Método de localización de un agujero perforado con una perforadora de rocas.
Método de localización de un agujero (11) perforado con una perforadora de roca comprendiendo el posicionamiento de un brazo (3) dispuesto sobre un aparato de perforación de roca cerca del agujero perforado con la ayuda de un sistema de posicionamiento dispuesto sobre el aparato de perforación de roca,
caracterizado por el hecho de que una imagen digital es creada por medio de una cámara fotográfica (5) dispuesta sobre el brazo (3), de que una distancia entre el brazo (3) y el agujero perforado (11) es medida por un medidor de distancia (6), de que la imagen digital es almacenada en un ordenador (2), de que la imagen almacenada es transformada en una imagen que contiene sólo partes blancas y negras, de que la imagen con partes sólo blancas y negras es escaneada para encontrar una parte negra con un tamaño comprendido en un intervalo de tamaño correspondiente al agujero perforado y de que la posición de la boca del agujero de perforación en la cámara es determinada con la ayuda de la posición de la parte negra y de la distancia medida.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2003/000426.
Solicitante: ATLAS COPCO ROCK DRILLS AB.
Nacionalidad solicitante: Suecia.
Dirección: 701 91 ÖREBRO SUECIA.
Inventor/es: PLANESKOG,BERTIL, GUSTAVSSON,HANS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E21B44/00 CONSTRUCCIONES FIJAS. › E21 PERFORACION DEL SUELO O DE LA ROCA; EXPLOTACION MINERA. › E21B PERFORACION DEL SUELO O DE LA ROCA (explotación minera o de canteras E21C; excavación de pozos, galerías o túneles E21D ); EXTRACCION DE PETROLEO, GAS, AGUA O MATERIALES SOLUBLES O FUNDIBLES O DE UNA SUSPENSION DE MATERIAS MINERALES A PARTIR DE POZOS. › Sistemas de control automático especialmente adaptados a operaciones de perforación, es decir, sistemas de funcionamiento automático los cuales pueden ejecutar o modificar una operación de perforación sin la intervención de un operador humano, p. ej. sistemas de perforación controlados por computador (para control de perforación no automático, ver la operación controlada; alimentación automática a partir de bastidores y conexión de tubos de perforación E21B 19/20; control de la presión o de la corriente de un fluido de perforación E21B 21/08 ); Sistemas especialmente adaptados para la vigilancia de varias variables o condiciones de perforación (medios para transmitir señales de medida desde el pozo a la superficie E21B 47/12).
- E21D20/00 E21 […] › E21D POZOS; TUNELES; GALERIAS; GRANDES CAMARAS SUBTERRANEAS (materiales para acondicionar o estabilizar el suelo C09K 17/00; máquinas cortantes para la explotación de minas o canteras E21C; dispositivos de seguridad, de transporte, de salvamento, de ventilación o de drenaje E21F). › Colocación in situ de pernos de anclaje (pernos de anclaje para pozos, túneles o galerías E21D 21/00; medios de anclaje de elementos de estructura o de cortinas de tablestacas especialmente concebidos para trabajos de cimentación E02D 5/74; espigas u otros dispositivos fijados a las paredes o a cualquier otro emplazamiento por inserción en agujeros preparados para ello F16B 13/00).
- G06T7/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
- G06T7/60 G06T […] › G06T 7/00 Análisis de imagen. › Análisis de los atributos geométricos.
Descripción:
Método de localización de un agujero perforado con una perforadora de rocas [0001] La presente invención se refiere a un método de localización de un agujero perforado con una perforadora de rocas, por ejemplo en conexión con un bulonaje de rocas y un aparato de perforación de rocas.
Según un método conocido anteriormente de bulonaje de rocas con aparato de perforación se aplica firmemente una deslizadera sobre un aparato de perforación de rocas contra la roca, después de lo cual se perfora un agujero con una perforadora de rocas. A continuación se retira la perforadora de rocas y se instala un dispositivo de bulonaje para la introducción de un bulón de roca en el interior del agujero perforado. Se pueden desarrollar otras fases también en función del tipo de bulón de roca. Con el fin de poder introducir prácticamente el bulón de roca en el interior del agujero, la aplicación firme contra la roca debe ser mantenida durante la secuencia de perforación y el ajuste del bulón. La razón de ello es que se mueven masas de gran tamaño durante el posicionamiento de la deslizadera. Como el aparato de perforación de rocas posee varias conexiones entre el soporte y el punto de aplicación contra la roca, no se obtiene una precisión suficiente de alineación contra el agujero perforado cuando se utiliza el sistema de alineación propio al aparato de perforación de rocas. Tampoco es posible separar en la práctica la perforación y el bulonaje entre las diferentes unidades de brazos sobre el aparato de perforación de rocas.
Se conoce un método como en el preámbulo de la reivindicación 1 por la patente EP 0 417 055 A.
Peter Corke et al : Vision-Based Control for Minning Automation, IEEE Robotics & Automation Magazine Dic. 1998, divulga un servosistema visual previsto para el uso en minas.
La presente invención, que está definida en la siguiente reivindicación, tiene como objetivo la realización de un método y un aparato de perforación de rocas que permita tener un grado de automatización elevado del bulonaje de rocas y también la perforación y el bulonaje con brazos separados para las unidades empleadas para la perforación y el bulonaje.
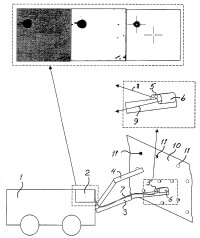
Se describe una forma de realización de la invención más abajo en referencia al dibujo anexo donde la Fig. 1 muestra un aparato de perforación de rocas. La Fig. 2 muestra en una escala mayor una parte del aparato de perforación de rocas según la Fig. 1. Las figuras 3-5 muestran imágenes de una superficie de roca con distintos grados de tratamiento de la imagen.
El aparato de perforación de rocas mostrado en el dibujo comprende un soporte 1 sobre el cual están dispuestos dos brazos 3 y 4, como se muestra en el ejemplo. El aparato de perforación de rocas está provisto de un ordenador 2. Sobre el brazo 3 están dispuestos una cámara digital 5 y un medidor de distancia 6. Estos están conectados con el ordenador 2 por medio de conducciones 7 o de conexiones inalámbricas 8 y 9. El medidor de distancia funciona de forma apropiada con ultrasonidos. La perforación es efectuada en una superficie de roca 10 la cual, en la Fig. 1, es mostrada por unos agujeros negros 11. En el ejemplo mostrado, la perforación es realizada por una perforadora de rocas dispuesta sobre un brazo 4. El agujero perforado es posteriormente localizado por la cámara digital 5, el medidor de distancia 6 y el ordenador 2. También se puede tener la perforadora de rocas, la cámara digital y el medidor de distancia sobre el mismo brazo. De este modo no es necesario mantener el brazo firmemente contra la superficie de roca 10 entre la perforación y la localización subsiguiente del agujero perforado.
El método según la invención funciona de la manera siguiente. Primero se perforan uno o más agujeros 11 en la superficie de la roca 10 por medio de una perforadora de rocas montada sobre uno de los brazos 3 o 4. Para localizar un agujero perforado, un brazo 3 es alineado con la ayuda del sistema de posicionamiento del aparato de perforación de tal modo que la cámara digital 5 y el medidor de distancia 6 estén cerca del agujero que localizar. Una imagen de la superficie de roca 10 es almacenada en el ordenador, véase Fig. 3. Además, la distancia medida es almacenada en el ordenador. La imagen almacenada, véase Fig. 3, comprende un agujero en negro y el resto ilustrado con distintos matices de gris. Con la ayuda de un programa almacenado en el ordenador, se crea una nueva imagen, véase Fig. 4, que comprende sólo manchas blancas y negras. Esta imagen es filtrada para que queden sólo las partes negras en un intervalo de tamaño predeterminado, véase Fig. 5. La matriz de la imagen es escaneada para determinar las coordenadas externas de la parte negra. Este área es comparada con el tamaño de un agujero perforado mediante el cálculo del tamaño real de la matriz de imagen con la ayuda de las coordenadas externas y de la distancia medida. Cuando se encuentra un área correspondiente al tamaño y a la forma de un agujero perforado, de un tamaño conocido, se determinan las coordenadas del centro del área. Después de esto, se puede alinear un brazo contra el agujero con la ayuda de las coordenadas, por ejemplo para la inserción de un bulón de roca.
Reivindicaciones:
1. Método de localización de un agujero (11) perforado con una perforadora de rocas comprendiendo el
posicionamiento de un brazo (3) dispuesto sobre un aparato de perforación de rocas cerca del agujero perforado
5 con la ayuda de un sistema de posicionamiento dispuesto sobre el aparato de perforación de rocas,
caracterizado por el hecho de que una imagen digital es creada por medio de una cámara fotográfica (5)
dispuesta sobre el brazo (3) , de que una distancia entre el brazo (3) y el agujero perforado (11) es medida por un
medidor de distancia (6) , de que la imagen digital es almacenada en un ordenador (2) , de que la imagen
almacenada es transformada en una imagen que contiene sólo partes blancas y negras, de que la imagen con
10 partes sólo blancas y negras es escaneada para encontrar una parte negra con un tamaño comprendido en un
intervalo de tamaño correspondiente al agujero perforado y de que la posición de la boca del agujero de
perforación en la cámara es determinada con la ayuda de la posición de la parte negra y de la distancia medida.
2. Aparato de perforación de rocas comprendiendo:
15 un soporte (1) con uno o dos brazos (3, 4) ;
un ordenador (2) ;
una cámara digital (5) y un medidor de distancia (6) dispuesto para medir uno de dichos uno o dos brazos (3, 4) ,
dicha cámara digital y medidor de distancia estando conectados al ordenador (2) ;
una perforadora de rocas dispuesta en uno de dichos uno o dos brazos (3, 4) , y
20 un sistema de posicionamiento para el posicionamiento de dichos uno o dos brazos;
dicho aparato de perforación de rocas dispuesto para:
localizar un agujero (11) perforado con dicha perforadora de rocas posicionando uno de dichos brazos (3) cerca
del agujero perforado con la ayuda de dicho sistema de posicionamiento;
crear una imagen digital por medio de dicha cámara (5) ;
25 medir una distancia entre dicho brazo (3) y dicho agujero perforado (11) por medio de dicho medidor de distancia
(6) ;
almacenar dicha imagen digital en dicho ordenador (2) ;
transformar dicha imagen almacenada en una imagen conteniendo sólo partes negras y blancas;
escanear dicha imagen con partes sólo blancas y negras para encontrar una parte negra con un tamaño
30 comprendido en un intervalo de tamaño correspondiente al agujero perforado, y
determinar la posición de la boca del agujero de perforación en la cámara con la ayuda de la posición de la parte
negra y de la distancia medida.
Patentes similares o relacionadas:
Método, sistema y producto del programa informático para determinar la presencia de microorganismos e identificar dichos microorganismos, del 29 de Julio de 2020, de BIOMERIEUX: Un método para determinar la presencia de al menos un microorganismo determinado en una placa de Petri que comprende una o más colonias de microorganismos y un medio de […]
Detección de daño de pantalla para dispositivos, del 8 de Julio de 2020, de Hyla, Inc: Un procedimiento para identificar una condición de una o más pantallas de un dispositivo electrónico, comprendiendo el procedimiento: recibir una solicitud […]
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 29 de Junio de 2020, de UNIVERSIDAD DE GRANADA: Procedimiento de identificación de imágenes óseas. La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense […]
Procedimientos, sistemas y dispositivos para analizar datos de imágenes pulmonares, del 27 de Mayo de 2020, de Pulmonx Corporation: Procedimiento para analizar datos de tomografía computarizada de un pulmón, comprendiendo el procedimiento: recibir mediante un dispositivo […]
Distribución controlada de muestras sobre sustratos, del 27 de Mayo de 2020, de Roche Diagnostics Hematology, Inc: Un procedimiento para distribuir una muestra de líquido sobre un sustrato , comprendiendo el procedimiento: obtener una […]
Sistema y procedimiento de control de calidad de platos preparados, del 14 de Mayo de 2020, de BEABLOO, S.L: Sistema y procedimiento de control de calidad de platos preparados. El sistema comprende medios de detección para detectar los ingredientes […]
Registro de imagen de catéter del seno coronario, del 13 de Mayo de 2020, de Biosense Webster (Israel), Ltd: Un aparato que comprende: un catéter cardíaco adaptado para su introducción en un seno coronario de un corazón de un sujeto vivo; una pantalla ; un dispositivo […]
Sistema y aplicación para visualizar la realidad exterior mientras se utilizan teléfonos y dispositivos móviles, del 11 de Mayo de 2020, de YAGÜE HERNANZ, Ricardo: 1. Sistema y aplicación para ver en los teléfonos y terminales móviles la realidad exterior a la vez que se usan y se visualizan sus […]