MÉTODO Y SISTEMA DE GUIADO MEDIANTE CONTROL POR DERIVADA.
Método y sistema de guiado de aplicación al control de variables de procesos monovariables o multivariables,
con parámetros conocidos o desconocidos y variables con el tiempo. El sistema de guiado de la presente invención genera una trayectoria deseada para una variable de salida del proceso y, a partir de dicha trayectoria deseada, calcula una consigna para la variable derivada de dicha variable de salida del proceso. Dicha consigna es entonces aplicada a un controlador avanzado basado en modelo de dicha variable derivada y la acción de control generada por dicho controlador avanzado basado en modelo es aplicada al proceso y guía su evolución de forma que dicha variable de salida del proceso converge hacia dicha trayectoria deseada.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131113.
Solicitante: UNIVERSIDAD NACIONAL DE EDUCACION A DISTANCIA..
Nacionalidad solicitante: España.
Inventor/es: MARTIN SANCHEZ,JUAN MANUEL, VIUDEZ MOREIRAS,Daniel, NEVADO REVIRIEGO, Antonio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B13/02 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00). › eléctricos.
- G05B13/04 G05B 13/00 […] › que implican el uso de modelos o de simuladores.
Fragmento de la descripción:
Método y sistema de guiado mediante control por derivada La presente invención recae en un método y sistema de guiado mediante control por derivada y será de utilidad en áreas tales como la aeronáutica, la naval, la nuclear, la de automoción y, en general, en las diversas áreas industriales.
ANTECEDENTES DE LA INVENCION
La presente invención está relacionada con un método y sistema de guiado para controlar variables de procesos mono o multivariables por medio del control de sus variables derivadas de tal forma que el rendimiento de control obtenido para dichas variables de proceso mejora significativamente para el rango de frecuencias de control altas o, equivalentemente, para el rango de períodos de control pequeños con respecto a la dinámica del proceso.
Este sistema de guiado será de utilidad en áreas tales como la aeronáutica, la naval, la nuclear, la de automoción y, en general, en las diversas áreas industriales. Ejemplos de procesos en los que el sistema de guiado puede ser aplicado son el del control del ángulo de cabeceo de un avión actuando sobre la posición del elevador, y el del control del ángulo de balanceo de un buque actuando sobre las correspondientes aletas estabilizadoras.
Es conocido que los Controladores Avanzados Basados en Modelo utilizan una relación causa-efecto o modelo predictivo del proceso para predecir la evolución de las variables de salida del mismo. La fiabilidad de dicha predicción depende del valor de los parámetros de dicho modelo predictivo. Algunas soluciones requieren obtener el modelo predictivo previamente a su utilización en el sistema de control, este es el caso de las denominadas técnicas de Control Predictivo Basado en Modelo.
Para tener en cuenta la naturaleza variable con el tiempo de los procesos, otras soluciones denominadas Adaptativas generan el modelo predictivo en tiempo real al mismo tiempo que dicho modelo es utilizado para controlar el proceso en cuestión, de tal manera que los cambios experimentados en la dinámica del proceso pueden ser rápidamente incorporados al modelo predictivo por medio de un mecanismo de adaptación o por un cambio en el dominio de operación. Este es el caso de los Controladores Adaptativos Predictivos (Patentes USA Nos. 4, 197, 576 y 4, 358, 822) y de los Controladores Adaptativos Predictivos Expertos (patente USA No. US 6, 662, 058 B1) .
En ambos casos, el valor de los parámetros del modelo predictivo depende del período de control. Por ello la elección del período de control debe de ser la adecuada para que el rango en el que pueden variar los parámetros del modelo predictivo permita predecir satisfactoriamente la evolución de la variable de proceso bajo control. Es sabido que la elección del período de control por debajo de un cierto límite, que denominaremos “umbral de modelización”, cuyo valor es relativamente pequeño con respecto al tiempo de la respuesta natural de la variable del proceso bajo control, hace que algunos valores de los parámetros del modelo predictivo, que sopesan el efecto de las acciones de control al proceso sobre sus variables de salida, se acerquen a cero excesivamente. Ello hace que dichos parámetros aumenten su sensibilidad a cualquier pequeño error de identificación en los mismos y, en consecuencia, el utilizar el valor de dichos parámetros en la predicción de la evolución de la salida del proceso bajo control y en el cálculo de la señal de control, puede deteriorar significativamente el rendimiento del controlador.
Sin embargo, la aplicación práctica de un sistema de control para una cierta variable de un proceso puede en muchos casos requerir la utilización de períodos de control inferiores al mencionado umbral de modelización y, en consecuencia, el rendimiento de controladores avanzados basados en modelo, adaptativos o no, puede deteriorarse significativamente en el rango de dichos períodos de control. Por ejemplo, el período de control adecuado en la aplicación de un controlador avanzado basado en modelo para el ángulo de cabeceo de un avión, actuando sobre la posición del elevador, no debería ser inferior a la décima de segundo y, sin embargo, el período de control requerido tiene que ser inferior a las 5 centésimas de segundo para asegurar la integridad del piloto humano.
El sistema de guiado de la presente invención permite el uso de períodos de control por debajo del mencionado umbral de modelización mejorando para dichos periodos de control el rendimiento del sistema de control obtenido por la aplicación directa de controladores avanzados basados en modelo.
BREVE DESCRIPCIÓN DE LA INVENCION
El sistema de guiado de la presente invención utiliza un calculador digital, un bloque de guiado y un controlador avanzado basado en modelo, para guiar la evolución de una variable de salida de un proceso a través de su variable derivada, de forma que el bloque de guiado genera una trayectoria deseada para dicha variable de salida y asimismo, a partir de dicha trayectoria deseada, calcula una consigna para dicho controlador avanzado basado en modelo, cuya acción de control guía dicha variable derivada hacia dicha consigna y, como consecuencia, dicha variable de salida converge hacia la mencionada trayectoria deseada, todo ello ejecutando un número de operaciones simples y específicas en cada instante de control.
BREVE DESCRIPCIÓN DE LAS FIGURAS
La aplicación de la invención será descrita primero de manera general y, posteriormente, los resultados de una aplicación particular serán mostrados, todo ello con la ayuda de las siguientes figuras:
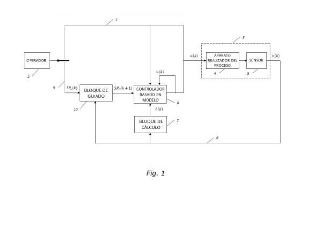
La FIG.1 muestra un esquema de la estructura general y conceptual del sistema de guiado.
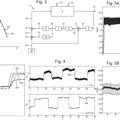
La FIG. 2 ilustra por medio de un ejemplo conceptual la evolución de una variable de salida del proceso que sigue la trayectoria de salida generada por un bloque de guiado y el cálculo, por el mismo bloque de guiado, del valor de consigna para la correspondiente variable derivada.
La FIG.3a muestra los resultados de un experimento en el que el sistema de guiado se aplicó al control del ángulo de cabeceo de una simulación de un avión. En esta aplicación particular el bloque de guiado, cuya operación se ha ilustrado en la FIG. 2, ha sido utilizado conjuntamente con un controlador adaptativo predictivo por el sistema de guiado.
La FIG. 3b muestra los resultados de un experimento similar al de la FIG. 3a, pero en el que el mismo controlador adaptativo predictivo utilizado por el sistema de guiado fue directamente aplicado al ángulo de cabeceo de la misma simulación de un avión en el mismo contexto considerado en la FIG. 3a, con el fin de evaluar comparativamente el rendimiento del sistema de guiado.
DESCRIPCIÓN DETALLADA DE LA INVENCION
En cada instante de control k, el operador puede optar por aplicar control manual al proceso o por aplicar control automático, ambos modos de actuación están representados en la FIG. 1 y se describen a continuación.
1. Control manual: Bajo control manual, el operador (2) aplica directamente la acción de control
al aparato (4) que realiza el proceso que se desea controlar y al controlador avanzado basado en modelo (8) a través del
camino (1) . Un sensor (5) asociado al aparato (4) mide la variable de salida del proceso que se desea controlar. Esta variable de salida del proceso es aplicada, como se muestra a través del camino (6) , a un bloque de cálculo (7) y al bloque de guiado (10) . El bloque (7) calcula el incremento entre dos instantes de
control consecutivos, k-1 y k, de la variable
y a partir de este incremento genera la denominada variable derivada que se aplica como variable de proceso a controlar en el controlador avanzado basado en modelo (8) . De esta forma, bajo control manual, el controlador avanzado basado en modelo (8) puede operar en el modo de identificación descrito para este tipo de controlador en las patentes USA Nos. 4, 197, 576, 4, 358, 822 y US 6, 662, 058 B1.
2. Control automático: Bajo control automático, el operador (2) aplica al bloque de guiado (10) el valor deseado de
consigna para la variable de salida , como muestra el camino (9) . Asimismo, el bloque de guiado (10) recibirá la medida de la variable
desde el sensor (5) como muestra el camino (6) . A partir del valor de la variable de proceso y su valor de consigna , el bloque de guiado (10) genera el valor de consigna
para la variable derivada . A partir del valor de consigna para la variable derivada y la variable derivada , el controlador avanzado basado en modelo (8) , operando en modo automático, calcula la acción de control a aplicar al aparato (4) que realiza el proceso.
Las operaciones específicas...
Reivindicaciones:
Lo que se reivindica es:
1. Un método de guiado mediante control por derivada para generar una variable de control en cada uno de una pluralidad de instantes de control k, dicha variable de control será aplicada a un aparato que realiza un proceso con al menos una variable de entrada y al menos una variable de salida, dicho aparato variando una de dichas al menos una variable de entrada de acuerdo con el valor de dicha variable de control, dicho método guiando la variable de salida hacia una consigna de salida, dicho método caracterizado por incluir las siguientes etapas:
(A) Generar una variable derivada a partir de dicha variable de salida;
(B) Genera una trayectoria deseada futura para conducir dicha variable de salida hacia dicha consigna de salida con una dinámica deseada;
(C) Calcular a partir de dicha trayectoria deseada una consigna derivada para dicha variable derivada;
(D) Utilizar un controlador avanzado basado en modelo de dicha variable derivada para calcular dicha variable de control que conducirá dicha variable derivada a su consigna derivada y, como consecuencia, dicha variable de salida hacia dicha trayectoria deseada.
(E) Aplicar dicha variable de control de forma que dicho aparato varíe una de dichas al menos una variable de entrada de manera acorde.
2. Método de guiado mediante control por derivada según la reivindicación 1, caracterizado porque al menos una variable de entrada define un vector de entrada, al menos una variable de salida define un vector de salida, la variable de control es sustituida por un vector de control, la consigna de salida es sustituida por un vector de consigna de salida, la variable derivada es sustituida por un vector derivado y el controlador avanzado basado en modelo es sustituido por un controlador avanzado multivariable basado en modelo, generando cada una de las componentes del vector derivado a partir de cada una de las correspondientes componentes de dicho vector de salida de acuerdo con la etapa (A) , calculándose para cada una de las componentes de dicho vector de salida una futura trayectoria deseada y para cada una de las componentes de dicho vector derivado una consigna derivada de acuerdo con las etapas (B) y (C) , utilizando dicho controlador avanzado multivariable basado en modelo para calcular, a partir de las componentes del vector derivado y de sus correspondientes consignas derivadas, el vector de control de acuerdo con la etapa (D) y variando dicho aparato el vector de entrada teniendo en cuenta dicho vector de control de acuerdo con la etapa (E) .
3. Método de guiado mediante control por derivada según la reivindicación 2, caracterizado porque las etapas (B) y (C) actualizan la trayectoria deseada para cada una de las componentes del vector de salida y la consigna derivada para cada una de las componentes del vector derivado en instantes de control separados por un período de actualización que es un múltiplo del período de control.
4. Método de guiado mediante control por derivada según la reivindicación 3, caracterizado porque la trayectoria deseada, para cada una de las componentes del vector de salida, queda determinada por un incremento de aproximación a la correspondiente consigna en el siguiente periodo de actualización cuando dicha componente del vector de salida se encuentra fuera de un entorno de su correspondiente componente del vector de consigna de salida, y el incremento de aproximación se reduce progresivamente cuando la componente del vector de salida se aproxima a su correspondiente componente del vector de consigna de salida dentro de dicho entorno.
5. Un sistema de guiado mediante control por derivada para controlar durante una pluralidad de instantes de control k un proceso que tiene al menos una variable de entrada y al menos una variable de salida, al menos una de dichas variable de entrada definiendo un vector de entrada, al menos una de dichas variable de salida definiendo un vector de salida, dicho sistema de guiado generando un vector de control para conducir dicho vector de salida hacia un vector de consigna de salida, caracterizado por comprender:
a. Un bloque de cálculo que responde al vector de salida generando un vector derivado.
b. Un bloque de guiado que responde: (i) a dicho vector de salida y a dicha vector de consigna de salida generando una trayectoria deseada para cada una de las componentes de dicho vector de salida, dicho conjunto de salidas deseadas conduciendo dicho vector de control hacia dicho vector de consigna de salida con la dinámica deseada, y (ii) a cada una de dichas trayectorias deseadas generando un valor de consigna para cada una de las correspondientes componentes de dicho vector derivado.
c. Un controlador avanzado multivariable basado en modelo que responde a dichas componentes del vector derivado y a sus correspondientes valores de consigna generando un vector de control que debe aplicarse en cada instante de control k variando dicho vector de entrada para conducir dichas componentes del vector derivado a sus respectivos valores de consigna y, como consecuencia, dichos componentes del vector de salida hacia sus correspondientes salidas deseadas.
Fig. 1 Fig. 2
Patentes similares o relacionadas:
Puesta en servicio automática de controlador para convertidores electrónicos de potencia activos trifásicos, del 1 de Julio de 2020, de OTIS ELEVATOR COMPANY: Un sistema para modular un nivel de corriente de salida de un convertidor de potencia bidireccional conectado a una red para garantizar que se proporcione […]
 Sistema de control, del 29 de Abril de 2020, de COVENTRY UNIVERSITY: Un sistema de control para controlar una instalación , comprendiendo el sistema de control un bucle de retroalimentación que incluye un integrador […]
Sistema de control, del 29 de Abril de 2020, de COVENTRY UNIVERSITY: Un sistema de control para controlar una instalación , comprendiendo el sistema de control un bucle de retroalimentación que incluye un integrador […]
Procedimiento y aparato de administración de energía eléctrica y dispositivo electrónico, del 1 de Enero de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de administración de energía eléctrica, aplicado en un dispositivo electrónico cargado por un adaptador de alimentación eléctrica […]
MÉTODO DE CONTROL DE UN CONVERTIDOR ELECTRÓNICO CC/CA TRIFÁSICO CON FALLO EN UNA FASE, del 19 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Método de control de un convertidor electrónico CC/CA trifásico con fallo en una fase. Se divulga un método de control de un convertidor electrónico de CC/CA trifásico […]
Método y sistema de refrigeración redundante, del 5 de Diciembre de 2019, de Dawes, Warwick Graham Andrew: Un método para implementar un sistema de refrigeración redundante para proporcionar una carga de refrigeración máxima predeterminada para el aire en un espacio acondicionado […]
Método de control de bomba, del 4 de Diciembre de 2019, de Grundfos Holding A/S: Procedimiento de control de bombas para controlar el funcionamiento de un sistema der bombas con al menos dos equipos de bombas , que están dispuestos en paralelo […]
MÉTODO Y SISTEMA DE CONTROL PREDICTIVO DE UN CONVERTIDOR CC/CA, del 2 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Método y sistema de control predictivo de un convertidor CC/CA. Se divulga un método y un sistema de control predictivo de un convertidor CC/CA para transmisión […]
Equilibrio de par síncrono en sistemas de múltiples bombas, del 5 de Noviembre de 2019, de ITT Manufacturing Enterprises LLC: Un método de control en un sistema que tiene múltiples bombas (18a-18d), en donde las múltiples bombas (18a-18d) se accionan y funcionan conjuntamente […]