las orillas de dicha abertura. En particular, los recipientes flexibles son ensamblados directamente en ruedas de tipo estrella de soldadura abriendo una bolsa o petaca, introduciendo el pitorro o pico dentro de la abertura y luego soldando los bordes de la bolsa o petaca al pitorro o
pico.
Para asegurar la alimentación de un flujo continuo de bolsas o petacas y pitorros o picos hacia la rueda de tipo estrella de procesamiento, por ejemplo una rueda de tipo estrella de soldadura, se conoce, a partir del documento WO 2006030464 un aparato para alimentar bolsas o petacas y sus respectivos pitorros o picos a una máquina
rotativa para el procesamiento de los mismos, que comprende por lo menos un depósito para las bolsas o petacas y por lo menos un depósito para los pitorros o picos. Tal aparato comprende una unidad de manipulación adecuada para tomar una bolsa o petaca y un pitorro o pico desde sus respectivos depósitos y alimentarlos simultáneamente, y de manera continua, a la máquina rotativa que los procesa. Dicha unidad de manipulación comprende medios para tomar una bolsa o petaca y medios para tomar un pitorro o pico.
En particular, los medios para tomar los pitorros o picos comprenden una pluralidad de pinzas, cada una de ellas estando fijada a un respectivo árbol de apoyo o soporte giratorio alrededor de un eje vertical.
Durante la rotación, un rodillo fijado en cada pinza llega en una leva fija, golpeándola lo cual fuerza al mismo rodillo a
deslizarse por una acanaladura provista en la pinza, accionando así un sistema de palancas que supera la fuerza de un resorte que sostiene las mandíbulas de la pinza en una posición de cierre. El movimiento del sistema de palancas permite la apertura de las mandíbulas de la pinza, tanto durante la etapa de toma como durante la entrega de los pitorros o picos a la máquina de procesamiento, por ejemplo una máquina soldadora.
El rodillo está dispuesto a distancia definida con respecto al eje vertical del árbol, del lado opuesto con respecto a las mandíbulas de la pinza.
Un inconveniente importante de tal tipo de pinza es su baja precisión, tanto durante la etapa de toma como durante la etapa de entrega del pitorro o pico a la máquina soldadora.
45 En efecto, el choque entre el rodillo y la leva es un golpe sin retorno y, por lo tanto, la pinza sufre una aceleración angular alrededor del eje vertical del árbol de soporte, debido a la posición del rodillo, que está lejos de dicho eje vertical.
50 Dicha aceleración angular no puede producir una velocidad angular debido a la presencia de la leva y, por lo tanto, produce una cantidad de movimiento alrededor del eje vertical. Dicha cantidad de movimiento sacude la pinza y por tanto perjudica la precisión tanto de la etapa de toma como de la etapa de entrega de los pitorros o picos. Otra importante desventaja se refiere a un aparato provisto de tal tipo de pinza. En efecto, en el caso de parada de la planta, es imposible abrir, simultánea y automáticamente, todas las pinzas instaladas en el aparato, para soltar los
55 pitorros o picos ya tomados. En efecto, el rodillo de cada pinza no está en contacto permanente con la leva y, por lo tanto, no hay medios capaces activar en cualquier momento el movimiento del sistema de palancas de cada pinza, para soltar los pitorros o picos.
El documento US 4.059.188 describe una articulación de cuatro barras accionada manualmente en un dispositivo de
60 transporte que permite la extracción manual de preformas u otras piezas de trabajo cuando no han sido expulsadas del dispositivo en la estación de descarga deseada.
Un objetivo de la presente invención para resolver los inconvenientes mencionados con anterioridad es el de proporcionar una pinza capaz brindar elevada precisión, tanto durante la etapa de toma como durante la etapa de
65 entrega de objetos, en particular pitorros o picos para recipientes flexibles.
Otro objetivo de la presente invención es el de proporcionar un aparato para manipular objetos, en particular pitorros
o picos para recipientes flexibles, capaz soltar, simultánea y automáticamente, todos los objetos ya tomados.
Además, un objetivo de la presente invención es el de presentar una pinza y un aparato relacionado para manipular objetos que sean fiables y fáciles de fabricar. Dichos objetivos se logran en su totalidad a través de una pinza y un aparato relacionado para manipular objetos, de acuerdo con la presente invención y caracterizados por lo expuesto en las reivindicaciones que se adjuntan.
Esos y otros objetivos se pondrán aún más de manifiesto en la descripción que sigue de una realización preferida ilustrada, a título puramente ejemplificador y no limitativo, mediante las láminas de dibujos anexas, en las cuales:
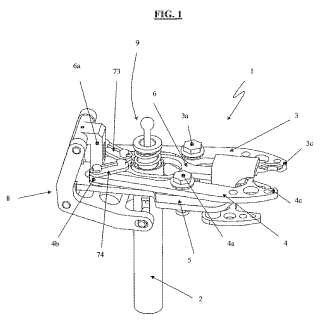
- la figura 1 es una vista axonométrica de una pinza de acuerdo con la presente invención, en una primera
posición operativa;15 - la figura 2 es una vista frontal, parcialmente en corte transversal, de la pinza ilustrada en la figura 1;
- la figura 3 es una vista en planta de la pinza ilustrada en las figuras anteriores;
- la figura 4 es una vista axonométrica de la pinza ilustrada en las figuras anteriores, en una segunda posición operativa;
- la figura 5 es una vista frontal, parcialmente en corte transversal, de la pinza ilustrada en la figura 4, en dicha 20 segunda posición operativa;
- la figura 6 es una vista en planta de la pinza ilustrada en las figuras 4 y 5, en dicha segunda posición operativa;
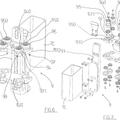
- la figura 7 es una vista axonométrica de un aparato para manipular objetos, de acuerdo con la presente invención;
-la figura 8 muestra un detalle del aparato ilustrado en la figura 7, con la pinza en dicha primera posición operativa;
- la figura 9 muestra otro detalle del aparato ilustrado en la figura 7, con la pinza en dicha segunda posición operativa;
- la figura 10 muestra otra realización del aparato ilustrado en la figura 7.
Haciendo referencia en particular a las figuras de 1 a 6, con el número 1 se denota una pinza, en su totalidad, de acuerdo con la presente invención.
Dicha pinza comprende un árbol de soporte (2) y una primera y una segunda mandíbula (3 y 4) fijadas con libertad
de oscilación sobre un soporte substancialmente horizontal (5) conectado al árbol. Las mandíbulas (3 y 4) están dispuestas enfrentadas entre sí y giran alrededor de pivotes (3a y 4a) respectivos de tal manera que se separan y acercan recíprocamente, para permitir la apertura y el cierre de la pinza (1) .
La pinza comprende medios de accionamiento para mover las mandíbulas y medios de activación para activar 40 dichos medios de accionamiento.
En el ejemplo ilustrado, los medios de accionamiento comprenden un cursor (6) móvil sobre el soporte (5) y conectado cinemáticamente a las mandíbulas (3 y 4) . En particular, el cursor (6) está conectado a las extremidades libres (3b y 4b) de cada mandíbula, a una distancia definida con respecto a los pivotes (3a y 4a) y del lado opuesto
45 con respecto a las porciones operativas (3c y 4c) adecuadas para manipular objetos, en particular pitorros o picos... [Seguir leyendo]
Reivindicaciones:
1. Pinza (1) para manipular objetos, que comprende:
un árbol de soporte (2) con un eje longitudinal; un soporte (5) para un par de mandíbulas (3 y 4) conectado al árbol de soporte (2) , dichas mandíbulas pudiéndose mover en modos de alejamiento y acercamiento recíproco, para permitir la apertura y el cierre de la pinza; medios de accionamiento para mover dichas mandíbulas; y
medios de activación para activar dichos medios de accionamiento, dichos medios de activación estando dispuestos en una posición substancialmente coaxial con respecto al eje de dicho árbol de soporte (2) y moviéndose a lo largo de una dirección vertical si se ejerce una fuerza vertical coaxial al eje de dicho árbol de soporte (2) , caracterizada porque dichos medios de activación están conectados cinemáticamente a los medios de
accionamiento para activarlos a lo largo de una dirección horizontal, con lo cual las mandíbulas (3 y 4) son accionadas perpendicularmente con respecto a la dirección de aplicación de dicha fuerza vertical.
2. Pinza según la reivindicación 1, en la que los medios de activación comprenden un pistón (7) que se desplaza dentro de dicho árbol de soporte (2) de modo alternativo entre una primera posición operativa, que corresponde al
cierre de la pinza, y una segunda posición operativa, que corresponde a la apertura de la pinza, estando dicho pistón dispuesto coaxialmente con respecto al eje de dicho árbol de soporte y estando conectado operativamente a los medios de accionamiento.
3. Pinza según la reivindicación 2, en la que dichos medios de accionamiento comprenden un cursor (6) móvil sobre
dicho soporte (5) y están conectados cinemáticamente a las mandíbulas (3 y 4) para hacer que las mismas se alejen y se acerquen, siendo dicho cursor movido alternativamente entre una primera posición operativa, que corresponde a la apertura de la pinza (1) , y una segunda posición operativa, que corresponde al cierre de la pinza (1) .
4. Pinza según la reivindicación 3, en la que dichos medios de activación además comprenden un sistema de 30 palancas (8) instalado en dicho soporte (5) y acoplado al pistón (7) y al cursor (6) .
5. Pinza según la reivindicación 4, en la que dicho sistema de palancas (8) posee al menos un brazo inferior (8a) y al menos un brazo superior (8b) conectado a dicho brazo inferior, estando una extremidad (98a) del brazo inferior (8a) acoplada al pistón (7) y una extremidad (98b) del brazo superior (8b) estando acoplada al cursor (6) .
6. Pinza según la reivindicación 3, en la que las mandíbulas (3 y 4) están instaladas con libertad de rotación sobre dicho soporte (5) .
7. Pinza según la reivindicación 6, en la que dicho cursor (6) está conectado a extremidades libres (3b y 4b) de cada
mandíbula, a una distancia definida con respecto a los puntos de articulación (3a y 4a) y del lado opuesto con respecto a porciones operativas (3c y 4c) de la pinza (1) adecuadas para la manipulación de objetos.
8. Pinza según la reivindicación 2, en la que dicho pistón (7) está provisto de una sede o asiento superior (7a) para
alojar, al menos parcialmente, una palanca de control (9) que sirve para la activación del movimiento alternativo de 45 dicho pistón.
9. Pinza según la reivindicación 8, en la que dicha palanca de control (9) está provista de dos expansiones, estando una expansión inferior (9a) alojada dentro de dicha sede (7a) y una expansión superior (9b) pudiendo ser asociada operativamente a un dispositivo rodillo-leva.
10. Pinza según una cualquiera de las reivindicaciones precedentes 8 ó 9, en la que el pistón además está provisto de un collar (7b) que rodea a dicha sede superior (7a) y que define un contraste para una porción superior de un elemento elástico (10) acoplado al pistón (7) , estando provisto el contraste para la porción inferior de dicho elemento elástico dentro de dicho árbol de soporte (2) .
11. Aparato para manipular objetos, que comprende una pluralidad de unidades de manipulación (202) diseñadas para poder tomar objetos desde un depósito y alimentarlos a una máquina de procesamiento, caracterizado porque cada unidad de manipulación comprende una pinza según una cualquiera de las reivindicaciones precedentes.
60 12. Aparato según la reivindicación 11, que además comprende una pluralidad de dispositivos de activación (207) , estando cada uno de ellos conectado operativamente a los medios de activación de una pinza de una correspondiente unidad de manipulación, para controlar la apertura y el cierre de la misma pinza.
13. Aparato según la reivindicación 12, que además comprende medios de liberación para soltar, simultánea y 65 automáticamente, los objetos ya tomados por las pinzas, pudiéndose mover dichos medios de liberación entre una posición retraída, en la cual están alejados con respecto a dichos dispositivos de activación (207) , y una posición extraída, en la cual actúan sobre los dispositivos de activación (207) para permitir la apertura simultánea de las pinzas.
14. Aparato según la reivindicación 12, en el que dichas unidades de manipulación (202) están fijadas a una plataforma rotativa inferior (203) engargolada a un árbol principal (204) y dichos dispositivos de activación (207) están dispuestos sobre una plataforma rotativa superior (206) engargolada a dicho árbol principal (204) .
Patentes similares o relacionadas:
Aparato y método para envasar bolsitas, del 3 de Junio de 2020, de Universal Pack S.r.l: Aparato para el envasado de bolsitas que comprende: - una unidad de envasado primaria configurada para suministrar dichas bolsitas […]
Aparato y método para orientar el cierre de extremo de un recipiente de bebida y aplicación de símbolos en una ubicación predeterminada, del 29 de Abril de 2020, de BALL CORPORATION: Un método para orientar y decorar un cierre de extremo para un recipiente de bebida, que comprende: proporcionar el cierre de extremo que comprende un ribete […]
Aparato para recibir y transportar una corriente de huevos, del 22 de Abril de 2020, de Moba Group B.V: Aparato para recibir y transportar una corriente de huevos, que comprende, - una transportadora para transportar huevos (E) en una dirección de transporte T, […]
Aparato de transporte para una máquina de envasado de pasta alimenticia, productos granulares y similares, del 22 de Abril de 2020, de ALTOPACK S.P.A.: Aparato de transporte capaz de transportar horizontalmente una pluralidad de envases que contienen alimentos, que comprende una cadena de bucle cerrado que se […]
Aparatos de transporte, del 15 de Abril de 2020, de FUJI MACHINERY CO., LTD: Un aparato de transporte que comprende: una sección de soporte configurada para soportar una pluralidad de artículos (P) sobre la misma […]
Un aparato para desplazar artículos que avanzan continuamente a lo largo de una dirección de avance, del 1 de Abril de 2020, de MARCHESINI GROUP S.P.A.: Un aparato para desplazar artículos que avanzan continuamente a lo largo de una dirección de avance (A), teniendo los artículos que ser desplazados y empujados transversalmente, […]
 Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Dispositivo de transporte y método de producción de artículos ponibles desechables mediante su uso, del 27 de Noviembre de 2019, de ZUIKO CORPORATION: Un dispositivo de transporte para transportar un objeto (A) a una superficie de una lámina (S1, S2), que comprende: un rodillo de entrega […]