METODO Y SISTEMA DE VISION ARTIFICIAL PARA MEDIDA DE LOS MOVIMIENTOS DE CUERPOS FLOTANTES EN UN LIQUIDO Y DE LA SUPERFICIE LIBRE DE ESTE.
Método y sistema de visión artificial para medida de los movimientos de cuerpos flotantes en un líquido y de la superficie libre de éste.
La presente invención se refiere a un método y a un sistema de visión artificial para medición de movimientos en ensayos de modelos físicos en un canal de oleaje, capaces de distinguir diferentes líquidos u objetos dentro del área de grabación, de una manera no intrusiva y realizando las mediciones y muestra de resultados en tiempo real. El método de medición de movimientos de la invención comprende las siguientes etapas: (a) calibración del sistema de visión artificial, (b) captación de una imagen del objeto cuyo movimiento se desea medir, (c) detección de la posición del objeto cuyo movimiento se desea medir y (d) obtención de los valores de elevación
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200801412.
Solicitante: UNIVERSIDADE DA CORUÑA.
Nacionalidad solicitante: España.
Provincia: A CORUÑA.
Inventor/es: RIVERO CEBRIAN,DANIEL, IBAÑEZ PANIZO,OSCAR, RABUÑAL DOPICO,JUAN RAMON, PEDREIRA SOUTO,NIEVES, DORADO DE LA CALLE,JULIAN, CASTRO PONTE,ALBERTO, IGLESIAS RODRIGUEZ,GREGORIO, PORTO PAZOS,ANA BELEN, PAZOS SIERRA,ALEJANDRO, PEREIRA LOUREIRO,JAVIER.
Fecha de Solicitud: 8 de Mayo de 2008.
Fecha de Publicación: .
Fecha de Concesión: 24 de Mayo de 2011.
Clasificación Internacional de Patentes:
- G01P5/00A
- G01P5/00C
Clasificación PCT:
- G01F23/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01F MEDIDA DEL VOLUMEN, FLUJO VOLUMETRICO, FLUJO MASICO O NIVEL DE LIQUIDOS; DOSIFICACION VOLUMETRICA. › Indicación o medida del nivel de líquidos o materiales sólidos fluyentes, p. ej. indicación en términos de volumen, indicación por medio de una señal de alarma.
- G01P5/00 G01 […] › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › Medida de la velocidad de los fluidos, p. ej. de una corriente atmosférica; Medida de la velocidad de los cuerpos, p. ej. buques, aeronaves, en relación con los fluidos (aplicación de dispositivos de medida de la velocidad a la medida del volumen de los fluidos G01F).
Fragmento de la descripción:
Método y sistema de visión artificial para medida de los movimientos de cuerpos flotantes en un líquido y de la superficie libre de éste.
La presente invención se refiere a un método y a un sistema de visión artificial, capaces de distinguir diferentes líquidos u objetos dentro del área de grabación en un canal de generación de oleaje, de una manera no intrusiva y realizando las mediciones y muestra de resultados en tiempo real. Con esta capacidad, se pueden realizar mediciones de los desplazamientos de la superficie libre así como de los desplazamientos lineales y los giros de un cuerpo flotante.
El sistema de visión artificial de la presente invención tiene aplicación en una variedad de contextos, entre los que destacan:
• Estudio de comportamiento y diseño de barreras de contención de hidrocarburos.
• Diseño de diques.
• Estudio de la reflexión del oleaje en diques y barreras de contención de hidrocarburos.
• Desarrollo de sistemas marinos que necesiten mediciones de la altura del agua u otro líquido, o mezcla de líquidos.
Antecedentes de la invención
En los ensayos de modelos físicos en canal de oleaje es necesario medir los desplazamientos de la superficie libre. Además, en los ensayos de modelos flotantes, como una barrera de contención de hidrocarburos, es preciso medir los desplazamientos lineales y los giros del modelo.
Los sistemas de medida del desplazamiento de la superficie libre que se utilizan en los laboratorios de Ingeniería Marítima se basan habitualmente en sensores de conductividad o capacitivos (ver patente número US4674329). Estos sistemas presentan una serie de inconvenientes:
• Los sensores han de introducirse en el agua, lo que produce una perturbación en el flujo y altera el comportamiento del ensayo.
• Miden los desplazamientos verticales de la superficie libre en un número limitado de puntos del canal (tantos como sensores), en consecuencia se requieren tantos sensores como mediciones puntuales se quieran hacer, lo que se traduce en un mayor coste y una mayor dedicación en tiempo (calibrado y colocación). Además, dado que dichos sensores perturban las olas, el número máximo de sensores que pueden colocarse es limitado.
• No permiten conocer la posición de la interfaz entre dos líquidos, por ejemplo entre un contaminante y el agua.
• Los sensores requieren una calibración periódica, manual e individual.
• Son sensibles a la temperatura y a la conductividad del agua.
Como una alternativa a los sistemas que emplean sensores de conductividad, se han desarrollado sistemas de visión artificial que, si bien resuelven parcialmente los problemas mencionados anteriormente, presentan a su vez algunos inconvenientes:
• No permiten detectar la interfaz entre dos líquidos ni objetos que se encuentren flotando en los mismos.
• Los sistemas de visión artificial concebidos con el único objetivo de medir los desplazamientos de la superficie libre, son también intrusivos, ya que necesitan teñir el agua.
Un primer objeto de la presente invención es paliar los inconvenientes antes mencionados que presentan los sistemas del estado de la técnica a la hora de medir los desplazamientos de la superficie libre. Un segundo objeto de la invención es proporcionar un mecanismo capaz de distinguir diferentes fluidos y cuerpos, así como de medir el desplazamiento de los mismos.
Descripción de la invención
Estos y otros objetos de la presente invención se consiguen mediante un método de medición de movimientos en tiempo real según la reivindicación independiente 1 para ensayos de modelos físicos en un canal de oleaje y un sistema de visión artificial para medición de movimientos en tiempo real según la reivindicación independiente 17.
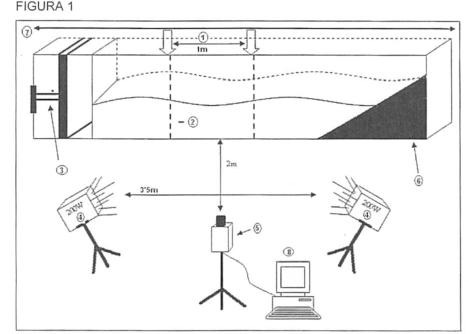
El método y sistema de visión artificial de la presente invención se basan en la grabación del movimiento del oleaje en un canal de experimentación de oleaje, con unos medios de captura de imágenes, y a partir de ahí, realizar diferentes mediciones, empleando unos medios de procesamiento.
Al contrario que otros sistemas y métodos comprendidos en el estado de la técnica, el método y sistema de visión artificial de la presente invención presentan la ventaja de ser no intrusivos, por lo que no alteran el comportamiento del ensayo.
En un primer aspecto de la invención se proporciona un método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje, que comprende las etapas de calibrar el sistema, captar la imagen del objeto cuyo movimiento se desea medir, detectar la posición del objeto cuyo movimiento se desea medir y obtener valores de elevación.
A lo largo del presente documento el objeto cuyo movimiento se desea medir denotará por igual la superficie libre de un líquido en ausencia de cuerpos flotantes, la interfaz entre dos líquidos o un cuerpo flotante, por ejemplo una barrera de contención de hidrocarburos o una boya.
Para captar la imagen del objeto cuyo movimiento se desea medir pueden emplearse medios de captación de imágenes convencionales, que consisten en una videocámara en una realización preferida de la invención. Los píxeles de resolución de los medios de captación de imágenes y la frecuencia de registro de imágenes tienen relevancia en la resolución y en la precisión de la medición obtenida según el método de la invención.
Ventajosamente, mediante el método de la invención, se realizan multitud de mediciones simultáneas, tantas como píxeles tengan de ancho las imágenes captadas.
Como se ha mencionado anteriormente, uno de los objetos de la presente invención es la medición del movimiento de la superficie libre de un líquido o de la interfaz entre un primer líquido y un segundo líquido. En este caso, en una realización preferida del método de la invención la etapa de detectar la posición del objeto comprende realizar un realzado previo de la imagen, centrándose en una de las bandas de color RGB, realizar una binarización, preferentemente mediante una umbralización adaptativa, y obtener una red de puntos mediante un gradiente morfológico. Opcionalmente, previamente a la realización del gradiente morfológico se puede eliminar el ruido de la imagen mediante operadores morfológicos de apertura y cierre, lo que asegura un mejor funcionamiento en circunstancias con mayor ruido. La información obtenida en estas fases se emplea para guiar un algoritmo de seguimiento de bordes.
Siguiendo en el caso de la medición del movimiento de la superficie libre de un líquido o de la interfaz entre dos líquidos, una realización preferida para la etapa de obtener los valores de elevación comprende calcular el número de píxeles entre un nivel de referencia y la interfaz líquido-aire y/o entre un nivel de referencia y la interfaz primer líquido-segundo líquido y convertir el número de píxeles en unidades de longitud.
El nivel de referencia puede ser el fondo del canal de oleaje o cualquier otro nivel señalado y situado a una distancia conocida respecto del fondo del canal. Cuando el nivel de referencia es distinto del fondo del canal, la etapa anterior puede comprender la fase adicional de sumar la distancia entre el nivel de referencia y el fondo del canal para determinar el valor de elevación absoluto.
En el caso de la medición del movimiento de un cuerpo flotante, el método de la invención comprende en una realización preferida la etapa adicional de dotar al cuerpo de al menos una marca, preferentemente dos, que resulte visible en las imágenes. En esta realización la etapa de detectar la posición del objeto cuyo movimiento se desea medir comprende calcular la posición y ángulo de inclinación del cuerpo flotante.
En una realización la posición y el ángulo de inclinación del cuerpo flotante se obtienen a partir de la determinación del píxel central de dos marcas realizadas en el objeto flotante.
Como una etapa previa al proceso de medición propiamente dicho se requiere una calibración del sistema de medición, para calibrar correctamente la videocámara en base a su posición y a los defectos de su lente, así como la correspondencia entre píxeles y unidades de longitud.
En una realización preferida la etapa de calibrar...
Reivindicaciones:
1. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje, que comprende las siguientes etapas:
(a) calibrar el sistema de visión artificial,
(b) captar una imagen del objeto cuyo movimiento se desea medir,
(c) detectar la posición del objeto cuyo movimiento se desea medir,
(d) obtener valores de elevación.
2. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 1, caracterizado porque la etapa de calibrar el sistema de visión artificial comprende las siguientes fases:
(a) filmar una plantilla de calibración,
(b) calcular una matriz de calibración,
(c) calcular la correspondencia entre píxeles y unidades de distancia.
3. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 1, caracterizado porque el objeto cuyo movimiento se desea medir es la superficie libre de un líquido o la interfaz entre dos líquidos.
4. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 3, caracterizado porque la etapa de detectar la posición del objeto cuyo movimiento se desea medir comprende las siguientes fases:
(a) realzado de la imagen,
(b) binarización de la imagen,
(c) detección de bordes.
5. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 4, caracterizado porque la fase de realzar la imagen comprende eliminar capas de color para obtener una imagen monocolor.
6. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 4, caracterizado porque la fase de binarización de la imagen se realiza mediante la umbralización adaptativa de Otsu.
7. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 4, caracterizado porque la fase de detección de bordes comprende:
(a) obtener una red de puntos,
(b) realizar un seguimiento de bordes.
8. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 7, caracterizado porque la red de puntos se obtiene mediante la aplicación de un gradiente morfológico.
9. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 7, caracterizado porque la etapa de seguimiento de bordes para determinar a partir de un píxel n de un borde el píxel siguiente n+1 del borde comprende las siguientes fases:
(a) seleccionar los tres píxeles vecinos del píxel n a la derecha, a saber, diagonal derecha superior, derecha y diagonal derecha inferior;
(b) calcular para cada uno de los píxeles vecinos seleccionados en (a) la suma ponderada de los siguientes parámetros:
(c) escoger como el píxel n+1 del borde aquél de entre los píxeles vecinos seleccionados que presenta un valor mayor de la suma ponderada calculada en (b).
10. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 4, caracterizado porque la etapa de detectar la posición del objeto cuyo movimiento se desea medir comprende entre las fases (b) y (c) una fase adicional de eliminación de ruido.
11. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 10, caracterizado porque la fase adicional de eliminación de ruido comprende el uso de operadores morfológicos de apertura y cierre.
12. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 3, caracterizado porque la etapa de obtener los valores de elevación comprende las siguientes fases:
(a) calcular el número de píxeles entre un nivel de referencia y la interfaz líquido-aire o entre un nivel de referencia y la interfaz primer líquido-segundo líquido,
(b) transformar el número de píxeles en unidades de longitud.
13. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 12, caracterizado porque la etapa de obtener los valores de elevación comprende adicionalmente sumar la distancia entre el nivel de referencia y el fondo del canal de oleaje.
14. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 1 caracterizado porque el objeto cuyo movimiento se desea medir es un cuerpo flotante.
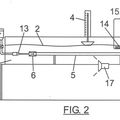
15. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 14 caracterizado porque la etapa de detectar la posición del objeto cuyo movimiento se desea medir comprende dotar al objeto flotante de al menos una marca (9).
16. Método de medición de movimientos en tiempo real para ensayos de modelos físicos en un canal de oleaje según reivindicación 15, caracterizado porque la etapa de obtener valores de elevación comprende calcular la posición y ángulo de inclinación del cuerpo flotante a partir de la determinación del píxel central de dos marcas (9).
17. Sistema de visión artificial para medición de movimientos en tiempo real para ensayos de modelos físicos, que comprende:
(a) un canal de oleaje;
(b) medios de iluminación;
(c) medios de captura de imágenes; y
(d) medios de procesamiento de imágenes,
caracterizado porque está adaptado para implementar las etapas del método de cualquiera de las reivindicaciones 1-16.
Patentes similares o relacionadas:
 SONDAS DE LAMINA DE LUZ PLANAS, del 26 de Febrero de 2010, de THE UNIVERSITY OF NOTTINGHAM: Un conjunto de sonda de medición de flujo de fluido endoscópica óptica que comprende un endoscopio que tiene un extremo de usuario y un extremo distal , […]
SONDAS DE LAMINA DE LUZ PLANAS, del 26 de Febrero de 2010, de THE UNIVERSITY OF NOTTINGHAM: Un conjunto de sonda de medición de flujo de fluido endoscópica óptica que comprende un endoscopio que tiene un extremo de usuario y un extremo distal , […]
 EQUIPO PARA REGULACION Y VISUALIZACION DE TRANSICION ENTRE REGIMENES LAMINAR Y TURBULENTO DE UN FLUIDO, del 25 de Febrero de 2010, de UNIVERSIDAD POLITECNICA DE MADRID: Equipo para regulación y visualización de transición entre regímenes laminar y turbulento de un fluido.
Se propone un sistema didáctico experimental para […]
EQUIPO PARA REGULACION Y VISUALIZACION DE TRANSICION ENTRE REGIMENES LAMINAR Y TURBULENTO DE UN FLUIDO, del 25 de Febrero de 2010, de UNIVERSIDAD POLITECNICA DE MADRID: Equipo para regulación y visualización de transición entre regímenes laminar y turbulento de un fluido.
Se propone un sistema didáctico experimental para […]
Tanque de almacenamiento que tiene un sistema de medición activo de barras de soporte, del 8 de Julio de 2020, de Avtechtyee, Inc: Un sistema de medición para un tanque , estando el tanque configurado para contener material recibido de un sistema de avión; el sistema de medición […]
DISPOSITIVO SENSOR Y SISTEMA PARA LA MEDICIÓN EN LÍNEA DE LA VELOCIDAD DE GAS SUPERFICIAL, PROFUNDIDAD DE ESPUMA, DENSIDAD APARENTE Y HOLDUP EN CELDAS DE FLOTACIÓN, del 2 de Julio de 2020, de UNIVERSIDAD CATÓLICA DEL NORTE: La presente invención se relaciona al campo de los dispositivos de medición, más específicamente a los dispositivos de medición de presión y flujo, así […]
SISTEMA PARA MEDIR ALTURA DE LÍQUIDOS INMISCIBLES EN UNA MEZCLA NO DISPERSA, del 2 de Julio de 2020, de UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA: La presente invención se relaciona, sin limitarse a estos, con el campo de los procesos hidrometalúrgicos de extracción de materiales, en específico […]
Método y sistema para controlar y comunicar la velocidad de llenado de un contenedor, del 10 de Junio de 2020, de Enevo Oy: Un método para controlar la velocidad de llenado de un contenedor y comunicar la velocidad de llenado controlada a un servidor , el contenedor comprende […]
Configuración y parametrización específica al cliente de aparatos de medición de nivel de llenado durante el proceso de pedido, del 4 de Marzo de 2020, de VEGA GRIESHABER KG: Sistema de parametrización del aparato de medición de nivel de llenado para la disposición de grupos constructivos de un aparato de medición de nivel de llenado […]
Sistema para medir el nivel de material a granel seco en un contenedor, del 19 de Febrero de 2020, de OSBORNE INDUSTRIES, INC.: Sistema para medir un nivel de material a granel seco en un contenedor , comprendiendo dicho sistema: un dispositivo columnar adaptado para ser soportado verticalmente […]