Sistema de perturbación del equilibrio y entrenador.
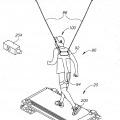
Aparato (20) para el ejercicio del control del equilibrio de una persona,
comprendiendo el aparato (20):
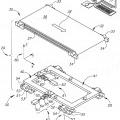
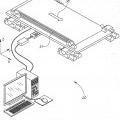
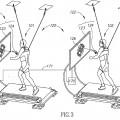
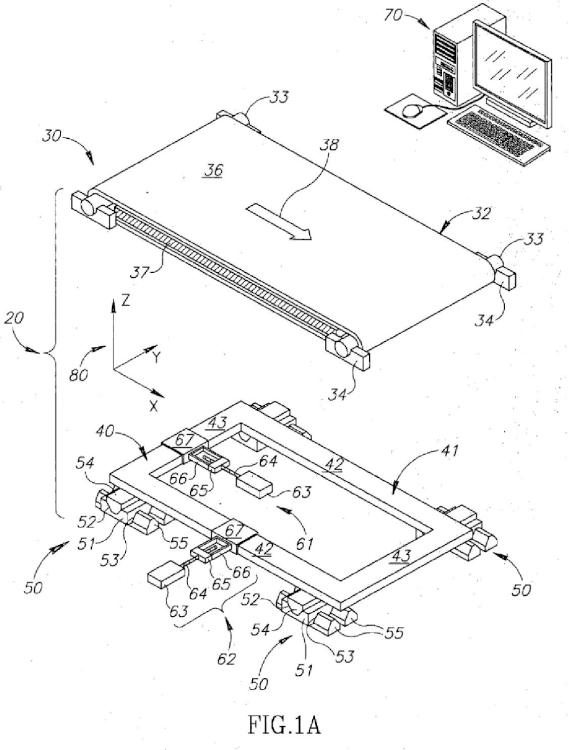
una plataforma de movimiento (40) operable para desplazar un objeto montado en la misma;
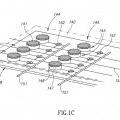
una cinta de correr (30) montada en la plataforma y que comprende una correa (32) que tiene una superficie de pista (36) en la que una persona que usa la cinta de correr está de pie, camina y/o corre; caracterizado por al menos un sensor (200, 202) adaptado para generar señales utilizables para determinar una medida de la habilidad del control del equilibrio de la persona; y
un controlador (70, 170) adaptado para recibir las señales y procesarlas para proporcionar una medida de la habilidad del control del equilibrio de la persona y para controlar la plataforma de movimiento (40) para proporcionar un desplazamiento de la cinta de correr (30) y así de la superficie de la pista (36) en respuesta a la medida.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2010/052079.
Solicitante: BEN-GURION UNIVERSITY OF THE NEGEV RESEARCH AND DEVELOPMENT AUTHORITY.
Nacionalidad solicitante: Israel.
Dirección: P. O. Box 653 84105 Beer-Sheva ISRAEL.
Inventor/es: SHAPIRO,AMIR, MELZER,ITSHAK, ENTIS,ALLAN C.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A63B22/02 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › A63B 22/00 Aparatos de ejercicio especialmente adaptados al entrenamiento del sistema cardiovascular, para ejercitar la agilidad o la coordinación de los movimientos (aspectos de resistencia A63B 21/00; controles eléctricos o electrónicos correspondientes A63B 24/00). › con esteras rodantes sin fin.
- A63B26/00 A63B […] › Aparatos de ejercicio no cubiertos por los grupos A63B 1/00 - A63B 25/00.
PDF original: ES-2553111_T3.pdf
Patentes similares o relacionadas:
Máquina de ejercicio con simulación de rodamiento de carga, del 12 de Febrero de 2020, de Sisyphus Fitness Inc: Máquina de ejercicios con simulación de empuje de carga que comprende una pista en movimiento continuo montada en un par de cilindros , en la que el extremo delantero […]
SISTEMA ENTRENADOR DE MARCHA, del 23 de Enero de 2020, de UNIVERSIDAD AUTONOMA DE BUCARAMANGA UNAB: La presente invención pertenece al campo de aparatos de ejercicio especialmente adaptados a partes determinadas del cuerpo específicamente […]
MÁQUINA PARA ENTRENAMIENTO CON CINTA RODANTE DE USO PLURAL, del 20 de Noviembre de 2019, de RODRIGUEZ EL FETOUH, Eduard: 1. Máquina para entrenamiento con cinta rodante de uso plural, que comprendiendo, ensamblada en una estructura de soporte, una cinta rodante que gira acoplada entre, […]
Una estructura de placa amortiguadora de una banda caminadora, del 20 de Noviembre de 2019, de CHANG, Chung-fu: Una estructura de la placa amortiguadora para una banda caminadora que puede instalarse bajo una correa de dicha banda caminadora y que puede […]
Cámara de presión y elevador para sistema de presión de aire diferencial con capacidad de recogida de datos médicos, del 6 de Noviembre de 2019, de Alterg, Inc: Un sistema de ejercicio de presión de aire diferencial , que comprende: un marco que soporta un dispositivo de ejercicio y un panel de control […]
Dispositivo para la práctica de actividades deportivas, del 30 de Octubre de 2019, de Habiche, Leila Benedicte: Dispositivo para la práctica de actividades deportivas configurado para estar asociado a una máquina de ejercicios físicos , comprendiendo el citado dispositivo […]
Máquina de caminar con acupresión que aplica presión a las zonas reflejas del pie, del 23 de Octubre de 2019, de SHIN, HYUN-OH: Una cinta ergométrica para estimular las zonas reflejas del pie, comprendiendo la cinta ergométrica : los rodillos anterior y posterior montados en un […]
Cinta de andar curvada, del 21 de Octubre de 2019, de TECHNOGYM S.P.A.: Cinta de andar curvada, que comprende: una base extendida a lo largo de un eje (L) longitudinal, comprendiendo la base : - un primer […]