MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD.
Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad,
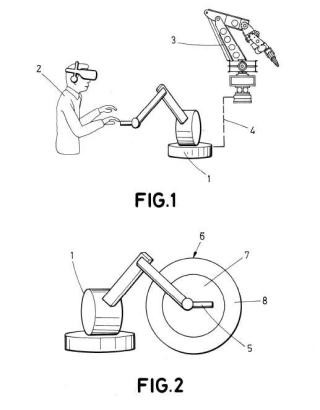
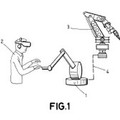
que comprende la adaptación del dispositivo maestro (1) dividiendo su zona de trabajo (6) en región interna (7) donde se implementa el modo de control en posición del robot esclavo (3), y región externa (8) donde se implementa el modo de control en velocidad; utilización de una red de comunicaciones (4) para transmitir órdenes de movimiento y fuerzas ejercidas por ambos dispositivos; adaptación del dispositivo maestro (1) para que produzca efectos de vibración en las transiciones entre región interna (7) y externa (8), indicando el cambio de un modo de control a otro el cambio de un modo de control a otro se produce de forma que se garantiza el funcionamiento estable de los dispositivos y la máxima telepropriocepción para el operador.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201132146.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: FERRE PEREZ,MANUEL, ARACIL SANTONJA, RAFAEL, BARRIO GRAGERA,Jorge, SUÁREZ RUIZ,Francisco Alejandro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J3/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 3/00 Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio. › dotados de servomecanismos (cabezas servocontroladas en sí B25J 15/02).
Fragmento de la descripción:
Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad.
OBJETO DE LA INVENCIÓN
La invención, tal como expresa el enunciado de la presente memoria descriptiva, se refiere a un método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, aportando a la función a que se destina varias ventajas y características de novedad, que se describirán en detalle más adelante y que suponen una notable mejora frente a los sistemas actualmente conocidos en el estado de la técnica para el mismo fin.
Más en particular, la invención se centra en el desarrollo de un innovador método de guiado con reflexión de fuerzas , siendo aplicable a operaciones de manipulación remota en las que participan, al menos, un robot que realiza la operación en un entorno remoto, denominado esclavo, y un dispositivo de guiado del robot que manipula un operario, denominado maestro, y cuyos movimientos se utilizan para guiar los movimientos del esclavo, permitiendo utilizar alternativamente, modos de control en posición y modos de control en velocidad de dicho esclavo con respecto al maestro. El cambio de un modo de control a otro se ha definido con el objeto de evitar las inestabilidades en la transición entre ambos modos de control, basándose para ello en la adaptación del dispositivo maestro para que opere en dos regiones diferenciadas, una para cada modo, y proporcionando información háptica al operador al pasar de una región a otra.
El dispositivo maestro, además, refleja fuerzas al operador, lo que le permite realizar las tareas de manipulación con destreza y los cambios en el modo de control de forma eficiente.
CAMPO DE APLICACIÓN DE LA INVENCIÓN
El campo de aplicación de la presente invención se enmarca dentro del sector técnico de la robótica y el control remoto de dispositivos, abarcando actividades como la teleoperación o la telerrobótica, aplicaciones en las que una persona utiliza un dispositivo, conocido como maestro, que le permite guiar el movimiento de otro dispositivo remoto, conocido como esclavo.
ANTECEDENTES DE LA INVENCIÓN
En la actualidad, casi la totalidad de los robots o sistemas semejantes guiados remotamente, utilizan un único modo de control, que suele ser o control en posición o control en velocidad. Cuando el operador utiliza un dispositivo maestro con dimensiones semejantes a las del esclavo, suele utilizarse el control en posición. Por el contrario, cuando el operador utiliza un dispositivo dimensional o dinámicamente muy diferente al controlado remotamente, se suele utilizar el control en velocidad.
Un ejemplo habitual de control en velocidad es el guiado de una grúa. La grúa representa al dispositivo esclavo, que es controlado por el operador mediante unas palancas, que actúan como dispositivo maestro. La activación de estas palancas son las que determinan la velocidad y sentido de giro de los diferentes grados de libertad de la grúa. Cuando las palancas se activan, entonces la grúa se mueve; es decir, si las palancas no se encuentran en su punto de reposo, se generan órdenes de movimiento para la grúa. Este tipo de guiado se denomina control en velocidad.
Otros dispositivos tales como los ‘joysticks’ también son utilizados como dispositivo maestro. Los ‘joysticks’ son habitualmente usados como periféricos de ordenador para que el usuario interaccione con diferentes tipos de aplicaciones y juegos de ordenador. Habitualmente, el ‘joystick’ sirve para indicar la dirección de movimiento y/o velocidad que desea el usuario para el elemento que controla en la aplicación.
Por su parte, el guiado en posición es característico de las aplicaciones de robótica en las que se desea que el robot controlado a distancia (esclavo) , reproduzca fielmente los movimientos que realiza el operador mediante el uso de un dispositivo (maestro) . Este tipo de guiado requiere que maestro y esclavo tengan cierta relación cinemática, o al menos un campo de trabajo similar. Este es el caso de la mayor parte de los telerrobots utilizados en la industria; como son el Grips de Kraft Telerobotics, Mascot IV de Oxford Technologies LTD., o los telemanipuladores Titan de Schilling Robotics.
Sin embargo, ninguno de los sistemas telerrobóticos comercializados en la actualidad permite la combinación del control en posición y el control en velocidad. Cuando existen diferencias significativas entre el campo de trabajo de maestro y esclavo se utiliza el control en velocidad o el control en posición con indexación. La indexación consiste en desacoplar maestro y esclavo cuando el maestro alcanza su límite de movimiento, entonces se reubica al maestro en una nueva posición que permita guiar de nuevo al esclavo de forma favorable. El inconveniente de la indexación es que se pierden las referencias de movimiento entre maestro y esclavo. Lo cual supone una disminución del rendimiento del sistema ya que el operador precisa reubicarse en el nuevo sistema de referencia.
Como es sabido, se conoce como telepropriocepción a la correcta percepción que tiene una persona que guía un robot cuando siente que los movimientos que él realiza se reproducen correctamente por el robot al que está guiando remotamente. La telepropriocepción es un problema relacionado con la coherencia entre los sistemas de referencia de los movimientos que se realizan. Los sistemas de referencia que intervienen están los ligados a: dispositivo maestro, dispositivo esclavo, y dispositivos de realimentación de información.
Los sistemas de referencia de maestro y esclavo dependen de la base a la que están fijados cada uno de ellos. El dispositivo de realimentación de información más habitual está formado por una o varias cámaras de vídeo, y su sistema de referencia dependerá de donde se encuentren fijadas las cámaras que podrán tener una posición fija, o por el contrario estar solidarias al robot esclavo.
La gran ventaja del control en posición es que garantiza altos niveles de telepropriocepción y por tanto una elevada productividad de los sistemas teleoperados. El problema de la indexación es que se pierde la coherencia entre los sistema de referencia de maestro y esclavo, y con ello la telepropriocepción, y como consecuencia disminuye significativamente la productividad.
El objetivo del método de guiado que propone la presente invención es, pues, evitar dichos inconvenientes y mantener la telepropriocepción del operador, aún variando el modo de control, de forma que no afecte a la productividad del sistema de teleoperación, debiendo señalarse que, al menos por parte del solicitante, se desconoce la existencia de ningún otro método de guiado o invención de aplicación similar que presente unas características técnicas semejantes a las que presenta el que aquí se preconiza, según los principios de las reivindicaciones.
EXPLICACIÓN DE LA INVENCIÓN
De forma concreta, lo que la invención propone, como ya se ha apuntado anteriormente , es un método de guiado de robots de forma remota con la finalidad de combinar eficientemente control en posición y control en velocidad. El control en posición se utilizará cuando se requiera guiar un robot de forma muy precisa y el control en velocidad será usado cuando se requiera realizar grandes desplazamientos.
En las operaciones de guiado de robots se considera la participación de dos dispositivos básicos, uno el robot que realiza la operación en un entorno remoto, conocido como esclavo; y otro, el dispositivo utilizado para guiar al esclavo, que se denomina maestro. Un operador humano será el encargado de utilizar el dispositivo maestro con la finalidad de guiar los movimientos del esclavo.
Para realizar dicho guiado el método que preconiza la presente invención se basa en definir dos regiones diferenciadas de trabajo para el dispositivo maestro. Así, se contempla una región interior en la que se implementa un modo de control en posición, y una región externa en la que se implementa un modo de control de movimiento en velocidad. Y, para evitar eventuales inestabilidades en los sistemas de control en las transiciones entre ambos modos de control, se el dispositivo maestro adapta para que trabaje de acuerdo a las siguientes reglas de funcionamiento:
El modo de control, en la región o zona interna del maestro, arrancará siempre desde la posición de reposo del robot esclavo. Este modo de control será en posición. Es decir, los movimientos del maestro se corresponderán con movimientos similares del esclavo, pudiéndose reflejar fuerzas al maestro que, habitualmente, se corresponderán con las fuerzas...
Reivindicaciones:
1. MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD, aplicable a operaciones de guiado de robots donde un operador (2) humano utiliza un dispositivo maestro (1) , mediante el manejo un efector final (5) que abarca un determinado espacio de trabajo (6) , para guiar, a través de una red de comunicaciones (4) , un robot esclavo (3) que realiza la operación en un entorno remoto, caracterizado porque comprende la adaptación de dicho dispositivo maestro (1) para dividir su zona de trabajo (6) en una región interna (7) donde se implementa el modo de control en posición del robot esclavo (3) , y una región externa (8) donde se implementa el modo de control en velocidad, contemplando la utilización de una red de comunicaciones (4) entre los controladores de los dispositivos maestro (1) y robot esclavo (3) para que transmitan tanto órdenes de movimiento como fuerzas ejercidas por ambos dispositivos.
2. MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD, según la reivindicación 1, caracterizado porque la región interna (7) del dispositivo maestro (1) ocupa una zona aproximadamente esférica con centro en el centro de la zona de trabajo (6) y radio menor a radio máximo de actuación del efector final (5) , y la región externa (8) abarca el resto del espacio que ocupa la zona de trabajo (6) .
3. MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD, según la reivindicación 1 ó 2, caracterizado porque contempla la adaptación del dispositivo maestro (1) para que produzca efectos de vibración perceptibles por el operador (2) en cada una de las transiciones entre la región interna (7) y la región externa (8) del efector final (5) , indicando el cambio de modo de control.
4. MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD, según cualquiera de las reivindicaciones 1-3, caracterizado porque en el modo de control en posición, donde los movimiento del maestro (1) se corresponden con movimientos similares del esclavo, se reflejan fuerzas al maestro que se corresponden con las fuerzas ejercidas por el robot esclavo (3) sobre el entorno.
5. MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD, según cualquiera de las reivindicaciones 1-4, caracterizado porque, cuando se produce la transición de la región externa (8) a la interna (7) , el efector final del dispositivo maestro (1) vuelve al punto central de la región interna, garantizando el sincronismo entre las posiciones de maestro y esclavo.
6. MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD, según cualquiera de las reivindicaciones 1-5, caracterizado porque, cuando el maestro está en la región externa (8) , y por tanto en modo de control en velocidad, la velocidad de desplazamiento del esclavo (3) es proporcional a la penetración del efector (5) en dicha región externa (8) , siendo dicha penetración la distancia mínima que separa al efector (5) de la región interna (7) ;porque en dicha región externa (8) , la dirección de desplazamiento del esclavo (3) , es la indicada por la orientación de su efector final; y porque al dispositivo maestro (1) se le refleja una fuerza proporcional a la penetración en la zona externa (8) .
Patentes similares o relacionadas:
 MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS, del 4 de Julio de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende […]
MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS, del 4 de Julio de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende […]
SISTEMA DE CONTROL ANTI-COLISION PARA UN MANIPULADOR CONTROLABLE DE FORMA MULTI-AXIAL., del 1 de Mayo de 1999, de PLOEM, SVEN: SE PRESENTA UN SISTEMA DE CONTROL LIBRE DE COLISIONES PARA UN MANIPULADOR MULTIAXIALMENTE CONTROLABLE , QUE COMPRENDE ESENCIALMENTE UNOS BRAZOS DE SOPORTE INTERCONECTADOS […]
 BRAZO DE TELEMANIPULACION EN DOS PARTES, del 16 de Noviembre de 2008, de COMMISSARIAT A L'ENERGIE ATOMIQUE
AREVA NC: Brazo de telemanipulación, que comprende un brazo maestro manejado por un operador, un brazo esclavo que comprende un primer segmento […]
BRAZO DE TELEMANIPULACION EN DOS PARTES, del 16 de Noviembre de 2008, de COMMISSARIAT A L'ENERGIE ATOMIQUE
AREVA NC: Brazo de telemanipulación, que comprende un brazo maestro manejado por un operador, un brazo esclavo que comprende un primer segmento […]
 METODO DE TELEMANIPULACION POR TELEPRESENCIA, del 16 de Diciembre de 2007, de SRI INTERNATIONAL: EN UN SISTEMA DE TELEMANIPULACION PARA MANIPULAR OBJETOS EN UN LUGAR DE TRABAJO SITUADO UN ESPACIO REMOTO POR UN OPERADOR , COMO PUEDE SER UN SISTEMA QUIRURGICO […]
METODO DE TELEMANIPULACION POR TELEPRESENCIA, del 16 de Diciembre de 2007, de SRI INTERNATIONAL: EN UN SISTEMA DE TELEMANIPULACION PARA MANIPULAR OBJETOS EN UN LUGAR DE TRABAJO SITUADO UN ESPACIO REMOTO POR UN OPERADOR , COMO PUEDE SER UN SISTEMA QUIRURGICO […]