Pieza de robot y método para proteger una pieza de robot.
Estructura de absorción de choques para una pieza de un robot industrial caracterizada por que la estructura de absorción de choques incluye una cubierta (3) dispuesta para rodear la pieza de robot (1,
2) y al menos dos elementos de separación (6, 8) sobre los que está montada la cubierta (3) de tal manera que un espacio intermedio está formado entre la cubierta (3) y la pieza de robot (1, 2), y porque al menos uno de los elementos de separación (6, 8) soporta elásticamente la cubierta (3).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/063922.
Solicitante: ABB RESEARCH LTD..
Nacionalidad solicitante: Suiza.
Dirección: AFFOLTERNSTRASSE 44 8050 ZURICH SUIZA.
Inventor/es: LUNDBERG,IVAN, SIRKETT,DANIEL, VITTOR,TIMOTHY.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J19/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
PDF original: ES-2511869_T3.pdf
Fragmento de la descripción:
Pieza de robot y método para proteger una pieza de robot
Campo de la invención La presente invención en un primer aspecto se refiere a una pieza de robot, tal como un brazo de robot o 5 a una articulación de robot, que incluye una estructura de absorción de choques que rodea la pieza de robot.
En un segundo aspecto, la invención se refiere a un método para proteger una pieza de robot rodeando la pieza de robot con una estructura de absorción de choques.
Antecedentes de la invención Los robots industriales a menudo funcionan en un entorno en el que el robot podría entrar en contacto involuntariamente con otro objeto, por ejemplo seres humanos que trabajan en la misma celda, otros robots, otras máquinas u objetos mecanizados sobre los que se realiza el trabajo. Esto implica el riesgo de que el mismo robot o el objeto con el que choca podría dañarse o una persona podría ser lesionada. Una gran parte de estos riesgos se puede evitar con medidas logísticas, sin embargo, no siempre al 100%. Existe por tanto la necesidad de proporcionar algún tipo de protección a esas piezas de robot para las que existe el riesgo de colisión, en particular, codos y similares donde hay articulaciones entre los brazos del robot. Se conoce así aplicar una estructura de absorción de choques que rodea dichas piezas de robot. También se conoce proporcionar piezas de robot con una cubierta protectora a fin de evitar que los componentes relacionados con el robot se vean afectados por la contaminación de la atmósfera que rodea el robot, por ejemplo, evitar que los cables se vean afectados por neblina de pintura o similares.
Ejemplos de estructuras de protección que protegen de choques y / o de contaminación pueden encontrarse en los documento US 5732599, EP 0988939, JP 5023992, US 20050103147 y US 7.069.664.
Para lograr que un robot industrial que funciona al lado de trabajadores humanos sea intrínsecamente seguro, las piezas estructurales del robot están encerradas en un material de absorción de choques.
Otro requisito en términos de seguridad es que el cableado en el brazo de robot tiene que ser ocultado con el fin de evitar accidentes por entrelazamiento. En disposiciones en las que no se emplean trenes de transmisión de eje hueco, la presión del acolchado en el exterior de la estructura de robot tiene problemas con el movimiento libre de los cables. Estos problemas pueden resolverse mediante la introducción de un volumen de espacio libre en el que el cable se puede mover entre los componentes de articulación giratorios y el acolchado. Sin embargo, esto aumenta las dimensiones externas del brazo afectando a sus condiciones de funcionamiento.
También puede haber otras razones que deriven en una necesidad de un espacio libre entre la pieza de robot y el acolchado de protección circundante.
Resumen de la invención El objeto de la presente invención es mejorar una estructura de absorción de choques protectora de una pieza de robot que incluye una estructura de este tipo.
En particular, el objeto es satisfacer la necesidad de lograr un espacio libre entre la pieza de robot y la estructura de absorción de choques sin los inconvenientes que normalmente supone una construcción de este tipo.
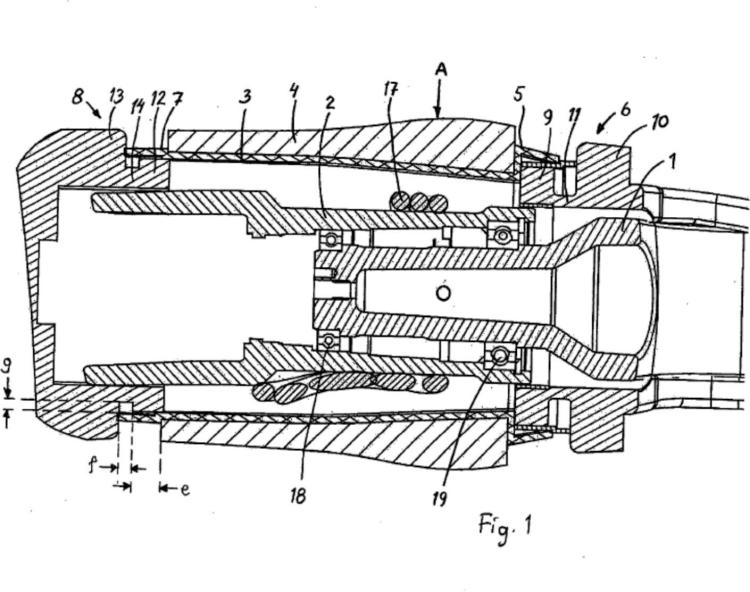
Este objeto de acuerdo con el primer aspecto de la invención, se consigue porque una pieza de robot del tipo especificado al inicio incluye las características específicas de que la estructura de absorción de choques incluye una cubierta que rodea la pieza de robot y al menos dos elementos de separación en los que se monta la cubierta de tal manera que se forma un espacio intermedio entre la cubierta y la pieza de robot y porque al menos uno de los elementos de separación soporta elásticamente la cubierta.
Al montarse elásticamente la cubierta, la energía desarrollada a partir de un choque en la cubierta es absorbida por el elemento de separación que soporta elásticamente la cubierta. De esta manera, la cubierta puede estar provista de una capa de material acolchado mucho más delgada que sin este montaje elástico. Con una elasticidad suficiente del montaje, se puede excluir completamente cualquier capa de material acolchado sobre la cubierta.
De este modo, la dimensión de la estructura de absorción de choques se reducirá sustancialmente en comparación con una estructura sin tal montaje elástico, en la que la energía de choque completa tiene que ser absorbida por un acolchado circundante. Así, mediante la invención se consigue que se cree un
espacio libre entre la estructura de absorción de choques y la pieza de robot manteniendo al mismo tiempo la absorción de choques requerida sin aumentar sustancialmente las dimensiones externas de la estructura.
De acuerdo con una realización preferida, ambos elementos de separación soportan elásticamente la cubierta.
Las ventajas mencionadas anteriormente obtenidas por la invención se acentúan más con esta realización ya que el montaje elástico de la cubierta es más completo y homogéneo. Por tanto, el efecto de choque será más independiente con respecto a la ubicación del choque en la cubierta. De manera preferible, la cubierta se monta teniendo cada uno de sus extremos los elementos de separación elásticos.
Según otra realización preferida, al menos uno de dichos elementos de separación está hecho al menos en parte de material acolchado.
Esta es una manera muy simple y fiable de obtener el montaje elástico.
Según otra realización preferida, al menos uno de los elementos de separación incluye una primera sección conectada a la cubierta, una segunda sección conectada a la pieza de robot y una sección intermedia que conecta las secciones primera y segunda, teniendo la sección intermedia una flexibilidad mayor que cada una de las secciones primera y segunda.
Al proporcionarse una sección intermedia con una mayor flexibilidad que el resto del elemento de separación, la elasticidad del montaje puede incrementarse aún más.
De manera preferible, la sección intermedia tiene dimensiones más pequeñas en al menos una dirección que las secciones primera y segunda.
De acuerdo con otra realización preferida, el elemento de separación tiene una forma generalmente anular que define un eje, por lo que las secciones primera y segunda están separadas axialmente por la sección intermedia y la sección intermedia tiene un grosor radial menor que el de las secciones primera y segunda.
De este modo, se forma una parte central delgada, que por el diseño de su construcción es una forma sencilla de aumentar la flexibilidad en la parte intermedia para aumentar la elasticidad del soporte.
La disposición proporciona de este modo una absorción de choques equivalente a un espesor completo de acolchado, conservando al mismo tiempo un espacio vacío oculto, por ejemplo, para que se muevan libremente los cables.
De acuerdo con otra realización preferida, la pieza de robot incluye una articulación entre unos componentes de robot primero y segundo que pueden girar uno con respecto al otro, y un primero de los elementos de separación se une al primer componente y un segundo de los elementos de separación se une al segundo componente.
La necesidad de un espacio libre dentro de la estructura de absorción de choques está particularmente presente cuando la pieza de robot es una articulación giratoria. Por lo tanto, esta realización representa una aplicación importante de la invención.
Según otra realización preferida, el primer elemento de separación está provisto de un manguito de cojinete exterior e interior, estando la cubierta articulada sobre el manguito de cojinete exterior y estando el manguito de cojinete interior articulado sobre el segundo componente.
Esto resuelve de una manera ventajosa la necesidad de disponer una rotación correspondiente entre la cubierta y uno de los elementos de separación. La articulación sobre el segundo componente estabiliza una alineación correcta entre las unidades que cooperan para formar la protección de la articulación.
De acuerdo con otra realización preferida, la cubierta está formada al menos parcialmente de material plástico.
Cuando se utiliza material plástico para la cubierta, es posible encontrar un material que sea semirrígido a un nivel adecuado. De este modo, la propia cubierta va a absorber la energía de choque hasta cierto punto mediante un cierto grado de deformación. El material semirrígido también es ventajoso para lograr un desplazamiento del cuerpo de la misma que se transfiera a los elementos de separación.
De acuerdo con otra realización preferida, la cubierta está provista de un revestimiento de material acolchado... [Seguir leyendo]
Reivindicaciones:
1. Estructura de absorción de choques para una pieza de un robot industrial caracterizada por que la estructura de absorción de choques incluye una cubierta (3) dispuesta para rodear la pieza de robot (1, 2) y al menos dos elementos de separación (6, 8) sobre los que está montada la cubierta (3) de tal manera que un espacio intermedio está formado entre la cubierta (3) y la pieza de robot (1, 2) , y porque al menos uno de los elementos de separación (6, 8) soporta elásticamente la cubierta (3) .
2. Estructura de absorción de choques de acuerdo con la reivindicación 1, caracterizada por que ambos de los al menos mencionados dos elementos de separación (6, 8) soportan elásticamente la cubierta (3) .
3. Estructura de absorción de choques de acuerdo con la reivindicación 1 o 2, caracterizada por que al menos uno de dichos elementos de separación (6, 8) está al menos en parte hecho de material acolchado.
4. Estructura de absorción de choques de acuerdo con cualquiera de las reivindicaciones 1 a 3, caracterizada por que al menos uno de dichos elementos de separación (6, 8) incluye una primera sección (9, 12) conectada a la cubierta (3) , una segunda sección (10, 13) adaptada para ser conectada a la pieza de robot (1, 2) y una sección intermedia (11, 14) que conecta las secciones primera (9, 12) y segunda (10, 13) , teniendo la sección intermedia (11, 14) una flexibilidad mayor que cada una de las secciones primera (8, 12) y segunda (10, 13) .
5. Estructura de absorción de choques de acuerdo con la reivindicación 4, caracterizada por que el elemento de separación (6, 8) tiene forma generalmente anular que define un eje, por lo que las secciones primera (9, 12) y segunda (10, 13) están separadas axialmente por la sección intermedia (11, 14) y la sección intermedia (11, 14) tiene un grosor radial más pequeño que el de las secciones primera (9, 12) y segunda (10, 13) .
6. Estructura de absorción de choques de acuerdo con cualquiera de las reivindicaciones 1 a 5, caracterizada por que la cubierta (3) está formada al menos parcialmente de material plástico.
7. Estructura de absorción de choques de acuerdo con cualquiera de las reivindicaciones 1 a 6, caracterizada por que la cubierta (3) está provista de un revestimiento de material acolchado (4) fijado al exterior de la cubierta (3) .
8. Conjunto de pieza de robot que incluye una pieza de robot (1, 2) , tal como un brazo de robot o una articulación de robot, y una estructura de absorción de choques que rodea la pieza de robot, caracterizado por que la estructura de absorción de choques incluye las características de la estructura de absorción de choques que se especifican en cualquiera de las reivindicaciones 1 a 7.
9. Conjunto de pieza de robot de acuerdo con la reivindicación 8, caracterizado por que la pieza de robot (1, 2) incluye una articulación entre unos componentes de robot primero (1) y segundo (2) que pueden girar uno con respecto al otro y por que un primero (6) de dichos elementos de separación está fijado al primer componente de robot (1) y un segundo (8) de dichos elementos de separación está fijado al segundo componente de robot (2) .
10. Conjunto de pieza de robot de acuerdo con la reivindicación 9, caracterizado por que el primer elemento de separación (6) está provisto de unos manguitos de cojinete exterior (15) e interior (16) , estando la cubierta (3) articulada sobre el manguito de cojinete exterior (15) y estando el manguito interior
(16) articulado sobre el segundo componente de robot (2) .
11. Conjunto de pieza de robot de acuerdo con cualquiera de las reivindicaciones 8 a 10, caracterizado por que al menos un cable (17) está situado en dicho espacio intermedio.
12. Conjunto de pieza de robot de acuerdo con la reivindicación 11, caracterizado por que al menos una parte del espacio intermedio tiene una distancia entre la pieza de robot (1, 2) y la cubierta (3) que está en el intervalo de entre 1, 1 y 1, 5 veces el diámetro del cable (17) .
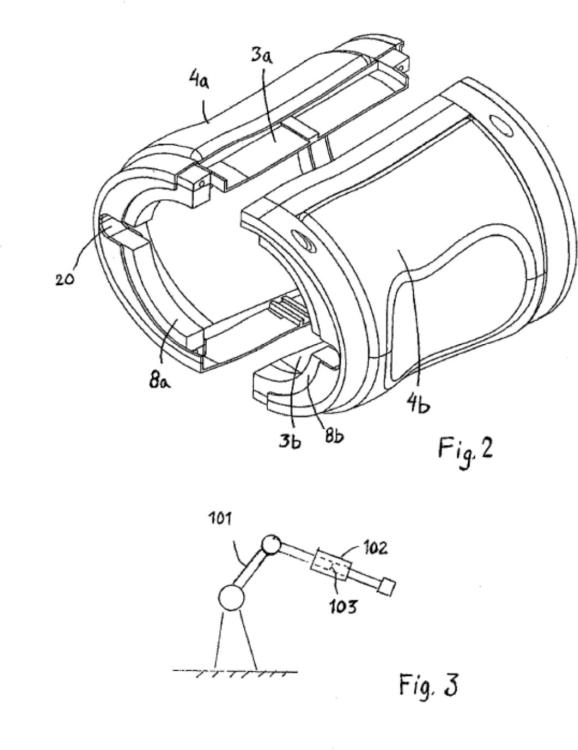
13. Robot industrial (101) , caracterizado por que el robot industrial comprende un conjunto de pieza de robot de acuerdo con cualquiera de las reivindicaciones 8 a 12.
14. Método para proteger una pieza de robot rodeando la pieza de robot con una estructura de absorción de choques, incluyendo el método las etapas de montar al menos dos elementos de separación sobre la pieza de robot, montar una cubierta sobre dichos elementos de separación de manera que se forme un espacio intermedio entre la cubierta y la pieza de robot, con lo cual la cubierta se monta elásticamente sobre al menos uno de los elementos de separación.
15. Método de acuerdo con la reivindicación 14, caracterizado por que el método se realiza de tal manera que su estructura de absorción de choques tendrá las características especificadas para la estructura de absorción de choques de acuerdo con cualquiera de las reivindicaciones 1 a 7.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
Sistema de carga eléctrica para un robot, del 18 de Marzo de 2020, de Locus Robotics Corp: Un sistema de carga eléctrica, que comprende: un conjunto de cargador eléctrico, incluyendo: una base del cargador a acoplarse a una fuente de energía eléctrica; […]