METODO Y SISTEMA DE INSPECCION RADIOGRAFICA NO INTRUSIVA PARA VEHICULOS QUE UTILIZAN DOS UNIDADES MOVILES DESPLAZABLES DE FORMA AUTONOMA PERO SINCRONICA, UNA LLEVANDO LA FUENTE Y LA OTRA EL DETECTOR.
Método de inspección no intrusiva para el escaneado de vehículos mediante el uso de radiaciones,
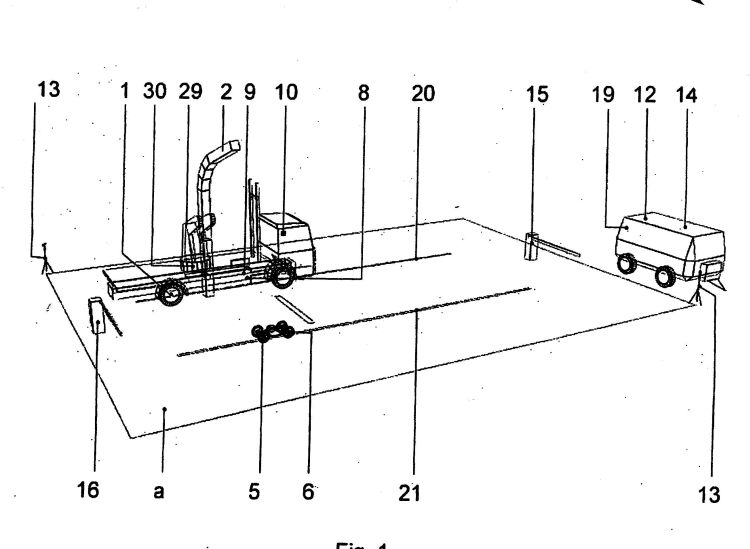
caracterizado por el hecho de que éste comprende las etapas siguientes: - el vehículo es colocado en un lugar marcado, teniendo un acceso a una zona de exclusión a través de un subsistema de gestión del tráfico automatizado que controla automáticamente el funcionamiento de las barreras y de los semáforos de entrada/salida ; - la protección de la zona de exclusión es activada una vez que el conductor del vehículo que debe ser escaneado abandona la zona de exclusión; - el proceso de escaneado es iniciado por comandos remotos a una unidad móvil de escaneado sobre la que está montado un brazo con áreas de detector específicas para el tipo de radiación usado y un robot portador de la fuente móvil; - la fuente de radiación es activada; - el movimiento lento y constante de las dos unidades móviles es iniciado, este movimiento de unidades rectilíneo y uniforme en trayectorias paralelas, que rodean al vehículo escaneado, el robot fuente moviéndose sincronizado con la unidad de escaneado móvil; - el movimiento de las unidades móviles es controlado automáticamente por módulos electrónicos e informáticos, conectados con el centro de control en una red local, a través de radio módems, desde donde éstas reciben comandos, y hacia donde, en tiempo real, envían informaciones del estado y los datos dedicados; - la detención del escaneado es realizada automáticamente en las situaciones siguientes, cuando el brazo del detector ha pasado la extremidad del vehículo escaneado y los detectores reciben el máximo nivel de radiación, al final del periodo de escaneado programado, cuando el limitador de protección del movimiento es activado, cuando no se ha respetado la protección de la zona de exclusión, cuando el sensor de proximidad ha sido activado indicando una distancia peligrosa entre el brazo del detector y el vehículo escaneado, cuando unos obstáculos cerca de las vías de guiado han sido detectados automáticamente por sensores colocados sobre las unidades móviles; - la imagen resultante del escaneado del vehículo es visualizada en el monitor del operador; - al final de la etapa, la protección de la zona de exclusión es desactivada automáticamente, y el vehículo puede abandonar el área de escaneado;
Tipo: Resumen de patente/invención.
Solicitante: S.C. MB TELECOM LTD. - S.R.L.
Nacionalidad solicitante: Rumania.
Dirección: CALEA BUCURESTILOR 3A IIFOV DISTRICT,OTOPENI.
Inventor/es: TUDOR,MIRCEA,SMARANDA BRAESCU STREET 51, SIMA,CONSTANTIN, TUDOR,GHEORGHE, IONESCU,RASVAN,SOLDAT ZAMBILA IONITA STREET 1, GRECHI,CRISTIAN, MIEILICA,EMILIAN, SERBAN,EDUARD, BÎZGAN,ADRIAN, DURALIA,ADRIAN, OANCEA,FLORIN, GHITA,PETRE, SEMENESCU,SERGIU.
Fecha de Publicación: .
Fecha Concesión Europea: 16 de Enero de 2008.
Clasificación PCT:
- G01N23/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 23/00 Investigación o análisis de materiales mediante la utilización de radiaciones de ondas o partículas, p. ej. rayos X o neutrones, no cubiertos por los grupos G01N 3/00 - G01N 17/00, G01N 21/00 o G01N 22/00. › y formando imágenes del material.
- G01V5/00 G01 […] › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › Prospección o detección por medio de radiaciones nucleares, p. ej. de la radioactividad natural o provocada.
Patentes similares o relacionadas:
Procedimiento y aparato para la inspección no destructiva de frutas que tienen un eje de simetría rotacional, del 15 de Julio de 2020, de MICROTEC, S.R.L: Un procedimiento para la inspección no destructiva de una fruta que tiene un eje de simetría rotacional, que comprende los pasos de: […]
Método de diagnóstico y tratamiento, del 10 de Junio de 2020, de INSTITUTO SUPERIOR DE AGRONOMIA: Método para detectar una infección fúngica en una planta leñosa que comprende las etapas de: uso de imágenes tomográficas de rayos X; obtención de una imagen […]
Sistema de inspección radiográfica con contenedor de rechazo, del 3 de Junio de 2020, de Mettler-Toledo, LLC: Sistema de inspección de radiación, que comprende una estructura de soporte y un armario de contención, en donde - el armario […]
Fluorescencia de resonancia nuclear de isótopo dual para la identificación, el ensayo y la adquisición de imágenes de isótopos con fuentes mono energéticas de rayos de gamma, del 22 de Abril de 2020, de LAWRENCE LIVERMORE NATIONAL SECURITY, LLC: Un aparato para la detección de uno de un primer y un segundo isótopo de un material atómico, comprendiendo el aparato: una primera estructura (54; 72; 102'); […]
Dispositivo de adquisición de imágenes de radiación, del 1 de Abril de 2020, de HAMAMATSU PHOTONICS K.K.: Un dispositivo de adquisición de imágenes de radiación que comprende: una fuente de radiación configurada para emitir radiación; un miembro de conversión […]
Sistemas de inspección de tomografía de rayos X, del 4 de Diciembre de 2019, de CXR LIMITED: Sistema de escaneado de rayos X que comprende una fuente de rayos X dispuesta para generar rayos X desde una pluralidad de posiciones de fuente alrededor […]
Control y selección de calidad automatizados, del 13 de Noviembre de 2019, de KATHOLIEKE UNIVERSITEIT LEUVEN: Un método de inspección no destructiva para la inspección en línea de un objeto, comprendiendo el método de inspección no destructiva: - mover usando un sistema […]
Dispositivo de TC y procedimiento del mismo, del 1 de Mayo de 2019, de TSINGHUA UNIVERSITY: Un dispositivo de TC que comprende una unidad de generación de haces de electrones que comprende un cañón de electrones y una unidad de exploración […]