Pala de ala rotatoria, rotor que comprende al menos dos de tales palas y procedimiento de puesta en práctica de dicho rotor.
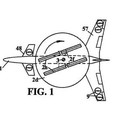
Pala (P) de un ala rotatoria alrededor del cubo (M) de un rotor (RO) de frecuencia de rotación (Ω
), comprendiendo la citada pala (P), cuyo acimut de rotación es conocido, de envergadura (E), una parte (B) de fijación al citado cubo (M) y una parte aerodinámica (A), y teniendo diferentes modos de deformación especialmente un modo de torsión alrededor de su envergadura (E) de frecuencia propia función de su rigidez de torsión alrededor de la citada envergadura (E), comprendiendo la citada pala
medios de torsión dinámica (17), aproximadamente
alrededor de su envergadura (E), que pueden ser accionados en tiempo real, es decir durante su rotación alrededor del citado cubo, al menos a la frecuencia de rotación (Ω) del citado rotor y en sincronismo con el acimut de rotación e la citada pala, de modo que estos medios de torsión dinámica (17) pueden generar un paso cíclico incluso en ausencia de plato cíclico;
caracterizada por que
- su rigidez, aparente bajo fuerza centrífuga, de torsión aproximadamente alrededor de su envergadura (E), es suficientemente baja para permitir, a los citados medios de torsión dinámica (17), obtener, en el plano de la sección recta de la extremidad libre de la citada pala, un ángulo de torsión dinámica elástica (v) de la cuerda de al menos 14º en picado o en encabritamiento, al tiempo que permanece suficientemente elevada para que la frecuencia propia de torsión de la pala alrededor de su envergadura sea igual a la frecuencia de rotación (Ω) del citado rotor, de modo que permita una torsión dinámica de la pala por resonancia de torsión y por tanto minimizar la energía necesaria para la generación del paso cíclico;
- su factor de amortiguamiento, bajo fuerza centrífuga, es estrictamente positivo, a fin de evitar la divergencia de resonancia de los diferentes modos.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12164012.
Solicitante: ONERA (OFFICE NATIONAL D'ETUDES ET DE RECHERCHES AEROSPATIALES).
Nacionalidad solicitante: Francia.
Dirección: 29, AVENUE DE LA DIVISION-LECLERC B.P. 72 92322 CHATILLON CEDEX FRANCIA.
Inventor/es: LECONTE, PHILIPPE, MERCIER DES ROCHETTES,HUGUES, BUCHANIEK,LEON, JOLY,DIDIER, DUPAS,JACQUES.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C27/473 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 27/00 Giroaviones; Sus rotores específicos (dispositivos de aterrizaje B64C 25/00). › Características estructurales.
- B64C27/72 B64C 27/00 […] › Medios de actuación sobre palas.
PDF original: ES-2522560_T3.pdf
Fragmento de la descripción:
Pala de ala rotatoria, rotor que comprende al menos dos de tales palas y procedimiento de puesta en práctica de dicho rotor La presente invención concierne a los rotores de ala rotatoria especialmente para helicópteros, así como a las palas de tales rotores.
Se sabe que las palas de un rotor de ala rotatoria de helicóptero son mandadas en paso colectivo y en paso cíclico.
El paso colectivo permite el vuelo estacionario del helicóptero por un posicionamiento idéntico en incidencia de todas las palas con respecto al eje de rotación del citado rotor, entonces confundido con el eje de arrastre del mástil de éste, generando el paso colectivo una sustentación general que está alineada con la vertical y que equilibra la masa del helicóptero.
El paso cíclico a su vez permite, por un posicionamiento en incidencia de cada pala en función del acimut, inclinar la sustentación general con respecto a la vertical y por tanto mover el citado helicóptero.
Para el mando en paso colectivo y en paso cíclico, los rotores comprenden generalmente un mecanismo, denominado plato cíclico, montado en el mástil del rotor y que comprende un plato giratorio unido a cada pala por una biela de paso y arrastrado en rotación por un compás móvil, un plato fijo deslizante a lo largo del mástil del rotor e inclinable con respecto a éste y una unión de rodamiento entre los citados platos fijo y giratorio.
Dicho plato cíclico presenta el inconveniente de comprender un número importante de piezas mecánicas que necesitan un mantenimiento y un control regulares.
Se ha previsto por tanto suprimir el citado plato cíclico montando alerones móviles en las citadas palas, siendo mandado el plato cíclico de éstas por la torsión de las citadas palas generada por el momento de torsión inducido por el giro de los citados alerones y siendo obtenido el paso colectivo de las palas de manera semejante a la de las hélices, o bien por un actuador dispuesto en el pie de la pala.
Sin embargo, tales alerones móviles necesitan igualmente la utilización de conjuntos mecánicos complicados y sometidos a rozamiento.
La presente invención comprende una pala de ala rotatoria, un rotor, especialmente para helicóptero, que no comprende plato cíclico y un procedimiento de puesta en práctica que remedia los citados inconvenientes de la técnica anterior.
La pala, de acuerdo con la invención, de un ala rotatoria alrededor del cubo de un rotor de frecuencia de rotación, comprendiendo la citada pala, cuyo acimut de rotación es conocido, de envergadura E, una parte de fijación al citado cubo y una parte aerodinámica, y teniendo diferentes modos de deformación especialmente un modo de torsión alrededor de su envergadura (E) de frecuencia propia función de su rigidez de torsión alrededor de la citada envergadura (E) , caracterizada por que:
- comprende medios de torsión dinámica, aproximadamente alrededor de su envergadura, que pueden ser accionados en tiempo real, es decir durante su rotación alrededor del citado cubo, al menos a la frecuencia de rotación del citado rotor y en sincronismo con el acimut de rotación de la citada pala, de modo que estos medios de torsión dinámica puedan generar un paso cíclico incluso en ausencia de plato cíclico;
- su rigidez, aparente bajo fuerza centrífuga, de torsión aproximadamente alrededor de su envergadura, es suficientemente baja para permitir, a los citados medios de torsión dinámica, obtener, en el plano de la sección recta de la extremidad libre de la citada pala, un ángulo de torsión dinámica elástica (v) de la cuerda de al menos 14º en picado o en encabritamiento, al tiempo que permanece suficientemente elevada para que la frecuencia propia de torsión de la pala, alrededor de su envergadura, sea igual a la frecuencia de rotación del citado rotor, de modo que permita una torsión dinámica de la pala por resonancia de torsión y por tanto minimizar la energía necesaria para la generación del paso cíclico;
- su factor de amortiguamiento, bajo fuerza centrífuga, es estrictamente positivo, a fin de evitar la divergencia de resonancia de los diferentes modos.
Se recuerda que el especialista en la materia conoce bien que para obtener un ángulo de torsión de amplitud dada de una pieza mecánica, éste dispone de un método que es ajustar la potencia de los actuadores de torsión y de un segundo método que es ajustar la rigidez de la citada pieza mecánica. La solución retenida en la invención es combinar estos dos métodos utilizando una pala menos rígida en torsión que en el estado de la técnica a fin de limitar el peso de los actuadores al tiempo que se disponga de una amplitud de torsión de al menos 14º en encabritamiento o en picado para realizar un paso cíclico. En el estado de la técnica se conocen diferentes medios de disminuir la rigidez de torsión de una pieza mecánica como una pala: es posible ranurar longitudinalmente la
envuelta de la pala (como en la solicitud de patente del mismo autor, publicada con el nº FR 2924681) o utilizar materiales estructurales, de relleno o de revestimiento, de menor rigidez en torsión.
Se recuerda igualmente que el especialista en la materia conoce, como cualquier mecánico, diferentes medios de obtener un factor de amortiguamiento de pala estrictamente positivo. Se conoce por ejemplo el método pasivo que consiste en añadir a la estructura de la pala un material de factor de amortiguamiento superior al 10%, como por ejemplo topes de caucho en el pie de la pala; o también el método activo de control activo de vibraciones.
Por otra parte, se precisa que los materiales y la estructura de la pala son elegidos para poder soportar torsiones de amplitud de al menos 14º en picado o en encabritamiento y repetidas a frecuencias que pueden ser hasta varias veces la frecuencia de rotación máxima del rotor (caso del mando multicíclico de la torsión para realizar control activo de las vibraciones) al tiempo que permanece en su ámbito de deformación elástica.
Así, gracias a la presente invención, se obtiene un rotor de ala rotatoria, especialmente de helicóptero, fácil de mandar en paso cíclico y con una baja energía, que permite la supresión del plato cíclico, al tiempo que se evita cualquier acoplamiento entre los modos de oscilación y de torsión.
Deberá observarse que la flexibilidad de la pala puede provenir de la correspondiente a la fijación, de la correspondiente a la parte aerodinámica, o bien de las dos. Por ejemplo, cuando, de modo conocido, cada una de las palas está constituida en su mayor parte por una parte aerodinámica (aquélla cuya variación de paso es aerodinámicamente activa) unida al cubo del rotor por una parte de fijación más corta, la frecuencia propia de torsión de la pala (en su conjunto) puede ser obtenida por la combinación de los coeficientes de rigidez de la citada parte aerodinámica y de la citada parte de fijación. Tal combinación permite ventajosamente al actuador correspondiente disponer de un intervalo angular de torsión suficiente para ser utilizado en modo multicíclico.
Ventajosamente, de acuerdo con un segundo modo de realización, la invención es una pala de acuerdo con el modo de realización precedente, caracterizada por que la citada parte de fijación presenta una rigidez aparente de torsión de 10 veces a 100 veces inferior a la de la parte aerodinámica.
Ventajosamente, de acuerdo con un tercer modo de realización, la invención es una pala de acuerdo con uno de los dos modos de realización precedentes, caracterizada por que:
- su estructura es de un material compuesto;
- su revestimiento es unidireccional y la dirección de este revestimiento forma un ángulo sensiblemente igual a 0º
con la envergadura de la citada pala, de modo que se obtenga una rigidez de torsión mínima de la pala alrededor de la envergadura.
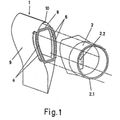
Ventajosamente, de acuerdo con un cuarto modo de realización, la invención es una pala de acuerdo con uno de los tres modos de realización precedentes, caracterizada por que la parte aerodinámica está provista de una ranura longitudinal en una de sus superficies de intradós o de extradós y comprende:
â?¢ un primer larguero que el forma borde de ataque y las partes de intradós y de extradós, contiguas a este último y del cual una cara transversal longitudinal forma el borde delantero de la citada ranura.;
â?¢ un segundo larguero que está separado del citado primer larguero por la citada ranura y del cual una cara transversal longitudinal forma el borde trasero de la citada ranura;
â?¢ una envuelta que forma el intradós y el extradós de la citada pala, ranurada longitudinalmente por la citada ranura... [Seguir leyendo]
Reivindicaciones:
1. Pala (P) de un ala rotatoria alrededor del cubo (M) de un rotor (RO) de frecuencia de rotación (â) , comprendiendo la citada pala (P) , cuyo acimut de rotación es conocido, de envergadura (E) , una parte (B) de fijación al citado cubo (M) y una parte aerodinámica (A) , y teniendo diferentes modos de deformación especialmente un modo de torsión alrededor de su envergadura (E) de frecuencia propia función de su rigidez de torsión alrededor de la citada envergadura (E) , comprendiendo la citada pala medios de torsión dinámica (17) , aproximadamente alrededor de su envergadura (E) , que pueden ser accionados en tiempo real, es decir durante su rotación alrededor del citado cubo, al menos a la frecuencia de rotación (â) del citado rotor y en sincronismo con el acimut de rotación de la citada pala, de modo que estos medios de torsión dinámica (17) pueden generar un paso cíclico incluso en ausencia de plato cíclico;
caracterizada por que -su rigidez, aparente bajo fuerza centrífuga, de torsión aproximadamente alrededor de su envergadura (E) , es suficientemente baja para permitir, a los citados medios de torsión dinámica (17) , obtener, en el plano de la sección recta de la extremidad libre de la citada pala, un ángulo de torsión dinámica elástica (v) de la cuerda de al menos 14º en picado o en encabritamiento, al tiempo que permanece suficientemente elevada para que la frecuencia propia de torsión de la pala alrededor de su envergadura sea igual a la frecuencia de rotación (â) del citado rotor, de modo que permita una torsión dinámica de la pala por resonancia de torsión y por tanto minimizar la energía necesaria para la generación del paso cíclico;
- su factor de amortiguamiento, bajo fuerza centrífuga, es estrictamente positivo, a fin de evitar la divergencia de resonancia de los diferentes modos.
2. Pala de acuerdo con la reivindicación 1, caracterizada por que la citada parte de fijación (B) presenta una rigidez aparente de torsión de 10 veces a 100 veces inferior a la de la parte aerodinámica (A) .
3. Pala de acuerdo con una de las reivindicaciones 1 o 2, caracterizada por que:
- su estructura es de material compuesto;
- su revestimiento es unidireccional y la dirección de este revestimiento forma un ángulo sensiblemente igual a 0º
con la envergadura de la citada pala, de modo que se obtenga una rigidez de torsión mínima de la pala alrededor de su envergadura.
4. Pala de acuerdo con una de las reivindicaciones 1 a 3, caracterizada por que la parte aerodinámica (A) está provista de una ranura longitudinal (6) en uno de sus intradós (3) o extradós (2) y comprende:
â?¢ un primer larguero (7) que forma el borde de ataque (4) y las partes de intradós y de extradós contiguas a este último y del cual una cara transversal longitudinal forma el borde delantero (6A) de la citada ranura (6) ;
â?¢ un segundo larguero (9) que está separado del citado primer larguero (7) por la citada ranura (6) y del cual una cara transversal longitudinal forma el borde trasero (6R) de la citada ranura (6) ;
â?¢ una envuelta (11) que forma el intradós (3) y el extradós (2) de la citada pala, ranurada longitudinalmente por la citada ranura (6) y que envuelve a los citados primero y segundo largueros (7, 9) siendo solidaria de estos;
â?¢ un material (12) de relleno de la citada envuelta (11) ;
â?¢ los medios de torsión dinámica (17) comprenden un actuador de torsión dinámica apto para provocar un deslizamiento relativo, entre los bordes (6A, 6R) de la citada ranura; y
â?¢ la citada envuelta (11) está realizada en un material compuesto de fibras-resina del cual al menos la mayor parte de las fibras están dispuestas de modo que forman un ángulo sensiblemente igual a 0º con la envergadura de la citada pala.
5. Pala de acuerdo con la reivindicación 4, caracterizada por que, a una y otra parte de la citada ranura (6) , en la proximidad (14) de ésta, la citada envuelta (11) está solidarizada de modo rígido con los citados primero y segundo largueros (7, 9) y por que, fuera de la proximidad (14) de la citada ranura (6) , la citada envuelta está unida al resto de la citada pala por una unión de un material elástico de factor de amortiguamiento superior al 10%, apto para filtrar las vibraciones de la pala, como por ejemplo un elastómero, y repartido, de modo continuo o discontinuo, entre la citada envuelta y el citado resto de la pala.
6. Pala de acuerdo con una de las reivindicaciones 4 o 5, caracterizada por que el citado material de relleno (12) es una espuma de rígida a semirrígida.
7. Pala de acuerdo con una de las reivindicaciones 4 a 6, caracterizada por que comprende una banda (13) de un material elástico de factor de amortiguamiento superior al 10%, apto para filtrar la frecuencia propia de torsión de la pala, como por ejemplo un elastómero, rellenando la citada banda la ranura (6) .
8. Pala de acuerdo con una de las reivindicaciones 4 a 7, caracterizada por que el actuador de torsión dinámica (17) está dispuesto en la extremidad libre de ésta, de manera que facilita su instalación y su mantenimiento.
9. Pala de acuerdo con una de las reivindicaciones 1 a 8, caracterizada por que los medios de torsión dinámica (17) están dimensionados para permitir obtener, a las frecuencias múltiples de la frecuencia de rotación (â) del citado rotor y en sincronismo con el acimut de rotación de la citada pala, una amplitud del citado ángulo de torsión dinámica elástica (v) al menos igual, en valor absoluto, a la amplitud máxima de los diferentes modos de deformación a estas mismas frecuencias múltiples de la frecuencia de rotación (â) , de modo que se pueda realizar el control activo multicíclico de las vibraciones.
10. Pala de acuerdo con una de las reivindicaciones 1 a 9, caracterizada por que su parte de fijación (B) al cubo (M) comprende medios (25 a 31) de mando progresivo de su frecuencia propia, bajo fuerza centrífuga, de torsión alrededor de su envergadura (E) , aptos para someter, durante su rotación alrededor del citado cubo, la citada frecuencia propia de torsión sensiblemente a la frecuencia de rotación (â) del rotor.
11. Pala de acuerdo con la reivindicación 10, caracterizada por que los citados medios (25 a 31) de mando progresivo de su frecuencia propia, ajustan la citada frecuencia propia ajustando la rigidez, aparente bajo fuerza centrífuga, de torsión aproximadamente alrededor de su envergadura (E) , de su parte de fijación (B) .
12. Rotor (RO) cuya ala rotatoria en rotación alrededor de su cubo (M) a la frecuencia de rotación (â) , comprendida entre una frecuencia de rotación inferior y una frecuencia de rotación superior, comprende al menos dos palas (P) de acuerdo con una de las reivindicaciones 1 a 11, cuyos acimuts de rotación son conocidos, el citado rotor está caracterizado por que éste comprende:
º â?¢ medios de mando de los medios de torsión dinámica (17) de cada una de las citadas palas, aptos, incluso en ausencia de plato cíclico, para mandar en tiempo real, es decir a una frecuencia al menos igual a la frecuencia de rotación (â) , durante la rotación de las citadas palas y en sincronismo con su acimut de rotación, un paso cíclico para cada una de las citadas palas;
º â?¢ medios (25 a 31) de mando progresivo de la frecuencia propia, bajo la fuerza centrífuga, de torsión de cada una de las citadas palas (P) alrededor de su envergadura (E) , aptos para someter, durante esta rotación, cada citada frecuencia propia de torsión sensiblemente a la frecuencia de rotación (â) del rotor, de modo que se aproveche la resonancia de torsión alrededor de su envergadura a fin de minimizar la potencia necesaria para la generación de un paso cíclico por torsión dinámica.
13. Rotor de acuerdo con la reivindicación 12, caracterizado por que los citados medios de mando de los medios de torsión dinámica (17) son igualmente aptos, en ausencia de plato cíclico, para mandar el paso colectivo de las citadas palas durante la rotación del citado rotor.
14. Rotor de acuerdo con una de las reivindicaciones 12 o 13, caracterizado por que los citados medios (25 a 31) de mando progresivo de la frecuencia propia de torsión son aptos para ajustar, en los dos sentidos, la frecuencia propia, bajo fuerza centrífuga, de torsión, alrededor de su envergadura, de cada una de las citadas palas (P) , entre un valor mínimo correspondiente a la frecuencia de rotación inferior del rotor y un valor máximo correspondiente a la frecuencia de rotación superior del citado rotor, pudiendo ser los citados medios (25 a 31) por ejemplo medios de rigidización de la parte de fijación (B) de cada citada pala de acuerdo con una de las reivindicaciones 2 a 10 que permiten ajustar la rigidez, aparente bajo fuerza centrífuga, de torsión de cada citada pala alrededor de su envergadura, entre un valor mínimo correspondiente a la citada rigidez de cada citada pala no rigidizada por los citados medios (25 a 31) , y un valor máximo correspondiente a la citada rigidez de la parte aerodinámica (A) de cada citada pala.
15. Rotor de acuerdo con una de las reivindicaciones 12 a 14, caracterizado por que comprende medios de acción espontáneos (37) aptos para imponer a cada una de la citadas palas, en caso de fallo de los citados medios de mando (25 a 31) , que la citada frecuencia propia bajo fuerza centrífuga de torsión de cada citada pala sea igual a la frecuencia propia de torsión bajo fuerza centrífuga de su parte aerodinámica (A) , de modo que se evite cualquier divergencia de resonancia de torsión de las citadas palas.
16. Procedimiento de torsión dinámica de al menos una pala (P) de un ala rotatoria alrededor del cubo (M) de un rotor (RO) de frecuencia de rotación (â) , comprendida entre una frecuencia de rotación inferior y una frecuencia de rotación superior, comprendiendo la citada pala (P) , cuyo acimut de rotación es conocido, que tiene una envergadura (E) , una parte (B) de fijación al citado cubo (M) y una parte aerodinámica (A) y teniendo diferentes modos de
deformación especialmente un modo de torsión alrededor de su envergadura (E) de frecuencia propia función de su rigidez de torsión alrededor de la citada envergadura (E) , caracterizado por que comprende las funciones siguientes:
- mandar en tiempo real por medios de torsión dinámica (17) , es decir a una frecuencia al menos igual a la frecuencia de rotación (â) del citado rotor, durante la rotación de cada citada pala (P) y en sincronismo con el acimut de rotación de cada citada pala, el ángulo de torsión dinámica elástica (v) de la cuerda en el plano de sección recta de la extremidad libre de cada citada pala, de al menos 14º en picado o en encabritamiento, de modo que estos medios de torsión dinámica (17) puedan generar un paso cíclico incluso en ausencia de plato cíclico;
- mandar, con la ayuda de los medios (25 a 31) , la frecuencia propia, aparente bajo fuerza centrífuga, de torsión, aproximadamente alrededor de la envergadura (E) de cada citada pala (P) , de modo que ésta sea sensiblemente igual a la frecuencia de rotación (â) del citado rotor (RO) y que por consiguiente la citada torsión dinámica elástica (v) se obtenga con un mínimo de potencia por resonancia de torsión; y -filtrar las frecuencias propias de los diferentes modos de deformación de cada citada pala (P) , a fin de evitar su divergencia de resonancia.
17. Procedimiento de torsión de acuerdo con la reivindicación 16, caracterizado por que el mando de los medios de torsión dinámica (17) es multicíclico, es decir a una frecuencia múltiple de la frecuencia de rotación (â) del citado rotor (RO) , de manera que se controlen activamente los diferentes modos de deformación de las citadas palas además de mandar su paso cíclico.
18. Procedimiento de torsión de acuerdo con una de las reivindicaciones 16 o 17, caracterizado por que el mando de los medios de torsión dinámica (17) manda el paso colectivo de las citadas palas (P) además de mandar su paso cíclico.
19. Procedimiento de torsión de acuerdo con una de las reivindicaciones 16 a 18, caracterizado por que el mando de la frecuencia propia, aparente bajo fuerza centrífuga, de torsión, aproximadamente alrededor de su envergadura (E) , de cada citada pala (P) , se obtiene por el mando progresivo de la rigidez aparente bajo fuerza centrífuga, de torsión, aproximadamente alrededor de su envergadura (E) , de la parte de fijación (B) de cada citada pala (P) , pudiendo ser rigidizada la citada parte de fijación (B) , más flexible que la parte aerodinámica (A) correspondiente, hasta un valor máximo igual a la rigidez aparente de torsión, alrededor de su envergadura (E) , de la citada parte aerodinámica.
20. Procedimiento de torsión de acuerdo con una de las reivindicaciones 16 a 19, caracterizado por que comprende una función que, en caso de fallo de los citados medios de mando (25 a 31) , impone que la frecuencia propia bajo fuerza centrífuga de torsión de cada citada pala alrededor de su envergadura, sea igual a la frecuencia propia bajo fuerza centrífuga de torsión de su parte aerodinámica (A) alrededor de su envergadura, de modo que se evite cualquier divergencia de resonancia de torsión de las citadas palas.
Patentes similares o relacionadas:
Conjunto de junta y método de formación del mismo, del 12 de Febrero de 2020, de THE BOEING COMPANY: Conjunto de junta que comprende: un primer componente formado a partir de un primer material, siendo el primer componente un cuerpo de un conjunto de larguero […]
Pala de rotor de instalación de energía eólica, del 17 de Octubre de 2018, de Wobben Properties GmbH: Pala de rotor de instalación de energía eólica , en donde la pala de rotor está configurada en modo de compuesto de fibras, con una estructura […]
Capa de protección de bordes de ataque de elementos alares de aeronaves, del 29 de Noviembre de 2017, de Airbus Helicopters: Dispositivo de protección de elemento alar caracterizado por que está constituido por un complejo que comprende una película polimérica […]
Sistema de peso ajustable de borde de fuga para palas de rotor principal de helicóptero, del 28 de Diciembre de 2016, de THE BOEING COMPANY: Un rotor de aeronave que comprende: una pala de rotor que tiene una longitud longitudinal con extremos opuestos proximal y distal , […]
Ensamblaje de segmentos de piezas estructurales, del 21 de Septiembre de 2016, de Airbus Safran Launchers SAS: Ala o aspa en al menos dos segmentos (1a, 1b) encarados, los cuales incluyen cada uno una estructura portante longitudinal (2a, 2b, 22) provista de […]
 SISTEMA Y PROCEDIMIENTO SUSTENTADOR, PROPULSOR Y ESTABILIZADOR PARA AERONAVES DE DESPEGUE Y ATERRIZAJE VERTICAL, MEJORADO, del 11 de Febrero de 2014, de MUÑOZ SAIZ,MANUEL: El primer certificado de adición a la patente N° P201001236 por sistema y procedimiento sustentador, propulsor y estabilizador para aeronaves de despegue y aterrizaje […]
SISTEMA Y PROCEDIMIENTO SUSTENTADOR, PROPULSOR Y ESTABILIZADOR PARA AERONAVES DE DESPEGUE Y ATERRIZAJE VERTICAL, MEJORADO, del 11 de Febrero de 2014, de MUÑOZ SAIZ,MANUEL: El primer certificado de adición a la patente N° P201001236 por sistema y procedimiento sustentador, propulsor y estabilizador para aeronaves de despegue y aterrizaje […]
Soporte de rigidez revestido y procedimiento para su fabricación, del 23 de Agosto de 2013, de Momentive Specialty Chemicals GmbH: Procedimiento para la fabricación de un soporte de rigidez revestido, cuya superficie presenta un revestimientode una composición termoendurecible, […]
 SISTEMA DE CONSTRUCCION DE PALAS DE AEROGENERADOR, del 27 de Octubre de 2009, de TORRES MARTINEZ,MANUEL: Sistema de construcción de palas de aerogenerador, según el cual el conjunto estructural de la pala se forma con un cuerpo aerodinámico y un acoplamiento independiente […]
SISTEMA DE CONSTRUCCION DE PALAS DE AEROGENERADOR, del 27 de Octubre de 2009, de TORRES MARTINEZ,MANUEL: Sistema de construcción de palas de aerogenerador, según el cual el conjunto estructural de la pala se forma con un cuerpo aerodinámico y un acoplamiento independiente […]