MIEMBRO ARTICULADO PARA ROBOT O INTERFAZ HAPTICA Y ROBOR E INTERFAZ HAPTICA QUE COMPRENDE AL MENOS UNO DE TALES MIEMBROS ARTICULADOS.
Miembro articulado para robot o interfaz háptica que comprende al menos unos segmentos rígidos primero (2) y segundo (4) y una articulación (6),
comprendiendo dicha articulación (6) fibras y estando fijada en cada uno de los segmentos rígidos (2, 4), siendo las fibras, por ejemplo, de aramida, de kevlar o de polipropileno, caracterizado porque la articulación comprende también al menos un elemento (101, 102) de medida
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/057796.
Solicitante: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Nacionalidad solicitante: Francia.
Dirección: 25, RUE LEBLANC BATIMENT "LE PONANT D",75015 PARIS.
Inventor/es: GOSSELIN,FLORIAN.
Fecha de Publicación: .
Fecha Concesión Europea: 13 de Enero de 2010.
Clasificación Internacional de Patentes:
- B25J13/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › Medios de control por aprehensión manual.
Clasificación PCT:
- B25J13/08 B25J 13/00 […] › por medio de dispositivos sensores, p. ej. a la visión o al tacto.
- B25J17/00 B25J […] › Uniones.
- E05D1/02 CONSTRUCCIONES FIJAS. › E05 CERRADURAS; LLAVES; ACCESORIOS DE PUERTAS O VENTANAS; CAJAS FUERTES. › E05D BISAGRAS O DISPOSITIVOS DE SUSPENSION PARA PUERTAS, VENTANAS O BATIENTES (fijaciones con pivote en general F16C 11/00). › E05D 1/00 Bisagras o goznes sin pernos; Elementos reemplazables de las bisagras o goznes. › de una sola pieza.
Fragmento de la descripción:
Miembro articulado para robot o interfaz háptica y robot e interfaz háptica que comprende al menos uno de tales miembros articulados.
Campo técnico y técnica anterior
La presente invención se refiere a un miembro articulado para robot o para interfaz háptica y a robots y a interfaces hápticas que ponen en práctica al menos uno de tales miembros articulados.
La mayoría de los robots y de las interfaces hápticas que se conocen utilizan una cadena cinemática articulada constituida por varios cuerpos móviles interrelacionados mediante articulaciones que conectan una base fija con uno o unos efectores, en el caso de un robot industrial, o con una o unas garras que el usuario agarra en el caso de una interfaz con retorno de esfuerzo.
Estas cadenas poliarticuladas permiten controlar la posición y/o la orientación del elemento final respecto a la base.
Las articulaciones de la mayoría de los robots existentes se realizan a base de cojinetes de bolas o de cojinetes lisos. Esta solución permite optimizar las prestaciones de transmisión de los esfuerzos, al tiempo que reducen al mínimo los juegos y los rozamientos. Sin embargo, este tipo de articulaciones pone en aplicación numerosas piezas mecánicas que precisan de un ajuste preciso para asegurar el correcto funcionamiento de la articulación. Por tanto, estas articulaciones son complejas y costosas. Generalmente son, por otro lado, pesadas y voluminosas respecto al tamaño del robot.
Además, en el campo de las micro y mesotecnologías, este tipo de articulación por cojinetes de bolas o por cojinetes lisos difícilmente se puede poner en práctica debido al tamaño de los dispositivos realizados en este campo.
Con el fin de salvar los problemas de fabricación y de ensamblaje a pequeña escala, se han fabricado articulaciones monobloque. Estas articulaciones monobloque son fáciles de realizar y no hacen necesario ningún ensamblaje, por lo que representan soluciones interesantes desde un punto de vista económico y, por añadidura, permiten evitar los defectos de las estructuras articuladas, en particular el juego y el desgaste.
Sin embargo, este tipo de articulación monobloque presenta el inconveniente de tener un desplazamiento limitado. Además, no están especialmente adaptadas a escala macroscópica para los robots, estando limitado el rendimiento, puesto que parte de la energía sirve para deformar la articulación y tampoco están adaptadas a las interfaces hápticas, ya que las articulaciones se comportan como resortes con múltiples grados de libertad y ofrecen por tanto una resistencia a los desplazamientos a los que se les trata de someter. De este modo, la realimentación no es representativa de la información acerca de la acción efectuada por el dispositivo controlado a distancia.
Para subsanar estos inconvenientes, se ha propuesto realizar articulaciones con zonas adelgazadas, que ofrecen por tanto menor resistencia al movimiento. Sin embargo, estos adelgazamientos acarrean una acritud local. Por otro lado, los desplazamientos no dejan de ser limitados, ya que hay que restringirse al campo elástico del material.
Se conoce asimismo, por el artículo "Stiffness Influence Atlases of a Novel Flexure Hinge-based Parallel Mechanism with Large Workspace", Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robot and Systems, 2-6 de agosto de 2005, Edmonton, Alberta, Canadá, pp. 796-801, un robot paralelo que comprende seis ramas unidas a actuadores base y a una plataforma móvil mediante vástagos de metal unidos al cuerpo adyacente por piezas atornilladas. Sin embargo, los vástagos metálicos utilizados se comportan como resortes y sirven directamente para transmitir esfuerzos. Por otro lado, estos no dejan de ser frágiles.
Se conoce asimismo, por el documento "Innovative Design of Robot and for Space Activities" L. Biagotti y col., 8th. ESA Workshop on Advanced Space Technologies for Robotics and Automation, "ASTRA 2004", ESTEC-Noordwijk, Holanda, 2-4 de noviembre de 2004, una mano robotizada de articulaciones flexibles, estando las articulaciones formadas por resortes en espiral que también ofrecen resistencia al movimiento.
El documento "Development of DOF microfinger", ARAI y col., in Intelligent Robots and System '96, IROS 96n, Proceedings of the 1996 LEEE/RSJ International Conference on Osaka, Japón 4-8 de nov. De 1996, IEEE, vol. 2, páginas 91-97, en el que se basa el preámbulo de la reivindicación 1, describe una articulación puesta en práctica en micromanipuladores y micro-robots que comprenden dos elementos rígidos unidos entre sí mediante dos cables.
En conclusión, determinadas articulaciones de la técnica utilizan un ensamblaje de varios componentes para asegurar la movilidad de una pieza respecto a otra. Es cierto que se obtiene una articulación de calidad, sin embargo ésta es compleja, con un peso y con una ocupación de espacio considerables.
Existen asimismo estructuras flexibles monobloque que no utilizan más que una única pieza, aunque éstas provocan una resistencia al movimiento debida a una rigidez no nula alrededor del eje de articulación que se considere. Por otro lado, el desplazamiento es limitado y éstas adolecen de cierta fragilidad.
Existen asimismo otras articulaciones, de las de resorte, que, por su parte, oponen una resistencia al movimiento y por tanto no están adaptadas a las interfaces hápticas.
Otro inconveniente de las articulaciones de robots o de interfaces hápticas está en que raramente integran una medida de los desplazamientos. Esta medida generalmente se traslada y efectúa en los motores. Esta coubicación de los motores y de la medida permite optimizar los ajustes de los servosistemas. Sin embargo, al estar los motores asociados generalmente a reductores para incrementar los niveles de esfuerzos disponibles, la medida por un giro del motor no permite conocer en el arranque del robot las configuraciones de sus articulaciones, ya que, debido a la desmultiplicación introducida por los reductores, existen varias posiciones articulares que se corresponden con cada posición del codificador dispuesto sobre el motor. Así pues, la medida es relativa y no absoluta. A consecuencia de ello, es necesario inicializar el sistema colocándolo en una configuración de referencia en el arranque, permitiendo reajustar las medidas de desplazamiento con respecto a esta configuración de partida. Este procedimiento ralentiza la puesta en marcha del sistema y perjudica por tanto su ergonomía. Por otro lado, al efectuarse las medidas en los motores, las articulaciones pasivas (no motorizadas) no están equipadas por lo general con sensores de posición. En los robots paralelos, esta ausencia obliga a la resolución de complejos modelos matemáticos para determinar la posición del elemento final del robot en función de las posiciones de las articulaciones.
El documento FR2756028 describe una junta de articulación automotriz y autobloqueante constituida por una banda elástica provista de una placa de tensión y de una capa de material viscoelástico. Esta articulación está diseñada para permitir un paso entre dos posiciones estables y para enclavar la articulación en estas dos posiciones estables. Se trata de una posición estable plegada y de una posición estable desplegada. Pero esta articulación ofrece resistencia a los desplazamientos, por lo que no es "transparente" y, por tanto, no se puede aplicar a las interfaces hápticas.
Por otro lado, este tipo de articulación no permite realizar articulaciones de múltiples posiciones, puesto que la articulación descrita en ese documento no permite más que dos posiciones estables. Además, no integra ningún medio de medida de la posición de la articulación, poniéndose ésta simplemente en una u otra de sus posiciones estables.
Por lo tanto, el objetivo de la presente invención es ofrecer una articulación para miembros articulados de diseño simple, que permite un gran desplazamiento al tiempo que ofrece una importante robustez, y sin oponer más que un débil esfuerzo de resistencia en el momento del accionamiento de la articulación, y que integra medios de medida de su deformación.
La invención tiene asimismo por objetivo proponer la utilización de este tipo de articulación en un robot o una interfaz háptica, lo que permite eludir la fase de inicialización del sistema al tener una medida absoluta de la posición de los cuerpos del robot además de la medida relativa de los movimientos de los motores, obteniéndose esta medida para las articulaciones activas y pasivas, lo que simplifica...
Reivindicaciones:
1. Miembro articulado para robot o interfaz háptica que comprende al menos unos segmentos rígidos primero (2) y segundo (4) y una articulación (6), comprendiendo dicha articulación (6) fibras y estando fijada en cada uno de los segmentos rígidos (2, 4), siendo las fibras, por ejemplo, de aramida, de kevlar o de polipropileno, caracterizado porque la articulación comprende también al menos un elemento (101, 102) de medida.
2. Miembro articulado según la reivindicación precedente, que comprende al menos dos cables (6.1), paralelos entre sí, de los que una dimensión mayor es ortogonal al eje de rotación (YY') de la articulación (6), estando los cables (6.1) solicitados a flexión.
3. Miembro articulado según la reivindicación 1, en el que la articulación (6) comprende una mecha de fibras, comprendiendo dicha mecha, por ejemplo, fibras tejidas.
4. Miembro articulado según la reivindicación 1, en el que la articulación (6) es del tipo cardán, que comprende una cruceta (12) de cuya primera rama (12.1) los extremos se articulan por medio de un cable sobre dos ramas del primer segmento (2) y de cuya segunda rama (12.2) los extremos se articulan por medio de un cable sobre dos ramas del segundo segmento (4).
5. Miembro articulado según la reivindicación 1, en el que la articulación (6) comprende un cable del que una dimensión mayor del cable se extiende a lo largo del eje de rotación (YY') de la articulación, estando el cable solicitado a torsión.
6. Miembro articulado según una cualquiera de las reivindicaciones precedentes, en el que el elemento de medida se materializa en forma de una película delgada (101) de la cual una característica eléctrica varía en función de su deformación.
7. Miembro articulado según la reivindicación 6, en el que el elemento (101) de medida es una película flexible provista de electrodos sobre sus caras superior e inferior y cuya capacidad varía en función de su deformación, o una película flexible provista de electrodos sobre sus caras superior e inferior y cuya resistencia varía en función de su deformación, o una película flexible equipada con galgas extensométricas cuya solicitación varía en función de su deformación.
8. Miembro articulado según la reivindicación 6, en el que el elemento (101) de medida es un polímero conductor cuya resistencia varía en función de su deformación.
9. Miembro articulado según una cualquiera de las reivindicaciones 1 a 5, en el que el elemento de medida se materializa en forma de uno o varios hilos o cables o fibras (l02) de los cuales una característica eléctrica, tal como la capacidad o la resistencia, varía en función de su deformación, y por tanto del ángulo entre los segmentos (2, 4) conectados por la articulación.
10. Miembro articulado según la reivindicación 1 a 5, en el que el elemento de medida (102) es una fibra óptica asociada a un emisor y un receptor de luz y cuya capacidad para transmitir la luz varía en función de su deformación, y por tanto del ángulo entre los segmentos (2, 4) conectados por la articulación, o el elemento de medida se materializa en forma de una o varias antenas colocadas dentro de la estructura de la película que conecta los segmentos (2, 4) y cuyo acoplamiento inductivo varía en función del ángulo entre los segmentos (2, 4) conectados por la articulación.
11. Miembro según una cualquiera de las reivindicaciones 1 a 10, en el que los extremos de la articulación embebidos en la materia comprenden bucles a cuyo través pasa la materia, ventajosamente unos ejes atraviesan los bucles y quedan también embebidos en la materia.
12. Miembro articulado según una cualquiera de las reivindicaciones precedentes, que comprende medios de accionamiento (M) de uno de los segmentos (2, 4) con relación al otro (4, 2).
13. Robot o interfaz háptica que comprende al menos un miembro articulado según una cualquiera de las reivindicaciones 1 a 12.
14. Estructura articulada que comprende una base (30) provista de uno o de dos brazos (32, 34), un soporte móvil (36) en montaje articulado sobre la base (30), formando el soporte móvil (36) con la base (30) un miembro articulado según una cualquiera de las reivindicaciones 1 a 12, un paralelogramo articulado (43) que comprende un brazo (22), una biela (24) paralela al brazo (22) y balancines paralelos primero (26) y segundo (28), articulándose el brazo (22) sobre el soporte móvil (36), formando el brazo (22) y el soporte móvil (36) un miembro articulado según una cualquiera de las reivindicaciones 1 a 12, articulándose el primer balancín (26) sobre el soporte móvil (36) o sobre el brazo (22) y sobre la biela (24), formando el soporte (36) o el brazo (22) y el primer balancín (26), la biela (24) y el primer balancín (26), respectivamente, miembros articulados según una de las reivindicaciones 1 a 12 y articulándose el segundo balancín (28) sobre la biela (24) y sobre el brazo (22), formando el segundo balancín (28) y el brazo (22) un miembro articulado según una cualquiera de las reivindicaciones 1 a 12 y formando el segundo balancín (28) y la biela (24) un miembro articulado según una cualquiera de las reivindicaciones 1 a 12, prolongándose el segundo balancín (28) a fin de formar un antebrazo (50) de maniobra.
15. Robot o interfaz háptica que comprende al menos dos estructuras según la reivindicación 14, situadas sobre un asiento común (B) dispuesto sobre la mano.
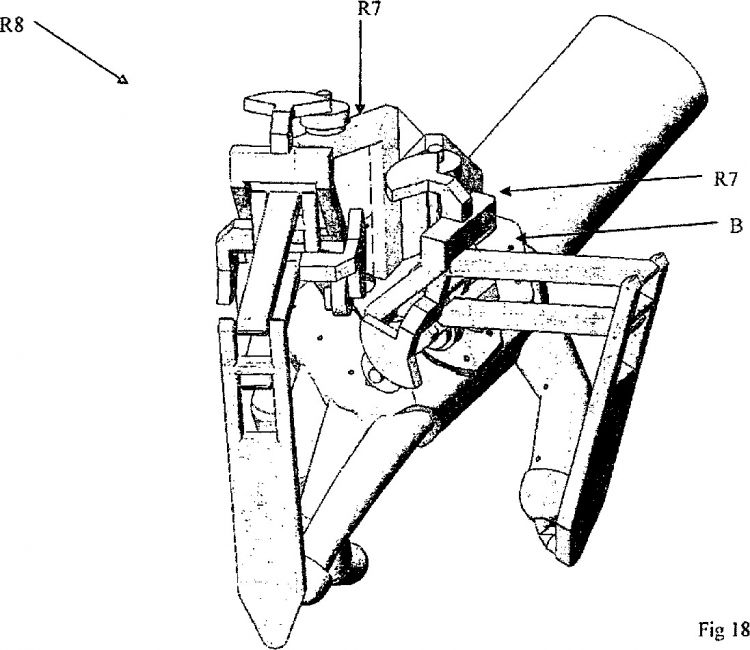
16. Robot o interfaz háptica que comprende dos estructuras según la reivindicación 14, dispuestas mutuamente invertidas, a fin de que los extremos libres de los dos antebrazos (50, 50') de maniobra estén frente a frente, articulándose cada uno de dichos antebrazos (50, 50') sobre un elemento de maniobra (52) por medio de una unión a rótula realizada mediante un cable embebido en los cuerpos adyacentes.
17. Robot o interfaz háptica que comprende dos estructuras según la reivindicación 14, dispuestas una encima de otra, articulándose los extremos libres de los dos antebrazos (50, 50') de maniobra sobre un elemento de maniobra (52) que forma un miembro articulado según la reivindicación 5.
18. Robot o interfaz háptica que comprende tres estructuras según la reivindicación 14, distribuidas angularmente alrededor de un eje en forma regular, estando todos los extremos de los antebrazos (50, 50', 50'') orientados a un mismo lado y llevando éstos una plataforma (60) que lleva un elemento de maniobra (52).
19. Robot que comprende una base (30), sobre la que están dispuestos con capacidad de movimiento tres soportes (36, 36', 36'') aptos para girar alrededor de tres ejes angularmente en forma regular, formando cada soporte (36, 36', 36'') con la base (30) un miembro articulado según una cualquiera de las reivindicaciones 1 a 12, comprendiendo dicho robot tres primeros segmentos (22, 22', 22'') articulados sobre los soportes móviles (36, 36', 36''), formando éste con los mismos unos miembros articulados según una cualquiera de las reivindicaciones 1 a 12, tres segundos segmentos (50, 50', 50'') articulados por un primer extremo respectivamente sobre los tres primeros segmentos (22, 22', 22''), formando dichos segundos segmentos (50, 50', 50'') con dichos primeros segmentos (22, 22', 22'') miembros articulados según una cualquiera de las reivindicaciones 1 a 12, llevando dichos segundos segmentos en su segundo extremo una plataforma (60) que lleva un elemento de maniobra (52).
20. Robot o interfaz háptica según una cualquiera de las reivindicaciones 16 a 19, caracterizado porque el elemento de maniobra es una empuñadura (52) o un dedal (56) destinado a recibir el extremo de un dedo.
Patentes similares o relacionadas:
Guante de exoesqueleto, del 15 de Abril de 2020, de ADJUVO MOTION B.V: Guante de exoesqueleto provisto al menos de un mecanismo de vinculación individual para cada dedo, en el que el mecanismo […]
SISTEMA ROBÓTICO QUIRÚRGICO Y MÉTODO PARA MANEJAR UN SISTEMA ROBÓTICO QUIRÚRGICO, del 28 de Diciembre de 2017, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un sistema robótico quirúrgico que comprende: unidades robóticas, cada una de las cuales es independiente de las demás y comprende un soporte […]
MÉTODO DE MANEJO DE UN SISTEMA ROBÓTICO PARA CIRUGÍA MÍNIMAMENTE INVASIVA, del 28 de Diciembre de 2017, de UNIVERSIDAD DE MALAGA: Método de manejo de un sistema robótico para cirugía mínimamente invasiva que comprende: planificar una posición y orientación de un efector a partir del desplazamiento […]
Método de control para un dispositivo de elevación de equilibrio y un dispositivo de equilibrado de elevación, del 19 de Julio de 2017, de Terex MHPS GmbH: Procedimiento de control para un polipasto de equilibrado que comprende un motor de elevación que puede accionarse por medio de un sistema de control […]
DISPOSITIVO DE REALIDAD AUMENTADA HAPTICO PARA FACILITAR LAS ACCIONES SOBRE UNA PÉRTIGA DE REPOSTAJE EN VUELO, del 30 de Marzo de 2017, de DEFENSYA INGENIERÍA INTERNACIONAL, S.L: Dispositivo de realidad aumentada háptico para facilitar las acciones de control de la pértiga en pleno vuelo, permitiendo el control sobre el boom […]
MÉTODO DE MANEJO DE UN SISTEMA ROBÓTICO PARA CIRUGÍA MÍNIMAMENTE INVASIVA, del 29 de Marzo de 2017, de UNIVERSIDAD DE MALAGA: Método de manejo de un sistema robótico para cirugía mínimamente invasiva que comprende: planificar una posición y orientación de un efector a partir del desplazamiento […]
DISPOSITIVO DE REALIDAD AUMENTADA HAPTICO PARA FACILITAR LAS ACCIONES SOBRE UNA PÉRTIGA DE REPOSTAJE EN VUELO, del 22 de Agosto de 2016, de DEFENSYA INGENIERÍA INTERNACIONAL, S.L: Dispositivo de realidad aumentada háptico para facilitar las acciones sobre una pértiga de repostaje en vuelo. Dispositivo de realidad aumentada háptico para facilitar […]
 Aplicador médico servoasistido, del 6 de Abril de 2016, de WAVELIGHT GMBH: Procedimiento para el posicionamiento de un dispositivo médico con los pasos:
detección de una fuerza que actúa sobre un dispositivo de guía […]
Aplicador médico servoasistido, del 6 de Abril de 2016, de WAVELIGHT GMBH: Procedimiento para el posicionamiento de un dispositivo médico con los pasos:
detección de una fuerza que actúa sobre un dispositivo de guía […]