METODO Y APARATO PARA EL RECTIFICADO DE PIEZAS COMPUESTAS.
SE DESCRIBE UN PROCEDIMIENTO PARA RECTIFICAR UNA PIEZA COMPUESTA (18) A FIN DE OBTENER UN COMPONENTE QUE TENGA FORMAS CILINDRICAS CONCENTRICAS (31) Y EXCENTRICAS (30).
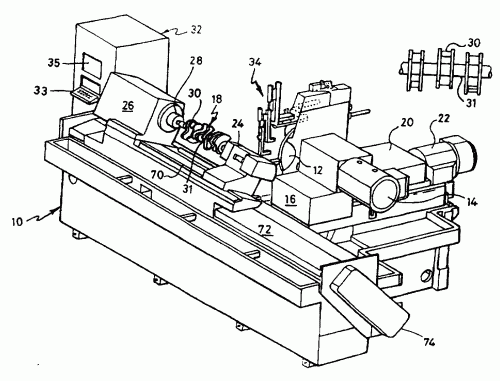
EL PROCEDIMIENTO COMPRENDE MONTAR LA PIEZA (18) EN UNA MAQUINA RECTIFICADORA CONTROLADA POR ORDENADOR (10) QUE TIENE UNA MUELA DE RECTIFICAR (12) CUYO AVANCE Y RETIRADA PUEDE CONTROLARSE POR MEDIO DE UN PROGRAMA INTRODUCIDO EN EL ORDENADOR DE CONTROL (32), LA CARGA EN EL ORDENADOR DE UN PROGRAMA PARA CONTROLAR EL AVANCE LA MUELA, CON POSICIONAMIENTO RELATIVO DE LA MUELA RECTIFICADORA Y DE LA PIEZA PARA ALINEAR LA MUELA CON UNA PRIMERA ZONA SELECCIONADA DE LA PIEZA, EL AVANCE DE LA MUELA RECTIFICADORA EN DIRECCION A LA ZONA SELECCIONADA A FIN DE RECTIFICAR SU SUPERFICIE, EL CONTROL DE AVANCE DE LA MUELA, A FIN DE MANTENER EL CONTACTO RECTIFICADOR ENTRE LA MUELA Y LA PIEZA, A FIN DE RECTIFICAR UNA ZONA CILINDRICA CONCENTRICA DE LA MISMA O UNA ZONA CILINDRICA EXCENTRICA (DESVIADA) DE ELLA, SEGUN SE REQUIERA, ALMACENANDOSE EN EL ORDENADOR INFORMACION SOBRE CADA ZONA SELECCIONADA DE LA PIEZA, Y DIRECCIONANDOSE, SEGUN SEA APROPIADO, DE MANERA QUE PUEDA CONTROLARSE EL AVANCE DE LA MUELA SEGUN QUE LA ZONA DE LA PIEZA SELECCIONADA DEBA RECTIFICARSE EN FORMA DE ZONA CILINDRICA CONCENTRICA O EXCENTRICA (DESVIADA). EL PROCEDIMIENTO PERMITE QUE PUEDAN RECTIFICARSE TANTO LAS ZONAS CILINDRICAS CONCENTRICAS COMO LAS EXCENTRICAS (DESVIADA) DE LA PIEZA CON EL USO DE UNA SOLA RECTIFICADORA BAJO CONTROL DE ORDENADOR, SIN TENER QUE DESMONTAR LA PIEZA DE LA MAQUINA. EL PROCEDIMIENTO COMPRENDE IGUALMENTE LA INTRODUCCION DE PEQUEÑOS MOVIMIENTOS DE AVANCE Y RETRACCION DEL AVANCE DE LA MUELA MIENTRAS ESTA ULTIMA ESTA DEDICADA A RECTIFICAR UNA ZONA CILINDRICA CONCENTRICA DE LA PIEZA, A FIN DE INTRODUCIR EN LA ZONA QUE SE ESTA RECTIFICANDO UNA EXCENTRICIDAD QUE SEA IGUAL Y OPUESTA A CUALQUIER EXCENTRICIDAD QUE LAS FUERZAS DEL PROCESO DE RECTIFICADO INTRODUZCAN EN LA REGION RECTIFICADA, DE MANERA QUE LAS DOS EXCENTRICIDADES SE ANULEN ENTRE SI. SE DESCRIBE UNA MAQUINA RECTIFICADORA CONTROLADA POR ORDENADOR ASI COMO LOS PROGRAMAS PARA CONTROLAR LA MAQUINA.
Tipo: Resumen de patente/invención.
Solicitante: UNOVA U.K. LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: 26, TEMPLE STREET,AYLESBURY, BUCKINGHAMSHIRE HP2.
Inventor/es: CLEWES, STUART, PICKLES, JOHN DAVID.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Abril de 1997.
Fecha Concesión Europea: 5 de Diciembre de 2001.
Clasificación Internacional de Patentes:
- B24B5/42 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B24 TRABAJO CON MUELA; PULIDO. › B24B MAQUINAS, DISPOSITIVOS O PROCEDIMIENTOS PARA TRABAJAR CON MUELA O PARA PULIR (por electroerosión B23H; tratamiento por chorro abrasivo B24C; grabado o pulido electrolítico C25F 3/00 ); REAVIVACION O ACONDICIONAMIENTO DE SUPERFICIES ABRASIVAS; ALIMENTACION DE MAQUINAS CON MATERIALES DE RECTIFICAR, PULIR O ALISAR. › B24B 5/00 Máquinas o dispositivos para trabajar con muela superficies de revolución de piezas, incluyendo aquéllas que trabajan superficies planas adyacentes; Accesorios a este efecto (B24B 11/00 - B24B 21/00 tienen prioridad; máquinas o dispositivos de acabado que utilizan bloques abrasivos animados de un movimiento a la vez axial y rotativo B24B 33/00). › para rectificar cigüeñales o muñequillas de cigüeñales.
- G05B19/18 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control numérico (NC), es decir, máquinas que funcionan automáticamente, en particular máquinas herramientas, p. ej. en un entorno de fabricación industrial, para efectuar un posicionamiento, un movimiento o acciones coordinadas por medio de datos de un programa en forma numérica (G05B 19/418 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Oficina Europea de Patentes, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania, Armenia, Australia, Azerbayán, Bosnia y Herzegovina, Barbados, Bulgaria, Brasil, Bielorusia, Canadá, China, República Checa, Estonia, Georgia, Ghana, Hungría, Israel, Islandia, Japón, Kenya, Kirguistán, República de Corea, Kazajstán, Santa Lucía, Sri Lanka, Liberia, Lesotho, República del Moldova, Madagascar, Mongolia, Malawi, México, Noruega, Nueva Zelanda, Polonia, Federación de Rusia, Sudán, Singapur, Eslovaquia, Tayikistán, Turkmenistán, Turquía, Trinidad y Tabago, Ucrania, Uganda, Estados Unidos de América, Urbekistán, Viet Nam, Burkina Faso, Benin, República Centroafricana, Congo, Costa de Marfil, Camerún, Gabón, Guinea, Malí, Mauritania, Niger, Senegal, Chad, Togo, Cuba, República Popular Democrática de Corea, Organización Regional Africana de la Propiedad Industrial, Swazilandia, Organización Africana de la Propiedad Intelectual, Organización Eurasiática de Patentes.
Patentes similares o relacionadas:
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Dispositivo limitador de arranque y máquina herramienta, del 9 de Octubre de 2019, de CITIZEN WATCH CO. LTD.: Dispositivo limitador de arranque que comprende: una unidad de prohibición de arranque configurada para prohibir el arranque de un […]
Robot oruga y plataforma de soporte, del 15 de Mayo de 2019, de THE BOEING COMPANY: Aparato que comprende un sistema de oruga y un robot oruga, comprendiendo el robot oruga: un primer sistema de movimiento configurado para […]
Dispositivo de presión giratorio que permite un control eléctrico y método de control para el mismo, del 17 de Abril de 2019, de Rimscience Co., Ltd: Un dispositivo de presión giratorio controlable eléctricamente, que comprende: un medio de presión giratorio para ser introducido en una estructura […]
Procedimiento y dispositivo para la generación de datos de control para la configuración de un flanco dentado a través de mecanización fresada de una pieza de trabajo en una máquina herramienta, del 7 de Febrero de 2019, de DECKEL MAHO PFRONTEN GMBH: Procedimiento para la generación de datos de control para la configuración de un flanco dentado a través de mecanización fresada de una pieza de trabajo en una máquina […]
Dispositivo de orientación para vehículos de transporte accionados eléctricamente y guiados automáticamente en naves industriales, del 4 de Febrero de 2019, de GRENZEBACH MASCHINENBAU GMBH: Dispositivo de orientación para vehículos de transporte accionados eléctricamente y guiados automáticamente en naves industriales, especialmente los así llamados AGV […]
Procedimiento de ajuste del consumo de energía de dos herramientas durante el mecanizado de extremos de secciones de tubo, del 16 de Enero de 2019, de Rattunde AG: Procedimiento de mecanizado de una sección de perfil largo que tiene una longitud real (L1) y un primer y un segundo extremo (3, 3'), donde […]
MÁQUINA PARA EL MECANIZADO POR CONTROL NUMÉRICO DE PANELES DE MADERA, PLÁSTICO Y MATERIALES SIMILARES, DEL TIPO QUE ES SUSCEPTIBLE DE USAR UN SISTEMA DE TRABAJO ¿NESTING¿, del 28 de Septiembre de 2017, de RIERGE, S.A.: 1. Máquina para el mecanizado por control numérico de paneles de madera, plástico y materiales similares, del tipo que es susceptible de usar […]