Método y sistema para la detección rápida y sensible, a una distancia de seguridad, de contaminantes en una superficie.
Un sistema (10) de detección e identificación de riesgos, a una distancia de seguridad,
capaz de detectar e identificar contaminantes sobre una superficie, que comprende:
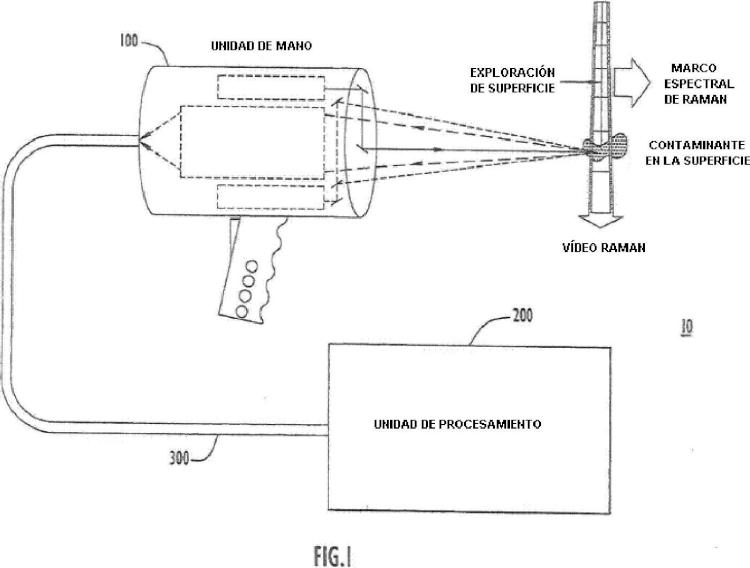
a. una primera unidad (100) que emite un haz de luz monocromática, dirige el haz sobre una superficie que está situada a una distancia desde la primera unidad y captura la radiación dispersada desde el haz desde un punto focal sobre la superficie conforme el haz desplazado a una velocidad de exploración variable sobre la superficie;
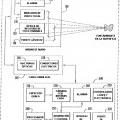
b. una segunda unidad (200) que comprende un espectrógrafo (210) que convierte dicha radiación dispersada en datos espectrales, y un detector pixelado para acumular los dados a un número de marcos de medición por segundo seleccionado según la velocidad a la que el haz es desplazado sobre la superficie y un procesador (240) que analiza los datos espectrales con el propósito de detectar un contaminante sobre la superficie; y
c. un enlace (300) entre la primera unidad y la segunda unidad de unidad para acoplar la radiación dispersada desde la primera unidad a la segunda unidad.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/064475.
Solicitante: Exelis Inc. .
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1650 Tysons Boulevard, Suite 1700 McLean, VA 22102 ESTADOS UNIDOS DE AMERICA.
Inventor/es: PONSARDIN,PATRICK LOUIS, KLETECKA,CHRISTOPHER SCOTT, REZAC,JEROMY PAUL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01J3/44 FISICA. › G01 METROLOGIA; ENSAYOS. › G01J MEDIDA DE LA INTENSIDAD, DE LA VELOCIDAD, DEL ESPECTRO, DE LA POLARIZACION, DE LA FASE O DE CARACTERISTICAS DE IMPULSOS DE LA LUZ INFRARROJA, VISIBLE O ULTRAVIOLETA; COLORIMETRIA; PIROMETRIA DE RADIACIONES. › G01J 3/00 Espectrometría; Espectrofotometría; Monocromadores; Medida del color. › Espectrometría Raman; Espectrometría por difusión.
- G01N21/65 G01 […] › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › Difusión de Raman.
PDF original: ES-2496594_T3.pdf

Fragmento de la descripción:
Método y sistema para la detección rápida y sensible, a una distancia de seguridad, de contaminantes en una superficie
ANTECEDENTES DE LA INVENCIÓN
La presente invención se refiere a espectroscopia aplicada y a la detección e identificación química. Más específicamente, la presente invención se refiere a dispositivos, sistemas y métodos para detectar, a una distancia de seguridad, sustancias peligrosas que pueden estar sobre una superficie.
En el campo de la detección química, es deseable detectar rápidamente las sustancias en una escena contaminada e informar sobre los tipos y las ubicaciones de las sustancias con el propósito de prevenir que terceras personas entren en contacto con o se vean influenciadas por la sustancia detectada. También es un factor clave en la mejora de la gestión de las consecuencias al proporcionar a los tomadores de decisiones la información necesaria para dimensionar y dirigir los esfuerzos de respuesta.
Las técnicas de espectroscopia se usan para analizar sustancias y se han desarrollado técnicas para el ensayo no destructivo de sustancias depositadas sobre una superficie en fases sólida y líquida. Dichas técnicas incluyen la espectroscopia de infrarrojos de transformada de Fourier (FTIR), espectroscopia de rayos X, cromatografía de gases y espectrometría de masas (GC-MS) y espectroscopia Raman de infrarrojos (Raman de IR). Los detectores de peligros en superficies, disponibles en la actualidad, son dispositivos de tipo "apuntar y disparar", en los que el operarlo del dispositivo sostiene una sonda de detección sobre una ubicación específica a muy corta distancia y permanece en esa ubicación específica durante una cantidad de tiempo para proporcionar un tiempo de integración suficiente en el detector o, en el caso de GC-MS, para captar suficientes compuestos de superficie en fase de vapor para llevar a cabo el análisis. De esta manera, estos dispositivos requieren que el operario se acerque a una distancia muy cercana a una sustancia potencialmente dañina y mantenga la proximidad a esa sustancia durante un tiempo suficientemente largo para obtener una única medición. Por lo tanto, la tarea de realizar una exploración de una amplia zona o reglón para buscar sustancias potencialmente dañinas es desalentadora y requiere estrategias de muestreo juiciosas para maxlmlzar la eficiencia del procedimiento. El aspecto más difícil asociado con la búsqueda de contaminantes dispersados sobre una superficie reside en la variedad de especies químicas a las que es expuesto un detector durante una búsqueda.
La contaminación superficial puede ser el resultado de un accidente o de una dispersión intencionada del contaminante y, por lo tanto, la contaminación superficial puede consistir en un único producto químico o múltiples productos químicos a granel o dispersados en una amplia zona. En el caso de parches persistentes de contaminación compuestos de capas delgadas, pequeñas gotitas o pequeñas partículas, ninguno de los métodos indicados anteriormente proporciona capacidades de detección adecuadas.
Por ejemplo, un sistema FTIR disponible comercialmente para una respuesta de emergencia requiere 2 segundos para llevar a cabo un único análisis de identificación de muestra, tiempo durante el cual la muestra debe ser retirada físicamente de la superficie y presentada al detector. Otro ejemplo es un sistema Raman de IR, disponible comercialmente, para una respuesta de emergencia que requiere una distancia máxima de 15 mm y tiempos de medición típicamente de entre 1 y 5 segundos con un máximo de 2 segundos para algunas muestras.
La espectroscopia Raman de UV tiene muchas propiedades únicas que pueden ser empleadas ventajosamente en la detección e identificación rápida, a una distancia de seguridad, de peligros depositados sobre una superficie. El alto grado de contenido de información inherente en la espectroscopia Raman proporciona la capacidad de diferenciar productos químicos estructuralmente similares, con bajas tasas de falsas alarmas. El contenido de información está asociado con los grados de libertad vibratorios asociados con cualquier molécula. Esta riqueza de modos de vibración se manifiesta en picos de Raman ricos y estrechos que proporcionan una huella espectral de un material Raman activo determinado. Sin embargo, la dispersión Raman espontánea tiene una sección transversal intrínsecamente débil. La intensidad y la calidad de un espectro Raman depende de (1) la longitud de onda, el ancho de línea y la pureza espectral de la luz de excitación, (2) el grado en el que la excitación o la luz dispersada son absorbidas, la cantidad de fluorescencia interferente que se emite, y la potencial existencia de una emisión interferente debida a una descomposición inducida por láser de los materiales de la superficie, (3) la estabilidad térmica y fotoquímica de la muestra bajo excitación, y (4) el número o los productos químicos interrogados simultáneamente (congestión espectral). Por lo tanto, para maximizar la facilidad de uso en las aplicaciones prácticas, los detectores Raman de UV se concentran en una longitud de onda corta que resulta en secciones transversales de dispersión más grandes, un menor fondo de fluorescencia natural (sin necesidad de foto-blanqueo), una región espectral ciega a la luz solar inferior a 3 nm (importante para un detector a distancia de seguridad) y mejora de la resonancia de la sección transversal de dispersión Raman para algunas transiciones
vibratorias. Además, las fuentes de luz UV con una longitud de onda menor de 3 nm prácticamente no presentan riesgos de daños oculares al personal que utiliza protecciones oculares de plástico estándar o de vidrio no cristalino.
Se necesita un sistema de detección de peligros sobre una superficie que pueda interrogar, de manera segura, superficies desde mayores distancias y que puede hacerlo con un alto grado de flexibilidad ajustando el campo de detección de interés. Este sistema de detección de peligros, a una distancia de seguridad, sobre una superficie necesita también analizar rápidamente la radiación óptica devuelta desde la sustancia con el propósito de proporcionar un alto procesamiento de datos que permita búsquedas en perímetros grandes. La espectroscopia Raman de UV proporciona la base para este detector de alto rendimiento.
El artículo "Láser interrogation of surface agents (LISA) for Chemical agent reconnaissance" (Chemical and Biological Sensing III, 2 de Abril de 22; Proceedings of the SPIE, Vol 4722, páginas 5-59) describe un sistema para la interrogación láser de agentes sobre una superficie (LISA) que aprovecha la dispersión Raman para proporcionar una detección e identificación, a una distancia de seguridad, de agentes químicos depositados sobre una superficie. El artículo describe un transmisor láser y un telescopio que captura la luz en una unidad en el extremo de entrada del haz de fibras ópticas y un espectrógrafo que comprende una óptica dispersiva y un fotodetector en la forma de una CCD en el extremo de salida del haz de fibras (Figura 1). La configuración óptica mostrada en la Figura 2 describe el uso de un láser UV y traslación accionada por motor del espejo primarlo para ajustar automáticamente el foco de los medios de captura de la luz dispersada que constituye un buscador de rango láser. La Figura 3 ilustra los espectros Raman obtenidos con la radiación láser UV incidente y la página 53 describe la técnica de uso de una biblioteca de espectros Raman con algoritmos adaptativos para identificar los productos químicos peligrosos mediante una comparación de los espectros Raman detectados con los espectros en la biblioteca.
RESUMEN DE LA INVENCIÓN
La presente invención está dirigida a un sistema y un método para una detección rápida y sensible, a una distancia de seguridad, de un peligro sobre una superficie con un alto procesamiento de datos, de alta resolución espacial y de alto grado de flexibilidad para apuntar, según las reivindicaciones 1-17 adjuntas.
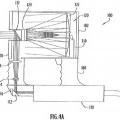
Según una realización de la invención, el sistema comprende una primera unidad de mano que dirige un haz de excitación sobre una superficie que está situada a una distancia de la primera unidad y un subsistema óptico que captura la radiación dispersada desde la superficie como resultado del haz de luz. La primera unidad está conectada, a través de un enlace que incluye un haz de fibras ópticas, a una segunda unidad, denominada unidad de procesamiento. La unidad de procesamiento comprende un espectrógrafo acoplado a las fibras para convertir la radiación dispersada en datos espectrales, y un procesador que analiza la señal recogida y detecta la sustancia peligrosa. La segunda unidad puede estar contenida dentro de... [Seguir leyendo]
Reivindicaciones:
1. Un sistema (1) de detección e identificación de riesgos, a una distancia de seguridad, capaz de detectar e identificar contaminantes sobre una superficie, que comprende:
a. una primera unidad (1) que emite un haz de luz monocromática, dirige el haz sobre una superficie que está situada a una distancia desde la primera unidad y captura la radiación dispersada desde el haz desde un punto focal sobre la superficie conforme el haz desplazado a una velocidad de exploración variable sobre la superficie;
b. una segunda unidad (2) que comprende un espectrógrafo (21) que convierte dicha radiación dispersada en datos espectrales, y un detector pixelado para acumular los dados a un número de marcos de medición por segundo seleccionado según la velocidad a la que el haz es desplazado sobre la superficie y un procesador (24) que analiza los datos espectrales con el propósito de detectar un contaminante sobre la superficie; y
c. un enlace (3) entre la primera unidad y la segunda unidad de unidad para acoplar la radiación dispersada desde la primera unidad a la segunda unidad
2. El sistema de la reivindicación 1, en el que la primera unidad (1) es un dispositivo de mano portable que comprende una fuente (11) de luz monocromática que produce el haz de luz monocromática.
3. El sistema de la reivindicación 2, en el que la fuente de luz monocromática es un láser (11) ultravioleta (UV) alimentado por batería.
4. El sistema de la reivindicación 1, en el que la segunda unidad (2) comprende una fuente de luz monocromática que genera el haz de luz monocromática, y en el que dicho enlace (3) comprende una fibra óptica que suministra el haz a la primera unidad (1) desde la cual el haz es emitido y es dirigido hacia la superficie.
5. El sistema de la reivindicación 1, en el que dicha primera unidad (1) comprende un subsistema (12) óptico de recogida que recoge la radiación dispersada desde el punto focal sobre la superficie para acoplarla a través de dicho enlace (3) a dicha segunda unidad.
6. El sistema de la reivindicación 5, en el que dicha primera unidad (1) comprende un indicador (13) de objetivo visible que indica el punto focal del subsistema de óptica de recogida y la ubicación del haz sobre la superficie.
7. El sistema de la reivindicación 6, en el que el indicador de objetivo visible comprende al menos dos diodos (117) láser montados en una carcasa de dicha primera unidad (1) y posicionados de manera que sus haces se crucen sobre la superficie en el punto focal de la óptica de recogida.
8. El sistema de la reivindicación 1, en el que dicha fuente (11) de luz monocromática genera dicho haz de luz monocromática en el espectro ultravioleta (UV) para inducir a las sustancias sobre dicha superficie a emitir radiación Raman dispersada desde dicha superficie.
9. El sistema de la reivindicación 8, en el que dicho procesador (24) compara los datos espectrales con los datos espectrales de sustancias conocidas para determinar si la sustancia sobre la superficie es o no un contaminante conocido.
1. El sistema de la reivindicación 1, en el que el haz emitido desde la primera unidad (1) es desplazado a través de la superficie a una velocidad de exploración de hasta decenas de centímetros por segundo.
11. El sistema de la reivindicación 1, en el que dicha fuente (11) de luz monocromática genera el haz de luz monocromática con el propósito de iluminar un punto en el punto focal sobre la superficie que es de menos de un milímetro de diámetro.
12. El sistema de la reivindicación 1, en el que dicha segunda unidad (2) comprende además un detector pixelado para generar datos de detector indicativos de los componentes espectrales de la radiación dispersada, en el que el procesador está configurado para formar un marco de medición que comprende los datos de detección de un retorno o una acumulación de una pluralidad de retornos de la radiación dispersada desde la superficie.
13. El sistema de la reivindicación 12, en el que dicha segunda unidad (2) genera marcos de medición a una velocidad de más de 1 marcos de medición por segundo.
14. El sistema de la reivindicación 12, en el que el procesador (24) ajusta la velocidad de datos ajustando un número de retornos de radiación dispersada acumulados durante el marco de medición.
15. El sistema de la reivindicación 1, en el que el procesador(24) controla la segunda unidad para operaren uno de entre un primer modo y un segundo modo de funcionamiento, en el que en el primer modo, el procesador acumula un primer número de retornos de radiación dispersada durante el marco de medición para una exploración rápida de la superficie y un análisis de menor fidelidad y, en el segundo modo, el procesador acumula un segundo número de retornos de radiación dispersada mayor que el primer número de retornos, para el marco de medición para una exploración menos rápida de la superficie y un análisis de mayor fidelidad.
16. El sistema de la reivindicación 5, en el que el subsistema de óptica de recogida comprende uno o más elementos ópticos que son móviles para ajustar su punto focal.
17. Un método de detección e identificación de contaminantes sobre una superficie usando un sistema (1) de detección e identificación de sustancias peligrosas, a una distancia de seguridad, en el que dicho método comprende las etapas de:
a. con una primera unidad (1), emitir un haz de luz monocromática, dirigir el haz a una superficie situada a una distancia desde la primera unidad y capturar la radiación dispersada desde el haz desde un punto focal sobre la superficie conforme el haz es desplazado a una velocidad de exploración variable sobre la superficie;
b. con una segunda unidad (2), que comprende un espectrógrafo (21), convertirla radiación dispersada a datos espectrales, un detector pixelado para acumular los datos a un número de marcos de medición por segundo seleccionado según la velocidad a la que el haz es desplazado sobre la superficie, y un procesador (24) que analiza los datos espectrales con el propósito de detectar un contaminante sobre la superficie; y
c. acoplar la radiación dispersada desde la primera unidad a la segunda unidad usando un enlace (3) entre la primera unidad y la segunda unidad.
Patentes similares o relacionadas:
Método para el diagnóstico de tensiones y enfermedades en plantas superiores, del 10 de Julio de 2019, de EMPRESA BRASILEIRA DE PESQUISA AGROPECUARIA - EMBRAPA: Un método para diagnóstico de la enfermedad de Greening en plantas de cítricos superiores de un huerto con un aparato que comprende una fuente de excitación , un cable […]
Detector de partículas transportadas por fluidos, del 12 de Junio de 2019, de THE SECRETARY OF STATE FOR DEFENCE: Un equipo para la detección de una partícula transportada por fluido que comprende i. un par de superficies reflectantes cóncavas coaxialmente opuestas […]
Método y aparato para medición transdérmica in vivo mediante espectroscopía Raman, del 22 de Febrero de 2019, de RSP Systems A/S: Un método para predecir si un espectro de señales Raman que se recibe transdérmicamente en un aparato detector confocal y tiene al menos un componente que […]
Aparato y procedimiento para la concentración de partículas de ensayo, del 30 de Agosto de 2017, de BECTON, DICKINSON AND COMPANY: Un aparato de ensayo que comprende: un tubo capilar ; un depósito de muestra ; un cartucho de muestra en el que el depósito […]
Una nanoetiqueta de SERS de longitud de onda selectiva, del 21 de Diciembre de 2016, de SICPA HOLDING SA: Una nanoetiqueta SERS selectiva en longitud de onda de onda que comprende: un núcleo de mejora de SERS; una molécula informadora activa […]
PROCEDIMIENTO PARA EL DIAGNÓSTICO DE PROCESOS DE DESMINERALIZACIÓN DENTAL, del 3 de Noviembre de 2016, de UNIVERSIDADE DE VIGO: La presente invención se refiere a un procedimiento cuantitativo "ex vivo" para el diagnóstico complementario del grado de desmineralización dental mediante el uso de la espectroscopia […]
Procedimiento para el diagnóstico de procesos de desmineralización dental, del 27 de Octubre de 2016, de UNIVERSIDADE DE VIGO: La presente invención se refiere a un procedimiento cuantitativo "ex vivo" para el diagnóstico complementario del grado de desmineralización dental mediante el uso de la […]
Técnicas espectroscópicas mejoradas que usan conformación de haz espacial, del 28 de Septiembre de 2016, de THE UNIVERSITY COURT OF THE UNIVERSITY OF ST ANDREWS: Un método de espectroscopia Raman para recoger una señal de Raman con ruido o fluorescencia de fondo reducidos, comprendiendo el método: excitar una señal de Raman iluminando […]