Pinza de robot y robot de manipulación.
Pinza de robot (20) para asir, transportar y depositar artículos que se deben transportar (60),
en particular bultosde equipaje tales como maletas y bolsas de viaje, con
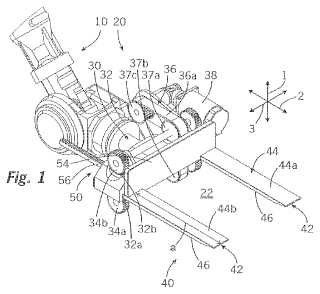
- una base de pinza (30) con un dispositivo de acoplamiento (32) para la fijación a un brazo de robot (10),
- un dispositivo portador (40), que se extiende en una dirección longitudinal de la pinza (2), con una superficiede apoyo (44), que sirve para el apoyo del artículo que se debe transportar (60) y que se extiendeesencialmente en la dirección longitudinal de la pinza (2) y en una dirección transversal de la pinza (3),
- un dispositivo de desplazamiento (50), el cual está dispuesto en una dirección vertical de la pinza (1) porencima del dispositivo portador (40) y que sirve para aplicar una fuerza sobre el artículo que se debetransportar (60) en la dirección longitudinal de la pinza (2),
- pudiendo desplazarse el dispositivo de desplazamiento (50) y el dispositivo portador (40) en cada caso en ladirección longitudinal de la pinza (2) con respecto a la base de la pinza (30),
caracterizada porque
- el dispositivo de desplazamiento (50) y el dispositivo portador (40) están concebidos para ser desplazados,simultáneamente y en sentido contrario, con respecto a la base de la pinza (30), estando prevista para ellouna transmisión (36), mediante la cual se da lugar a un acoplamiento mecánico forzado entre el movimientodel dispositivo de desplazamiento (50) con respecto a la base de la pinza (30), por un lado, y el movimientodel dispositivo portador (40) con respecto a la base de pinza (30), por el otro.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11162236.
Solicitante: IPR-Intelligente Peripherien für Roboter GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Industriestrasse 29 74193 Schwaigern ALEMANIA.
Inventor/es: EHRENLEITNER, FRANZ.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
PDF original: ES-2426030_T3.pdf
Fragmento de la descripción:
Pinza de robot y robot de manipulación.
Campo de utilización y estado de la técnica La invención se refiere a una pinza de robot para asir, transportar y depositar artículos que se deben transportar, en particular bultos tales como maletas y bolsas de viaje, según el preámbulo de la reivindicación 1.
Una pinza de robot genérica, como se conoce a partir del documento DE 10 2005 022 828 A1, presenta una base de pinza, en la cual está previsto un dispositivo de acoplamiento para la disposición de la pinza de robot en un brazo de robot. Una pinza de robot genérica presenta además un dispositivo portador con una superficie de apoyo, la cual sirve para el apoyo del transporte y que se extiende, esencialmente, en la dirección longitudinal de la pinza y en una dirección transversal. Sobre este dispositivo de transporte, el cual durante el funcionamiento está orientado generalmente esencialmente de forma horizontal, se apoya el artículo que se debe transportar durante el transporte mediante la pinza de robot. Una pinza de robot genérica presenta además un dispositivo de desplazamiento, el cual está dispuesto en una dirección vertical de la pinza por encima del dispositivo portador y que sirve para la carga con fuerza del artículo que se debe transportar en la dirección longitudinal de la pinza.
La pinza de robot genérica permite retirar, mediante el dispositivo de desplazamiento, un artículo que se debe transportar que se apoya sobre la superficie de apoyo del dispositivo de transporte de éste, debido a que tiene lugar un movimiento relativo entre el dispositivo portador y el dispositivo de desplazamiento en la dirección longitudinal de la pinza, mediante el cual el artículo que se debe transportar es desplazado fuera de la superficie de apoyo y de este modo puede ser situado, por ejemplo, sobre un fondo, en particular por ejemplo de un contenedor de carga.
En la concepción de una pinza de robot genérica existe el problema de que para el alojamiento y el depósito de bultos usuales la superficie de apoyo tiene que presentar una longitud notable en la dirección longitudinal de la pinza, preferentemente una longitud de más de 40 cm. Para poder retirar el artículo que se debe transportar de forma fiable de la superficie de apoyo debe ser por lo tanto similar la posibilidad de desplazamiento relativo entre el dispositivo de desplazamiento y el dispositivo portador. Para poder conseguirlo en el caso de una pinza de robot comparativamente pequeña y ligera es necesario, o bien desplazar partes de los mecanismos de accionamiento para el movimiento relativo del dispositivo de desplazamiento y del dispositivo portador, por lo menos por fases, en la dirección longitudinal de la pinza hasta detrás del dispositivo de acoplamiento, de manera que cabría temer allí una colisión con el brazo de robot, o se puede utilizar un mecanismo telescópico como, por ejemplo, un husillo telescópico o un dispositivo portador telescópico. Estos son, sin embargo, bastante costosos y/o propensos a las averías. Además, para una resistencia suficiente, los dispositivos telescópicos de este tipo son con frecuencia comparativamente pesados.
Problema que se plantea y solución La invención se plantea por ello el problema de perfeccionar una pinza de robot genérica para que ésta permita, con una estructura sencilla y lo más ligera posible, la necesaria posibilidad de desplazamiento relativo entre el dispositivo de desplazamiento y el dispositivo portador.
Esto se consigue según la invención gracias a que el dispositivo de desplazamiento y el dispositivo portador están formados para ser desplazados, al mismo tiempo sin sentido contrario, con respecto a la base de la pinza, para lo cual está prevista una transmisión mediante la cual se da lugar a un acoplamiento mecánico forzado entre el movimiento del dispositivo de desplazamiento con respecto a la base de la pinza, por un lado, y del dispositivo portador que se mueve con respecto a la base de pinza, por el otro.
Esta estructuración permite mantener pequeña la movilidad máxima correspondiente con respecto a la base de la pinza, dado que la posibilidad de desplazamiento relativo máximo del dispositivo portador y del dispositivo de desplazamiento, uno respecto del otro, resulta, por un lado, de la suma de la posibilidad de desplazamiento del dispositivo portador y, por el otro, del dispositivo de desplazamiento con respecto a la base de la pinza. Por consiguiente se puede conseguir una pinza de robot compacta, cuyos componentes parciales deben ser desplazables, en una medida comparativamente pequeña, con respecto a la base de la pinza. Preferentemente, el dispositivo portador y el dispositivo de desplazamiento se pueden desplazar aproximadamente igual de lejos con respecto a la base de la pinza, con el fin de conseguir una estructura especialmente compacta de la pinza de robot. Una relación de la posibilidad de desplazamiento de 2:1 se considera todavía también como muy ventajosa.
El dispositivo de desplazamiento y el dispositivo portador limitan conjuntamente la zona de alojamiento para el artículo que se debe transportar que es conducido por ambos, limitando el dispositivo de desplazamiento la zona de alojamiento en la dirección longitudinal de la pinza hacia atrás y el dispositivo portador la zona de alojamiento por el lado inferior. La parte de la zona de alojamiento aprovechable para el artículo que se debe transportar apoyado es determinada, por consiguiente, por la posición del dispositivo portador y la posición del dispositivo de desplazamiento, permitiendo la interacción según la invención una reducción de esta zona aprovechable a un mínimo.
En la pinza según la invención no se dan, preferentemente, ningún tipo de secciones parciales, las cuales se extiendan por encima del dispositivo de desplazamiento hasta esta zona de alojamiento, de manera que un artículo que se debe transportar no está limitado en lo que se refiere a su altura.
El dispositivo de desplazamiento de una pinza de robot genérica, la cual está prevista en una posición normal por encima del dispositivo portador, forma una especie de corredera, la cual puede cargar el artículo que se debe transportar lateralmente con fuerza, para desplazarlo fuera del dispositivo portador. Puede estar previsto también adicionalmente que el dispositivo de desplazamiento esté formado para cargar el artículo que se debe transportar, que se apoya sobre el dispositivo portador, por ejemplo mediante depresión o mediante fuerza magnética, con una fuerza que actúa en la dirección del dispositivo de desplazamiento, en particular para poder cogerlo mejor de un fondo y/o para poder fijarlo de manera adicional sobre el dispositivo portador.
Una zona de contacto en el extremo distal, en la dirección de la pinza, del dispositivo de desplazamiento, que entra en contacto, según lo determinado, con el artículo que se debe transportar, puede ser parte de un dispositivo de desplazamiento en sí rígido. La zona de contacto puede presentar, sin embargo, de manera adicional a la desplazabilidad en la dirección longitudinal de la pinza con respecto a la base de la pinza, también grados de libertad adicionales. En particular la zona de contacto puede estar articulada alrededor de un eje de giro que se extiende en la dirección transversal de la pinza en una sección principal del dispositivo de desplazamiento que se puede desplazar únicamente en la dirección longitudinal de la pinza.
El dispositivo portador pone a disposición la superficie de apoyo para el artículo que se debe transportar. Preferentemente no se da una movilidad relativa de diferentes secciones de la superficie de apoyo unas respecto de otras, en particular ninguna posibilidad de movimiento telescópico en la dirección longitudinal de la pinza. La superficie de apoyo es, en lugar de ello, preferentemente por completo o ampliamente plana y puede ser movida únicamente como un todo, con el fin de permitir un alojamiento y un depósito sin problemas del artículo que se debe transportar. Puede ser especialmente ventajoso que el dispositivo portador presente varias púas portadoras que se extienden en la dirección longitudinal de la pinza y que están distanciadas entre sí en la dirección transversal de la pinza.
En el contexto de la presente memoria deben entenderse los siguientes conceptos como se explica a continuación. La “dirección vertical de la pinza” está definida por la normal a la superficie sobre la superficie de apoyo del dispositivo portador. La “dirección longitudinal de la pinza” se extiende de forma ortogonal con respecto a la dirección vertical de la pinza en la dirección en la cual el dispositivo portador y el dispositivo de desplazamiento se pueden mover uno contra... [Seguir leyendo]
Reivindicaciones:
1. Pinza de robot (20) para asir, transportar y depositar artículos que se deben transportar (60) , en particular bultos de equipaje tales como maletas y bolsas de viaje, con -una base de pinza (30) con un dispositivo de acoplamiento (32) para la fijación a un brazo de robot (10) ,
-un dispositivo portador (40) , que se extiende en una dirección longitudinal de la pinza (2) , con una superficie de apoyo (44) , que sirve para el apoyo del artículo que se debe transportar (60) y que se extiende 10 esencialmente en la dirección longitudinal de la pinza (2) y en una dirección transversal de la pinza (3) ,
-un dispositivo de desplazamiento (50) , el cual está dispuesto en una dirección vertical de la pinza (1) por encima del dispositivo portador (40) y que sirve para aplicar una fuerza sobre el artículo que se debe transportar (60) en la dirección longitudinal de la pinza (2) ,
- pudiendo desplazarse el dispositivo de desplazamiento (50) y el dispositivo portador (40) en cada caso en la dirección longitudinal de la pinza (2) con respecto a la base de la pinza (30) ,
caracterizada porque 20
-el dispositivo de desplazamiento (50) y el dispositivo portador (40) están concebidos para ser desplazados, simultáneamente y en sentido contrario, con respecto a la base de la pinza (30) , estando prevista para ello una transmisión (36) , mediante la cual se da lugar a un acoplamiento mecánico forzado entre el movimiento del dispositivo de desplazamiento (50) con respecto a la base de la pinza (30) , por un lado, y el movimiento
del dispositivo portador (40) con respecto a la base de pinza (30) , por el otro.
2. Pinza de robot según la reivindicación 1, caracterizada porque la transmisión (36) presenta en cada caso por lo menos una rueda de accionamiento (34b, 34a) para el dispositivo de desplazamiento (50) y el dispositivo portador (40) , estando las dos ruedas de accionamiento (34a, 34b) acopladas entre sí mediante un accionamiento por correa (36) y/o mediante un motor de accionamiento (38) .
3. Pinza de robot según la reivindicación 1 o 2, caracterizada porque el dispositivo de desplazamiento (50) y el dispositivo portador (40) están desplazados en la medida en que, en una primera posición extrema relativa, un extremo distal del dispositivo portador (50) está dispuesto en la dirección longitudinal de la pinza (2) a no más de 15
cm delante de un extremo distal del dispositivo de desplazamiento, estando preferentemente en esta primera posición extrema relativa desplazados el dispositivo de desplazamiento y el dispositivo portador en la medida en que el extremo distal del dispositivo de desplazamiento sobresale, en la dirección longitudinal de la pinza, del extremo distal del dispositivo portador.
4. Sistema de robot, en particular para asir, transportar y depositar artículos que se deben transportar (60) , en particular bultos de equipaje tales como maletas y bolsas de viaje, con
- una base de robot (8) dispuesta de manera fija o que se puede desplazar mediante un sistema de carriles,
-un brazo de robot (10) que se puede mover con respecto a la base de robot (8) , en cuyo extremo está previsto un dispositivo de acoplamiento para el acoplamiento de una pinza de robot (20) , y
- un aparato de control para el control del brazo de robot (10) y de la pinza de robot (20) ,
caracterizado porque
- en el dispositivo de acoplamiento del brazo de robot (10) está fijada una pinza de robot (20) según una de las reivindicaciones anteriores.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]