Motocicleta.
Una motocicleta (1) que comprende:
una fuente motriz (10a);
una rueda (7) accionada por la fuente motriz (10a);
una rueda accionada (4); y
caracterizada por;
una parte de control (20, 33), en la que la parte de control (20, 33) controla la fuente motriz (10a) en base a una señal de deslizamiento corregida obtenida restando un componente de baja frecuencia de una pre-corrección de la señal de deslizamiento de la pre-corrección de la señal de deslizamiento calculada en base a una velocidad de la rueda motriz (7) y una velocidad de la rueda accionada (4).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08250062.
Solicitante: YAMAHA HATSUDOKI KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 2500 SHINGAI IWATA-SHI, SHIZUOKA 438-8501 JAPON.
Inventor/es: Fujita,Hirokazu, Kinoshita,Tomohiro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60K28/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 28/00 Dispositivos de seguridad para el control de la unidad de propulsión, especialmente adaptados para o dispuestos en vehículos, p. ej. que impiden el suministro de combustible o el encendido en caso de condiciones potencialmente peligrosas (para vehículos propulsados eléctricamente B60L 3/00; sistemas para control de la conducción del vehículo para fines no relacionados con el control de una subunidad particular B60W 30/00; sistemas de control d la conducción especialmente adaptados para vehículos terrestres autónomos B60W 60/00). › que responden o previenen el derrape o patinado de las ruedas (sistemas de control del frenado para la estabilidad del vehículo B60T 8/1755; dispositivos que regulan la fuerza de frenado sobre la rueda según una condición de velocidad B60T 8/32; control de la estabilidad del vehículo por otros medios distintos al control de la unidad propulsora únicamente B60W 30/02; prevención del patinado reduciendo la fuerza motriz en vehículos de raíl B61C 15/12).
- B60W10/06 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de motores de combustión.
- B60W40/06 B60W […] › B60W 40/00 Cálculo o estimación de los parámetros de funcionamiento para el sistema de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › Condiciones de la vía.
- F02D29/02 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F02 MOTORES DE COMBUSTION; PLANTAS MOTRICES DE GASES CALIENTES O DE PRODUCTOS DE COMBUSTION. › F02D CONTROL DE LOS MOTORES DE COMBUSTION (accesorios para el control automático de la velocidad en vehículos, que actúan sobre una sola subunidad del vehículo B60K 31/00; control conjunto de subunidades del vehículo de diferente tipo o diferente función, sistemas de control de la propulsión de vehículos de carretera para propósitos distintos que el control de una sola subunidad B60W; válvulas de funcionamiento cíclico para los motores de combustión F01L; control de la lubrificación de los motores de combustión F01M; refrigeración de los motores de combustión interna F01P; alimentación de los motores de combustión con mezclas combustibles o constituyentes de las mismas, p. ej. carburadores, bombas de inyección, F02M; arranque de los motores de combustión F02N; control del encendido F02P; control de las plantas motrices de turbinas de gas, de las plantas motrices por propulsión a reacción o de las plantas motrices de productos de la combustión, ver las clases relativas a estas plantas). › F02D 29/00 Control de motores, siendo tal control específico de los dispositivos accionados por ellos, siendo los dispositivos distintos de las partes o accesorios esenciales para el funcionamiento del motor, p. ej. control de motores por los signos exteriores. › particular a los motores que accionan vehículos; particular o a los motores que accionan hélices de paso variable.
PDF original: ES-2382373_T3.pdf
Fragmento de la descripción:
Motocicleta
Campo de la invención
La invención se refiere a una motocicleta, a un dispositivo y un procedimiento para controlar la misma y a un dispositivo y un procedimiento para detectar una cantidad de deslizamiento de una motocicleta.
Antecedentes de la invención
Se conocen varios tipos de procedimientos de control de tracción de una motocicleta, por ejemplo, como se ha divulgado en el documento JP-A-8-232.697. Procedimientos de control de tracción que actúan en base a una relación de deslizamiento, por ejemplo, se consideran. En un procedimiento de este tipo en base una relación de deslizamiento, la relación de deslizamiento se calcula en base a una velocidad de giro de una rueda motriz y una velocidad de giro de una rueda accionada. La fuerza motriz de un vehículo se controla de acuerdo con la relación de deslizamiento calculada.
Una relación de la longitud circunferencial de los neumáticos entre una rueda delantera y una rueda trasera cambia, sin embargo, de acuerdo con un ángulo de inclinación de una motocicleta (referido como un "ángulo de inclinación lateral", en lo sucesivo) . En consecuencia, la relación de deslizamiento se calcula cuando la moto está inclinada, incluso cuando la motocicleta no desliza. Además, en el caso en que la motocicleta se ha deslizado, la inclinación de la motocicleta provoca una relación de deslizamiento mayor o menor que una relación de deslizamiento adecuada para que se calcule un grado deslizamiento real. Existe, por tanto, el problema de que es imposible llevar a cabo un control de tracción preciso de una motocicleta de acuerdo con el procedimiento anterior.
En vista de lo anterior, se ha propuesto un procedimiento de control de tracción que toma en consideración un ángulo de inclinación lateral, como se describe en el documento JP-A-8-232.697. En esta referencia, un grado de deslizamiento de aceleración se determina en base a un grado o la anchura de un cambio en la velocidad de giro (o número de giro) de un motor. Retrasar un ángulo de la regulación de encendido del motor de acuerdo con el grado determinado del deslizamiento permite que se controle la potencia del motor. En el procedimiento de control de tracción del documento JP-A-8-232697, el control se realiza de modo que cuanto mayor sea el ángulo de inclinación lateral, mayor será el ángulo de retardo de la regulación de encendido del motor. Además, la cantidad de retardo de la regulación de encendido del motor se controla para tener que aumentarse aún más en la inclinación lateral de acuerdo con un aumento en la anchura de un cambio en el número de giro del motor.
El documento JP-A-8-232697 describe que una potencia del motor se suprime en la inclinación lateral y esto permite que se evite un deslizamiento de una rueda motriz en la inclinación lateral de acuerdo con el procedimiento anterior.
La relación entre la longitud circunferencial de los neumáticos entre una rueda delantera y una rueda trasera no sólo depende de un ángulo de inclinación lateral. Por ejemplo, la relación de la longitud circunferencial cambia también cuando cambia la velocidad de una motocicleta y, por tanto, cambia una relación de expansión de un neumático. Esto provoca el problema de que no se puede realizar el control de tracción preciso de una motocicleta incluso de acuerdo con el procedimiento de control de tracción que se ha desvela en, por ejemplo, el documento JP-A-8232697.
En vista de lo anterior, un objeto de la invención es lograr un control de tracción más preciso de una motocicleta.
El documento US 4.554.990 desvela un sistema anti-deslizante para un vehículo de ruedas que tiene una rueda motriz y una rueda tractora. Un sensor de velocidad de la rueda motriz detecta una velocidad de giro de la rueda motriz para producir una primera señal de detección, mientras que sensor de velocidad de la rueda tractora detecta una velocidad de giro de la rueda tractora para producir una segunda señal de detección. Una unidad de control es sensible a la primera y segunda señales de detección para producir una señal de control representativa de una tasa de deslizamiento de la rueda motriz. Un dispositivo de control de accionamiento es sensible a la señal de control para controlar la fuerza motriz de la rueda motriz para evitar un deslizamiento de la misma.
Sumario de la invención
La motocicleta de acuerdo con la invención comprende: una fuente motriz; una rueda accionada por la fuente motriz; una rueda tractora; y parte de control. La motocicleta de acuerdo con la invención comprende además: un sensor de velocidad de la rueda motriz, y un sensor de velocidad de la rueda tractora. El sensor de velocidad de la rueda motriz detecta una velocidad de la rueda motriz. El sensor de velocidad de la rueda tractora detecta una velocidad de la rueda tractora. La parte de control controla la fuente de impulso de tubo en base a una señal de deslizamiento corregida. La señal de deslizamiento corregida se obtiene restando un componente de baja frecuencia de una precorrección de la señal de deslizamiento de la pre-corrección de la señal de deslizamiento. La pre-corrección de la señal de deslizamiento se obtiene restando una velocidad de la rueda tractora, la velocidad detectada por medio del sensor de velocidad de la rueda tractora, de una velocidad de la rueda motriz, está última velocidad detectada por medio del sensor de velocidad de la rueda motriz.
El dispositivo de control de acuerdo con la invención es para controlar una motocicleta y comprende: una fuente de impulso; una rueda motriz accionada por medio de la fuente de impulso; una rueda tractora, un sensor de velocidad de la rueda motriz para detectar una velocidad de la rueda motriz, y un sensor de velocidad de la rueda tractora para detectar una velocidad de la rueda tractora. El dispositivo de control de acuerdo con la invención controla la fuente de impulso en base a una señal de deslizamiento corregida. La señal de deslizamiento corregida se obtiene restando un componente de baja frecuencia de la pre-corrección de la señal de deslizamiento de la pre-corrección de la señal de deslizamiento. La pre-corrección de la señal de deslizamiento se obtiene restando una velocidad de la rueda tractora, la velocidad detectada por medio del sensor de velocidad de la rueda tractora, de una velocidad de la rueda motriz, esta última velocidad detectada por medio del sensor de velocidad de la rueda motriz.
El dispositivo que detecta la cantidad de deslizamiento de acuerdo con la invención es para detectar una cantidad de deslizamiento de una motocicleta y comprende: una fuente de impulso; una rueda motriz accionada por medio de la fuente de impulso; una rueda tractora, un sensor de velocidad de la rueda motriz para detectar una velocidad de la rueda motriz, y un sensor de velocidad de la rueda tractora para detectar una velocidad de la rueda tractora. El dispositivo que detecta la cantidad de deslizamiento de acuerdo con la invención detecta una cantidad de deslizamiento de la motocicleta restando un componente de baja frecuencia de la pre-corrección de la señal de deslizamiento de la pre-corrección de la señal de deslizamiento obtenida restando una velocidad de la rueda tractora, la velocidad detectada por medio del sensor de velocidad de la rueda tractora, de una velocidad de la rueda motriz, esta última velocidad detectada por medio del sensor de velocidad de la rueda motriz..
El procedimiento de control de acuerdo con la invención es para controlar de una motocicleta y comprende: una fuente de impulso; una rueda motriz accionada por medio de la fuente de impulso; una rueda tractora, un sensor de velocidad de la rueda motriz para detectar una velocidad de la rueda motriz, y un sensor de velocidad de la rueda tractora para detectar una velocidad de la rueda tractora. El procedimiento de control de acuerdo con la invención controla la fuente de impulso en base a una señal de deslizamiento corregida. La señal de deslizamiento corregida se obtiene restando un componente de baja frecuencia de la pre-corrección de la señal de deslizamiento de la precorrección de la señal de deslizamiento. La pre-corrección de la señal de deslizamiento se obtiene restando una velocidad de la rueda tractora, la velocidad detectada por medio del sensor de velocidad de la rueda tractora, de una velocidad de la rueda motriz, esta última velocidad detectada por medio del sensor de velocidad de la rueda motriz.
El procedimiento que detecta la cantidad de deslizamiento de acuerdo con la invención es para detectar una cantidad de deslizamiento de una... [Seguir leyendo]
Reivindicaciones:
1. Una motocicleta (1) que comprende:
una fuente motriz (10a) ; una rueda (7) accionada por la fuente motriz (10a) ; una rueda accionada (4) ; y caracterizada por; una parte de control (20, 33) , en la que la parte de control (20, 33) controla la fuente motriz (10a) en base a una señal de deslizamiento corregida obtenida restando un componente de baja frecuencia de una pre-corrección de la señal de deslizamiento de la pre-corrección de la señal de deslizamiento calculada en base a una velocidad de la rueda motriz (7) y una velocidad de la rueda accionada (4) .
2 La motocicleta (1) de acuerdo con la reivindicación 1, que comprende además:
un sensor (32) de velocidad de la rueda motriz para detectar una velocidad de la rueda motriz (7) ; y un sensor (31) de velocidad de la rueda tractora para detectar una velocidad de la rueda accionada (4) .
3. La motocicleta (1) de acuerdo con la reivindicación 1 ó 2, en la pre-corrección de la señal de deslizamiento se obtiene restando una velocidad de la rueda accionada (4) de una velocidad de la rueda motriz (7) .
4. La motocicleta (1) de acuerdo con la reivindicación 1 ó 2, en la que la pre-corrección de la señal de deslizamiento se obtiene dividiendo una velocidad de la rueda motriz (7) entre una velocidad de la rueda accionada (4) .
5. La motocicleta (1) de acuerdo con cualquier reivindicación anterior, en la que el componente de baja frecuencia es un componente que tiene una frecuencia igual o inferior a 5 hertzios.
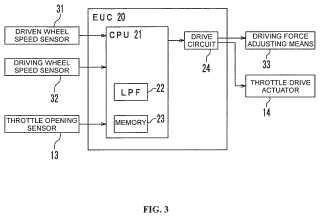
6 La motocicleta (1) de acuerdo con cualquier reivindicación anterior, en la que la parte de control (20, 33) incluye:
una parte de operación (21, 24) para emitir una señal de control correspondiente a la señal de deslizamiento corregida; y un parte de ajuste de la fuerza motriz (33) para controlar la fuente motriz (10a) de acuerdo con la señal de control.
7. La motocicleta (1) de acuerdo con la reivindicación 6, en la que la parte de control (20, 33) incluye además:
un filtro de paso bajo (22) para tomar el componente de baja frecuencia de la pre-corrección de la señal de deslizamiento; en la que la parte de operación (21, 24) calcula la pre-corrección de la señal de deslizamiento, emite la precorrección de la señal de deslizamiento al filtro de paso bajo (22) y resta el componente de baja frecuencia tomado a través del filtro de paso bajo (22) de la pre-corrección de la señal de deslizamiento para obtener la señal de deslizamiento corregida.
8. La motocicleta (1) de acuerdo con la reivindicación 6, en la que la parte de operación (21, 24) calcula la precorrección de la señal de deslizamiento, toma el componente de baja frecuencia de la pre-corrección de la señal de deslizamiento y resta el componente de baja frecuencia de la pre-corrección de la señal de deslizamiento para obtener la señal de deslizamiento corregida.
9 La motocicleta (1) de acuerdo con una cualquiera de las reivindicaciones 1 a 5, en la que la parte de control (20, 33) incluye:
un filtro de paso alto (25) para tomar un componente de alta frecuencia distinto al componente de baja frecuencia de la pre-corrección de la señal de deslizamiento; una parte de operación (21, 24) para calcular la pre-corrección de la señal de deslizamiento y que proporciona la pre-corrección de la señal de deslizamiento al filtro de paso alto (25) para emitir una señal de control correspondiente a el componente de alta frecuencia tomado a través del filtro de paso alto (25) ; y un parte de ajuste de la fuerza motriz (33) para controlar la fuente motriz (10a) de acuerdo con la señal de control.
10. La motocicleta (1) de acuerdo con una cualquiera de las reivindicaciones 1 a 5, en la que la parte de control (20, 33) incluye:
una parte de operación (21, 24) para calcular la pre-corrección de la señal de deslizamiento, tomar un componente de alta frecuencia distinto al componente de baja frecuencia de la pre-corrección de la señal de deslizamiento y emitir una señal de control correspondiente al componente de alta frecuencia; y una parte de ajuste de la fuerza motriz (33) para controlar la fuente motriz (10a) de acuerdo con la señal de control.
11. La motocicleta (1) de acuerdo con una cualquiera de las reivindicaciones 1 a 5, en la que la parte de control (20, 33) incluye:
una parte de almacenamiento (23) para almacenar datos límite relativos a un valor límite superior y a un valor límite inferior de la pre-corrección de la señal de deslizamiento; una parte límite (26) para limitar la pre-corrección de la señal de deslizamiento en base a los datos límite de modo que la pre-corrección de la señal de deslizamiento será igual o mayor que el valor límite inferior e igual o menor que el valor límite superior; una parte de operación (21, 24) para emitir una señal de control que corresponde a la señal de deslizamiento corregida obtenida restando un componente de baja frecuencia de la pre-corrección de la señal de deslizamiento después de la limitación de la pre-corrección de la señal de deslizamiento; y una parte de ajuste de la fuerza motriz (33) para controlar la fuente motriz (10a) de acuerdo con la señal de control.
12. La motocicleta (1) de acuerdo con la reivindicación 11, en la que la parte de control (20, 33) incluye además:
un filtro de paso bajo (22) para tomar el componente de baja frecuencia de una pre-corrección de la señal de deslizamiento después de la limitación; y la parte de operación (21, 24) resta el componente de baja frecuencia de la pre-corrección de la señal de deslizamiento después de la limitación, el componente de baja frecuencia tomado a través del filtro de paso bajo, de la pre-corrección de la señal de deslizamiento para obtener la señal de deslizamiento corregida.
13. La motocicleta (1) de acuerdo con la reivindicación 11 ó 12, en la que los datos límite indican una correlación de al menos una de una velocidad de la rueda motriz (7) y una velocidad de la rueda accionada (4) con los datos del valor límite superior y los datos del valor límite inferior de la pre-corrección de la señal de deslizamiento.
14 La motocicleta (1) de acuerdo con una cualquiera de las reivindicaciones 1 a 5, que comprende:
un sensor de abertura del regulador (13) para detectar una abertura del regulador; y una parte de detección del par (34) para detectar el par de la fuente motriz (10a) ; en la que la parte de control (20, 33) incluye:
una parte de almacenamiento (23) para almacenar los datos de las constantes de tiempo que indican una correlación de al menos una de una velocidad de la rueda motriz (7) , una velocidad de la rueda accionada (4) , una abertura del acelerador y el par de la fuente de impulso (10a ) con una constante de tiempo; una parte de operación (21, 24) para emitir una señal de control correspondiente a la señal de deslizamiento corregida; y una parte (33) de ajuste de la fuerza motriz para controlar la fuente motriz (10a) de acuerdo con la señal de control, en la que la parte de operación (21, 24) resta un componente de baja frecuencia de la pre-corrección de la señal de deslizamiento, el componente de baja frecuencia recortado por medio de una frecuencia de corte en base a los datos de las constantes de tiempo, de la pre-corrección de la señal de deslizamiento para obtener la señal de deslizamiento corregida.
15. La motocicleta (1) de acuerdo con una cualquiera de las reivindicaciones 1 a 5, en la que la parte de control (20, 33) incluye:
una parte de almacenamiento (23) para almacenar los datos de las constantes de tiempo que indica una correlación de al menos una de una velocidad de la rueda motriz (7) , una velocidad de la rueda accionada (4) , una abertura del acelerador y el par de la fuente de impulso (10a) con una constante de tiempo y los datos límite relativos a un valor límite superior y a un valor límite inferior de la pre-corrección de la señal de deslizamiento; una parte límite (26) para limitar el deslizamiento de la señal de pre-corrección en base a los datos límite para que la pre-corrección de la señal de deslizamiento sea igual o mayor que el valor límite inferior e igual o menor que el valor límite superior; una parte de operación (21, 24) para emitir una señal de control correspondiente a la señal de deslizamiento corregida; y una parte de ajuste de la fuerza motriz (33) para controlar la fuente motriz (10a) de acuerdo con la señal de control, en la que la parte de operación (21, 24) resta un componente de baja frecuencia de la pre-corrección de la señal de deslizamiento después de la limitación, el componente de baja frecuencia cortado por medio de una frecuencia de corte en base los datos de las constantes de tiempo, de la pre-corrección de la señal de deslizamiento para obtener la señal de deslizamiento corregida.
16. La motocicleta (1) de acuerdo con cualquier reivindicación anterior, en la que la anchura de la rueda motriz (7) y la anchura de la rueda accionada (4) son diferentes entre sí.
17. La motocicleta (1) de acuerdo con cualquier reivindicación anterior, en la que la rueda motriz (7) se forma a partir de una o varias ruedas.
18 Un dispositivo de control de una motocicleta (1) que comprende:
una fuente motriz (10a) ; una rueda motriz (7) accionada por medio de la fuente de impulso (10a) ; una rueda accionada (4) ; un sensor (32) de velocidad de la rueda motriz para detectar una velocidad de la rueda motriz (7) ; y un sensor (31) de velocidad de la rueda accionada para detectar una velocidad de la rueda accionada (4) , controlando el dispositivo de control la fuente de impulso (10a) en base a una señal de deslizamiento corregida obtenida restando una componente de baja frecuencia de una pre-corrección de la señal de deslizamiento de la pre-corrección de la señal de deslizamiento obtenida restando una velocidad de la rueda accionada (4) , la velocidad detectada por medio del sensor (31) de velocidad de la rueda tractora, de una velocidad de la rueda motriz (7) , esta última velocidad se detecta por medio del sensor (32) de velocidad de la rueda motriz.
19. Un dispositivo de detección de la cantidad de deslizamiento de una motocicleta (1) que comprende:
una fuente motriz (10a) ; una rueda motriz (7) accionada por medio de la fuente motriz (10a) ; una rueda accionada (4) ; un sensor (32) de velocidad de la rueda motriz para detectar una velocidad de la rueda motriz (7) ; y un sensor (31) de velocidad de la rueda accionada para detectar una velocidad de la rueda accionada (4) , detectando el dispositivo de detección de la cantidad de deslizamiento una cantidad de deslizamiento de la motocicleta (1) restando un componente de baja frecuencia de una pre-corrección de la señal de deslizamiento de la pre-corrección de la señal de deslizamiento obtenida restando una velocidad de la rueda accionada (4) , la velocidad detectada por medio del sensor (31) de velocidad de la rueda accionada, de una velocidad de la rueda motriz (7) , esta última velocidad detecta por medio del sensor (32) de velocidad de la rueda motriz.
20. Un procedimiento para controlar una motocicleta (1) que comprende una fuente de impulso (10a) , una rueda accionada (4) y una rueda motriz (7) , comprendiendo dicho procedimiento las etapas de:
determinar una señal de deslizamiento de pre-corregida restando una velocidad de la rueda accionada (4) de una velocidad de la rueda motriz (7) ; caracterizado por; determinar una señal de deslizamiento corregida restando un componente de baja frecuencia de una precorrección de la señal de deslizamiento de la pre-corrección de la señal de deslizamiento; y controlar la fuente motriz (10a) en base a la señal de deslizamiento corregida.
21. Un procedimiento para controlar una motocicleta (1) de acuerdo con la reivindicación 20, comprendiendo además la motocicleta (1) :
un sensor (32) de velocidad de la rueda motriz para detectar una velocidad de la rueda motriz (7) ; y un sensor (31) de velocidad de la rueda tractora para detectar una velocidad de la rueda accionada (4) , comprendiendo el procedimiento para controlar una motocicleta (1) las etapas adicionales de:
detectar una velocidad de la rueda accionada (4) por medio del sensor (31) de velocidad de la rueda tractora; y detectar una velocidad de la rueda accionada (7) por medio del sensor (32) de velocidad de la rueda motriz.
22. Un procedimiento para detectar una cantidad de deslizamiento de una motocicleta (1) que comprende:
una fuente motriz (10a) ; una rueda motriz (7) accionada por medio de la fuente motriz (10a) ; una rueda accionada (4) ; un sensor (32) de velocidad de la rueda motriz para detectar una velocidad de la rueda motriz (7) ; y un sensor (31) de velocidad de la rueda accionada para detectar una velocidad de la rueda accionada (4) , comprendiendo el procedimiento de detección de la cantidad de deslizamiento la detección de una cantidad de deslizamiento de la motocicleta (1) restando un componente de baja frecuencia de una pre-corrección de la señal de deslizamiento de la pre-corrección de la señal de deslizamiento obtenida restando una velocidad de la rueda accionada (4) , la velocidad detectada por medio del sensor (31) de velocidad de la rueda accionada, de una velocidad de la rueda motriz (7) , esta última velocidad detectada por medio del sensor (32) de velocidad de la rueda motriz.
23. Una motocicleta (1) de acuerdo con la reivindicación 1, que comprende además:
un sensor (32) de velocidad de la rueda motriz para detectar una velocidad de la rueda motriz (7) ; y un sensor (31) de velocidad de la rueda accionada para detectar una velocidad de la rueda accionada (4) , en la que la velocidad de la rueda motriz (7) se detecta por medio del sensor (32) de velocidad de la rueda motriz, y la velocidad de la rueda accionada (4) se detecta por medio del sensor (31) de velocidad de la rueda accionada.
Patentes similares o relacionadas:
Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, del 29 de Abril de 2020, de IVECO S.P.A.: Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, comprendiendo la línea motriz: - una caja de engranajes (GR) que […]
Vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática, del 8 de Abril de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un operador de acelerador […]
 Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
CONJUNTO PARA LIMITACION DE VELOCIDAD DE FORMA AUTOMÁTICA EN VEHÍCULOS, del 20 de Noviembre de 2019, de MARTINEZ BONET, Francisco Jose: 1. Conjunto para limitación de velocidad de forma automática en vehículos caracterizado porque comprende un asistente de velocidad encargado […]
Máquina de trabajo autopropulsada, así como procedimiento para frenar una máquina de trabajo de esa clase, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular un camión volquete o camión, con un accionamiento eléctrico que comprende al menos un motor […]
Máquina de trabajo autopropulsada así como procedimiento para frenar una máquina de trabajo de este tipo, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular vehículo oruga tal como una niveladora, con un accionamiento eléctrico que comprende al menos un motor […]
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de transmisión automática y vehículo del tipo de montar a horcajadas equipado con el aparato, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un embrague incluyendo un rotador de lado […]