Modo de la propulsión de onda de embarcaciones.
Modo de la propulsión de onda de embarcaciones que consta en poner una cierta cantidad de brazos (2) en marcha en el plano perpendicular al sentido del flujo de líquido,
los brazos (2) que en una cierta parte del largo que sale del casco de una embarcación tienen fijado elemento superficial de presión (1), y cada uno de los brazos (2) es puesto en movimiento oscilatorio o plano y reversible por el generador individual (3) de amplitud variable (A) y frecuencia (f) de traslados, controlados desde la unidad central electrónica de control (4), se caracteriza de que los brazos (2) generan la onda locomotora de característica variable y los valores de amplitudes vecinas (A1, A2 ; A2, A3 ; ...) de la onda locomotora en el momento dado no son fijos sino que crecen a medida que crece la distancia desde la cabeza del sistema hacia su centro tal que la relación (s) entre las amplitudes actualmente vecinas (A2/A1 ; A3/A2 ; ...) cabe en el límite entre 1 y 2.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/PL2007/000031.
Solicitante: LATACZ, MICHAL.
Nacionalidad solicitante: Polonia.
Dirección: KOPERNIKA 50/11 42-200 CZESTOCHOWA POLONIA.
Inventor/es: LATACZ,MICHAL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63H1/36 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 1/00 Elementos de propulsión que actúan directamente sobre el agua (propulsión por reacción B63H 11/00). › Aletas con movimiento oscilante, p. ej. del tipo cola de pez.
PDF original: ES-2530076_T3.pdf
Descripción:
Modo de la propulsión de onda de embarcaciones
[1] El objeto de invención es modo de la propulsión de onda de embarcaciones, lacustres y submarinas.
[2] Actualmente muchos aparatos emplean los elementos de onda para empujar las embarcaciones, donde los líquidos se mezclan de forma perpendicular al plano de la oscilación de elementos.
[3] La propulsión de onda en las embarcaciones conocidas es generada por medio de la puesta en marcha oscilante o plano y reversible, en el plano perpendicular al sentido de flujo de líquido, cantidad determinada de brazos que en una parte del largo que sale del cuerpo de la embarcación tienen fijado elemento superficial de presión. En la mayoría de las soluciones conocidas, presentadas como ejemplo en las descripciones de patentes US 362651, US 5611666, RU 29958 y ES 2174, los brazos se mueven solamente con la posibilidad de cambiar las frecuencias manteniendo la amplitud fija de movimiento. El rendimiento hidrodinámico de la propulsión con la onda locomotora de amplitud fija efectivamente es reducida en condiciones de cambio de la velocidad demandada de la unidad, sobre todo, debido al giro del flujo a lo largo del elemento superficial de presión.
[4] Es conocida también de la descripción de la invención EP 93288 la solución de un vehículo que navega con la propulsión de onda, donde cada uno de los brazos que realizan el movimiento en el plano perpendicular al sentido de flujo de líquido es propulsado por el generador individual de amplitud y frecuencia de desplazamientos variables que son controlados desde la unidad central, electrónica de control. La descripción no revela la forma de controlar los parámetros de la iniciada onda locomotora para aumentar el rendimiento hidrodinámico de la propulsión con diferentes velocidades de la unidad.
[5] El modo de generar el movimiento de flujo de la embarcación mencionado en la presente invención emplea, de forma parecida como a las soluciones mencionadas arriba, la generación de movimiento en el plano perpendicular en el sentido de flujo de líquido por medio del movimiento de cierto número de brazos, que en una parte del largo que sale del cuerpo de la embarcación tienen fijado elemento superficial de presión.
Las esencia de la invención consta en que los brazos generan una onda locomotora de característica variable y los valores de las amplitudes vecinas de la onda locomotora en el momento dado no son fijas sino que aumentan con la distancia desde la cabeza del sistema hacia su centro tal que la relación entre las actuales amplitudes vecinas tiene el valor en el intervalo de 1 a 2.
[6] Favorablemente, el contorno de silueta de la superficie del elemento de presión, cuando los brazos se sitúan en el mismo plano, tiene la forma de la línea curva y el contorno de silueta es simétrico al eje de simetría del elemento de presión.
[7] La solución presentada arriba arranca el flujo de onda del líquido lo cual, junto con el sistema de elementos independientemente móviles, oscilatorios o planos que constituyen un
separado y elástico grupo de elementos estructurales, permite crear la onda locomotora. Los parámetros de esta onda, es decir, las amplitudes de los respectivos brazos y la frecuencia de su trabajo, pueden ser modificados en función de la velocidad del flujo de líquido a lo largo del elemento superficial de presión, en tiempo real, de forma continua e independiente de sí. El resultado de control de la característica de la onda y de la geometría especial del elemento de presión es proteger el flujo laminar del líquido a lo largo de su superficie y garantizar parámetros óptimos que resultan de la mecánica del líquido dado, parámetros de la onda locomotora, seleccionados adecuadamente a la velocidad deseada del flujo de líquido por medio del elemento superficial de presión inundado que garantiza con lo mismo la mejora del coeficiente del rendimiento hidrodinámico.
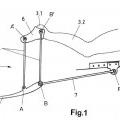
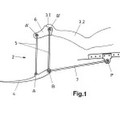
[8] El modo según la invención es explicado a base de la descripción de cómo funciona la solución ejemplar para la embarcación (según demostrado en la figura) y cómo es su estructura. La figura 1 presenta la sección en perspectiva del aparato de propulsión; figura 2 - uno de los modos del sistema de dos elementos de presión en la embarcación; figura 3 - geometría de la curva locomotora en el momento de acelerar la embarcación desde la velocidad cero; figura 4 - geometría de la curva locomotora en el momento cuando la embarcación consigue la velocidad media de progreso; figura 5 - geometría de la curva locomotora en el momento cuando la embarcación consigue su velocidad máxima de progreso; figura 6 - contorno del elemento superficial de presión en la sección horizontal; figura 7 - posibles variantes de la configuración del elemento de presión de un cuerpo y de dos cuerpos de una embarcación lacustre y submarina.
[9] El modo de controlar la propulsión de la embarcación según la invención está presentado a base del sistema de propulsión con brazos oscilatorios, indicada en la figura 1. En la variante presentada, el elemento superficial de presión (1) es membrana flexible de caucho que une los respectivos brazos (2). El agua se mueve perpendicularmente al plano de la oscilación de los brazos (2). Los servomotores hidráulicos bilaterales se usaron como generadores de movimiento (3). Cada generador (3) está conectado a dos distribuidores independientes (7). El sistema está dotado del depósito de flujo (6) y de bomba fija de desagüe (8) que suministra el factor de trabajo paralelamente a todos los generadores (3). El cambio de características de las ondas locomotoras que está presentada en las figuras 3, 4 y 5, se consigue por medio del cambio de los tiempos de apertura de las válvulas de distribuidores (7) controlados por la unidad central electrónica de control (4). El software de control del trabajo de los distribuidores garantiza la selección de la característica de las ondas en función de la velocidad de la embarcación requerida por el operador así como de la velocidad corriente de la embarcación. Cuando la velocidad de la embarcación aumenta de cero, es decir, cuando la embarcación empieza a moverse, las amplitudes (A) de ondas son relativamente grandes y la frecuencia de trabajo del sistema es baja según presentado en la figura 3. Cuando la velocidad de progreso aumenta, las amplitudes (A) del movimiento de respectivos brazos (2) bajan y crece la frecuencia del sistema entero, lo cual se presenta en la figura 4, hasta que consiga el valor máximo como presentado en la figura 5 cuando la frecuencia de trabajo consiga su valor máximo. Los valores de las amplitudes vecinas (A) de la onda locomotora en el momento dado no son fijas sino que aumentan con la distancia desde la cabeza del sistema hacia su centro, como presentado en las figuras 3, 4 y 5. El símbolo Vc
se refiere a la velocidad relativa del flujo de líquido y el símbolo Vp se refiere a la velocidad absoluta de progreso de la embarcación.
Reivindicaciones:
1. Modo de la propulsión de onda de embarcaciones que consta en poner una cierta cantidad de brazos (2) en marcha en el plano perpendicular al sentido del flujo de líquido, los brazos (2) que en una cierta parte del largo que sale del casco de una embarcación tienen fijado elemento superficial de presión (1), y cada uno de los brazos (2) es puesto en movimiento oscilatorio o plano y reversible por el generador Individual (3) de amplitud variable (A) y frecuencia (f) de traslados, controlados desde la unidad central electrónica de control (4), se caracteriza de que los brazos (2) generan la onda locomotora de característica variable y los valores de amplitudes vecinas (A1; A2; A2, A3;...) de la onda locomotora en el momento dado no son fijos sino que crecen a medida que crece la distancia desde la cabeza del sistema hacia su centro tal que la relación (s) entre las amplitudes actualmente vecinas (A^Ai; A3/A2 ;...) cabe en el límite entre 1 y 2.
2. El modo según la reivindicación 1 se caracteriza con que el contorno de silueta (5) de la superficie del elemento de presión (1) cuando los brazos (2) se sitúan en el mismo plano, tiene la forma de la línea curva.
3. El modo según la reivindicación 2 se caracteriza en que el contorno de silueta (5) es simétrico en relación al eje de simetría del elemento de presión (1).
Patentes similares o relacionadas:
DISPOSITIVO INDIVIDUAL PARA LA PROPULSIÓN ACUÁTICA, del 9 de Abril de 2020, de MEINEL CHEESMAN, Kurt Franz: En resumen, se trata de un dispositivo que impulsa a un nadador a desplazarse sobre la superficie o por debajo del agua permitiéndole ascender, […]
 Embarcación de espejismo vertical, del 13 de Marzo de 2019, de HOBIE CAT COMPANY, A MISSOURI CORPORATION: Un dispositivo adaptado para insertarse en una embarcación , dicho dispositivo comprendiendo un miembro de soporte de accionamiento […]
Embarcación de espejismo vertical, del 13 de Marzo de 2019, de HOBIE CAT COMPANY, A MISSOURI CORPORATION: Un dispositivo adaptado para insertarse en una embarcación , dicho dispositivo comprendiendo un miembro de soporte de accionamiento […]
Sistema de propulsión para barcos, motos náuticas y similares, mediante aletas oscilantes accionadas eléctricamente, del 20 de Septiembre de 2018, de MUÑOZ SAIZ,MANUEL: El sistema de propulsión para barcos, motos náuticas y similares, mediante aletas oscilantes accionadas eléctricamente con electroimanes, actuadores, motores eléctricos […]
Dispositivo de propulsión inversa para embarcación, del 31 de Mayo de 2017, de Hobie Cat Company: Dispositivo que incluye medios de propulsión que se extienden por debajo de la línea de flotación que comprende un par de aletas flexibles , cada una adaptada para […]
Dispositivo de propulsión de inversión para embarcación, del 2 de Noviembre de 2016, de Hobie Cat Company: Un dispositivo adaptado para ser colocado en una embarcación, comprendiendo dicho dispositivo medios de propulsión adaptados para extenderse […]
 Vehículo acuático de propulsión por aleteo, del 24 de Agosto de 2015, de MARTIN ESTEFANIA, Gonzalo: Vehículo acuático de propulsión por aleteo, comprendiendo un elemento de flotación provisto con un mecanismo de propulsión que está formado por, al menos, una […]
Vehículo acuático de propulsión por aleteo, del 24 de Agosto de 2015, de MARTIN ESTEFANIA, Gonzalo: Vehículo acuático de propulsión por aleteo, comprendiendo un elemento de flotación provisto con un mecanismo de propulsión que está formado por, al menos, una […]
 VEHÍCULO ACUÁTICO DE PROPULSIÓN POR ALETEO, del 25 de Junio de 2015, de MARTIN ESTEFANIA, Gonzalo: Vehículo acuático de propulsión por aleteo, comprendiendo un elemento de flotación provisto con un mecanismo de propulsión que está formado por, […]
VEHÍCULO ACUÁTICO DE PROPULSIÓN POR ALETEO, del 25 de Junio de 2015, de MARTIN ESTEFANIA, Gonzalo: Vehículo acuático de propulsión por aleteo, comprendiendo un elemento de flotación provisto con un mecanismo de propulsión que está formado por, […]
APARATO SUMERGIBLE CON MEMBRANAS FLEXIBLES DE ESTANQUEIDAD, del 13 de Febrero de 2012, de TIRABY, CHRISTOPHE: Aparato sumergible capaz de ser sumergido en totalidad en un medio líquido que comprende: - un cuerpo hueco cerrado de manera estanca, de eje principal […]