MÉTODO DE GENERACIÓN DE UN MODELO DE UN OBJETO PLANO A PARTIR DE VISTAS DEL OBJETO.
Método de generación de un modelo de un objeto plano a partir de vistas del objeto.
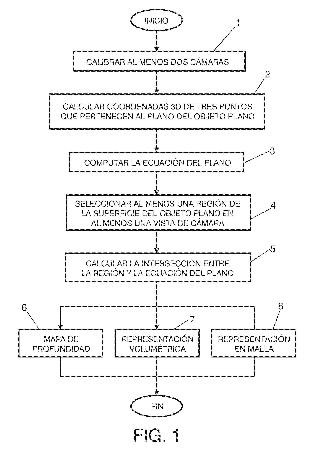
El método para la generación de un modelo de un objeto plano a partir de vistas tomadas por al menos dos cámaras calibradas es capaz de generar representaciones de dos dimensiones y volumétricas del objeto. Las representaciones pueden ser un mapa de profundidad, una representación volumétrica o una representación de malla. El método comprende las siguientes etapas básicas: calibrar al menos dos cámaras, calcular algunas coordenadas en 3D de al menos tres puntos que pertenecen al mismo plano del objeto plano, calcular la ecuación del plano comprendido en el objeto plano, seleccionar al menos una región que representa la superficie del objeto plano, en al menos una vista proporcionada por al menos una cámara y, calcular la intersección entre la región seleccionada que representa la superficie del objeto y la ecuación del plano.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031291.
Solicitante: TELEFONICA, S.A..
Nacionalidad solicitante: España.
Inventor/es: PUJOL ALCOLADO,Juan Carlos, LANDABASO DÍAZ,José Luis, DIVORRA ESCODA,Óscar, MARIMÓN SANJUAN,David.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T15/08 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 15/00 Interpretación de imagines 3D [Tridimensionales]. › Interpretación de volumen.
Fragmento de la descripción:
MÉTODO DE GENERACiÓN DE UN MODELO DE UN OBJETO PLANO A PARTIR DE VISTAS DEL OBJETO OBJETO DE LA INVENCiÓN
La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva se refiere a un método de generación de un modelo de un objeto plano a partir de vistas del objeto proporcionadas por al menos dos cámaras que toman vistas del objeto. Mediante el método de la presente invención se pueden obtener representaciones como un mapa de profundidad del objeto plano, una representación volumétrica del objeto plano y una representación en malla del objeto plano. El método de la presente invención está especialmente dirigido al modelado de objetos en tres dimensiones mediante el análisis de vistas en dos dimensiones para su posterior reconstrucción en tres dimensiones. Su aplicación va desde la tele-presencia por videoconferencia a la generación de modelos con diversos fines: análisis, educación, recreo, etc.
ANTECEDENTES DE LA INVENCiÓN
El estado de la técnica existente divulga diferentes tipos de métodos para modelar un objeto. Dichos métodos se clasifican principalmente en métodos pasivos y métodos activos. En el área de los métodos activos, se utilizan sensores tales como láser o escáneres de luz estructurada, o también cámaras del tipo Tiempo-de-Vuelo (Time-of-Flight) . Existen otras posibilidades tales como proyectar, con la ayuda de un video proyector, un patrón conocido sobre un objeto y deducir la forma del objeto mediante el análisis de la deformación sufrida por el patrón debida a la forma del objeto.
En el área de los métodos pasivos, la mayoría de las técnicas explotan la triangulación geométrica que relaciona dos o más vistas del objeto de interés.
La presente invención está en el campo de los métodos pasivos donde se encuentran las siguientes aproximaciones de modelado de objetos basados en vistas:
• Estructura desde Movimiento, SfM (Structure from Motion) , que consiste en estimar el modelo de la escena en frente de una cámara en movimiento. Sin embargo, la técnica es sólo aplicable a un conjunto de múltiples cámaras estáticas. Generalmente, un algoritmo SfM establece la correspondencia entre las vistas de un conjunto de puntos en la escena. Mediante el establecimiento de esta correspondencia, es posible triangular la posición de los puntos en las tres dimensiones del espacio en frente de una o varias cámaras. Desde este punto, existen varias posibilidades para generar un modelo de un objeto. Una posibilidad es aprovechar la triangulación para calibrar la posición de la cámara a lo largo de su movimiento o la posición de cada cámara estática. Un modelo denso de la forma de la escena puede obtenerse, por ejemplo, por medio de la Forma-desde-Estéreo (Shape from Stereo) . Otra posibilidad es asumir que la superficie entre tres puntos cualesquiera es localmente plana. Este modelo se obtiene, por lo tanto, conectando puntos en grupos de tres, por un triángulo. El conjunto de triángulos en 3D forma una malla que representa la forma del objeto. En este sentido son conocidos del estado de la técnica, métodos que reconstruyen partes del objeto plano. En primer lugar, se establecen correspondencias entre segmentos planos. Se encuentran cuatro puntos por segmento o región y después se induce una homografía. Esta homografía permite establecer la geometría epi polar entre las vistas. Finalmente, el conjunto de segmentos puede posicionarse en 3D.
• Reconstrucción volumétrica en 3D. Esta aproximación abarca desde el menos hasta el más preciso modelado. Por ejemplo, la caja que delimita el objeto real, sería un modelo demasiado tosco. Existen modelos más precisos tales como la Envoltura Convexa (Convex Hull, CH) , la Envoltura Visual (Visual Hull, VH) y la Foto Envoltura (Photo Hull, PH) . Uno de los modelos volumétricos más extendidos debido a su buena relación entre precisión y bajo coste computacional es la Envoltura Visual (VH) . La Envoltura Visual se obtiene mediante un método denominado Forma-desde-Silueta (Shape-fromSilhouette, SfS) . En una primera fase, la Forma-desde-Silueta extrae las entidades activas de la escena (siluetas del objeto) mediante un conjunto de cámaras. La Envoltura Visual se corresponde, por lo tanto, con el volumen dentro de la intersección de los conos que van desde el centro óptico de las cámaras a través de las siluetas en los planos ópticos de las cámaras. El conjunto de cámaras debe calibrarse intrínsecamente y extrínsecamente de antemano. De este modo, la calibración puede obtenerse usando el conjunto de puntos de control cuyas coordenadas se conocen automáticamente como un conjunto de puntos característicos clave, como en la aproximación de la Estructura desde Movimiento.
• Forma desde Sombreado, "SfSh" (Shape from Shading) , se ocupa de recuperar la forma desde un variación gradual del sombreado en la vista. La idea que está detrás de la Forma desde Sombreado es que la intensidad del color pueda describirse como una función de la superficie, la forma, y la dirección de la fuente de luz. La mayoría de los algoritmos SfSh asumen que la dirección de la fuente de luz es conocida.
Los métodos pasivos anteriormente descritos presentan varios inconvenientes en función del método utilizado. En el caso de los métodos basados en Estructura desde Movimiento (SfM) , los inconvenientes surgen de los objetos sin textura. De hecho, en ausencia de textura sobre la superficie del objeto, el modelo resultante es muy tosco. En el caso de textura muy limitada pero con suficientes puntos para calibrar el conjunto de cámaras, se puede utilizar el método Forma-desde-Estéreo. Sin embargo, el resultado del método anterior presenta el inconveniente de que no es capaz de aislar el objeto de los objetos que forman el fondo o que rodean al objeto que se está modelado. En el caso particular de los métodos descritos anteriormente y que se basan en encontrar cuatro puntos de un segmento y generar una homografía, todo el proceso de calibración depende de la posibilidad de establecer correspondencia entre los planos detectados, lo cual no es viable para objetos sin textura.
Por otro lado, la Envoltura Visual (Visual Hull) obtenida con un método genérico SfS depende principalmente de dos aspectos. En primer lugar, las posiciones de las cámaras determinan el rendimiento del método SfS. Otra limitación de la aplicabilidad de este método es que las siluetas se extraen por comparación con un fondo estático conocido. Esto implica que el objeto no puede estar presente en la escena cuando se captura el fondo. Consecuentemente, este método sólo es válido para objetos que pueden obtenerse o introducirse fácilmente en la escena pero no para modelar una parte de una habitación, tal como una pared, o un tablero fijo.
Por lo tanto, sería deseable encontrar un método de generación de un modelo de un objeto plano a partir de vistas del objeto que no dependiera de la textura del objeto a modelar ni de la consecuente limitación que implica la correcta calibración de las cámaras, así como de la capacidad de trasladar el objeto a modelar respecto del fondo o de la ubicación en la que se encuentre el objeto.
DESCRIPCiÓN DE LA INVENCiÓN
Para lograr los objetivos y evitar los inconvenientes indicados anteriormente, la presente invención consiste en un método para la generación de un modelo de un objeto plano a partir de las vistas del objeto. Dicho método está basado en dos conceptos: la geometría epipolar y la segmentación de la imagen. La geometría epipolar establece las relaciones geométricas entre dos
o más cámaras que capturan la misma escena. La segmentación de la imagen consiste en generar segmentos (regiones) o áreas de una imagen que tienen características similares: tales como el color.
La presente invención cubre un método que genera un modelo volumétrico de un objeto plano. El método de la presente invención aprovecha las relaciones de la geometría epipolar entre dos o más cámaras, y la segmentación de la superficie del objeto visto por dichas cámaras. El método está separado en dos grandes etapas. La primera etapa consiste en calcular la ecuación del plano en 3D que define la superficie del objeto plano. Para ello, el método de la presente invención, utiliza la triangulación de tres puntos que pertenecen al objeto plano. La segunda etapa consiste en encontrar el segmento (región) , en una o más vistas, que mejor representa al objeto. Con la calibración de las cámaras es posible encontrar el rayo...
Reivindicaciones:
1. Método de generación de un modelo de un objeto plano a partir de vistas del objeto plano, caracterizado porque genera una representación seleccionada de entre un mapa de profundidad del objeto plano, una representación volumétrica del objeto plano y una representación en malla del objeto plano, mediante al menos las siguientes etapas:
i) calibrar al menos una primera cámara y una segunda cámara; ii) calcular las coordenadas en 3D de al menos tres puntos que pertenecen a un plano del objeto plano; iii) calcular una ecuación del plano comprendido en el objeto plano; iv) seleccionar al menos una región que represente la superficie del objeto plano, en al menos un plano de imagen proporcionado por al menos una cámara; y, v) calcular una intersección entre la región seleccionada que representa la superficie del objeto y la ecuación del plano.
2. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 1, caracterizado porque la etapa i) adicionalmente comprende calcular los parámetros extrínsecos e intrínsecos de al menos la primera cámara y segunda cámara resolviendo las ecuaciones para tantos puntos en 20/30 como grados de libertad comprendan las cámaras.
3. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 1, caracterizado porque la etapa ii) adicionalmente comprende:
• seleccionar un punto y un primer punto de imagen, en el que el primer punto de imagen representa el punto seleccionado en el plano de imagen proporcionado por la primera cámara, y en el que dicho punto seleccionado está comprendido en el objeto plano;
• calcular un primer rayo que une el centro de la primera cámara con el primer punto de imagen, y también con el punto seleccionado;
• calcular la proyección del punto seleccionado sobre el plano de imagen proporcionado por la segunda cámara;
• calcular al menos un segundo rayo por medio de al menos el plano de imagen de la segunda cámara, que conecta el centro de la segunda cámara con el segundo punto de imagen y también con el punto seleccionado;
• determinar las coordenadas en 3D del punto seleccionado por medio del cálculo del punto de intersección entre el primer rayo y el menos un segundo rayo;
• repetir las etapas anteriores para al menos dos puntos más, obteniendo al menos las coordenadas en 3D de tres puntos que pertenecen al plano del objeto plano.
4. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 3, caracterizado porque la proyección del punto seleccionado sobre el plano de imagen de la segunda cámara se calcula mediante una opción de cálculo seleccionada entre manual y semi-automática.
5. Método para la generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 4, caracterizado porque la opción de cálculo manual comprende que un usuario, mediante una interfaz gráfica de usuario que muestra al menos el plano de imagen proporcionado por la segunda cámara, selecciona el punto de imagen que mejor representa al punto previamente seleccionado mediante el plano de imagen proporcionado por la primera cámara.
6. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 4, caracterizado porque la opción de cálculo semi-automático se selecciona entre los niveles semiautomáticos como un conjunto comprendido por un nivel bajo, un nivel medio y un nivel alto.
7. Método para la generación de un modelo de un objeto a partir de vistas del objeto, de acuerdo con la reivindicación 6, caracterizado porque el nivel bajo comprende las siguientes etapas:
• calcular una línea epipolar en al menos el plano de imagen proporcionado por la segunda cámara, donde dicha línea epipolar es la línea dibujada sobe el plano de imagen de la segunda cámara que representa el primer rayo por medio de la calibración de las cámaras;
• representar la línea epipolar por medio de la interfaz gráfica de usuario; y,
• seleccionar un segundo punto de imagen sobre la interfaz gráfica de usuario, donde el segundo punto de imagen es un punto seleccionado a lo largo de la línea epi polar que mejor representa el punto seleccionado mediante el plano de imagen proporcionado por la primera cámara.
8. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 6, caracterizado porque el nivel medio comprende las siguientes etapas:
a) determinar una primera área de imagen que contiene al menos el primer punto de imagen y almacenar al menos un valor de información del punto de imagen seleccionado de entre el color, la intensidad de color y una combinación de los mismos, de al menos el primer punto de imagen y cada uno de los puntos de imagen que rodea el primer punto de imagen; b) calcular una línea epipolar en al menos el plano de imagen proporcionado por la segunda cámara, donde dicha línea epipolar es la línea dibujada sobre el plano de imagen de la segunda cámara que representa el primer rayo por medio de la calibración de las cámaras; c) determinar una segunda área que contiene al menos un punto de imagen comprendido en la línea epi polar, y almacenar al menos un valor de información del punto de imagen seleccionado de entre el color, la intensidad de color y una combinación de los mismos, de al menos dicho primer punto de imagen comprendido en la línea epipolar y cada uno de los puntos de imagen que rodean el punto de imagen comprendido en la línea epipolar; d) comparar el valor de la información del punto de imagen de la primera área de la imagen con el valor de la información del punto de imagen de la segunda área de imagen; e) repetir las etapas c) y d) para cada uno de los puntos de imagen que forman la línea epipolar; y, f) seleccionar un segundo punto de imagen de entre un grupo de puntos de imagen formado por los puntos de imagen obtenidos en cada repetición por medio de una opción seleccionada entre manual y automática; la forma automática comprende seleccionar el segundo punto de imagen como el punto de imagen del total de puntos de imagen que comprende la línea epipolar, para lo cual la segunda área de imagen del punto de imagen comprende un índice de reproducción de la primera área de imagen mayor que un umbral; la forma manual comprende resaltar con un color predeterminado el segundo punto de imagen, que se selecciona como el punto de imagen del total de puntos de imagen que comprende la línea epipolar, para el cual la segunda área de imagen del segundo punto de imagen comprende un índice de reproducción de la primera área de imagen mayor que un umbral, y seleccionar un punto de entre los resaltados por la interfaz gráfica del usuario.
9. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 6, caracterizado porque el nivel alto comprende las siguientes etapas:
a) determinar un conjunto de puntos característicos en al menos los planos de imagen proporcionados por la primera cámara y la segunda cámara, siendo dichos puntos característicos los situados en esquinas y bordes del objeto, y en las superficies de objetos con textura, los puntos obtenidos por un algoritmo de detección de esquinas; b) comparar el primer punto de imagen con un punto característico determinado anteriormente; c) determinar una primera área de imagen que contenga al menos el primer punto de imagen y almacenar al menos un valor de información del punto de imagen seleccionado de entre el color, la intensidad de color y una combinación de los mismos para al menos el primer punto de imagen y cada uno de los puntos de imagen que rodea al primer punto de imagen; d) calcular una línea epipolar en al menos el plano de imagen proporcionado por la segunda cámara, donde la línea epipolar es la línea dibujada sobre el plano de imagen de la segunda cámara que representa el primer rayo por medio de la calibración de las cámaras;
e) determinar una segunda área de imagen que comprende al menos un
punto de imagen contenido en la línea epipolar, y almacenar al menos
un valor de información del punto de imagen seleccionado de entre el
color, la intensidad de color y una combinación de los mismos de al
menos el punto de imagen contenido en la línea epiolar y cada punto de
imagen que rodea el punto de imagen contenido en la línea epipolar;
f) comparar el valor de la información del punto de imagen de la primera
área de imagen con el valor de la información del punto de imagen de la
segunda área de imagen;
g) repetir las etapas e) y f) para cada uno de los puntos de imagen que
forman la línea epipolar; y,
h) seleccionar un segundo punto de imagen de entre un grupo de
puntos de imagen formado por los puntos de imagen obtenidos en cada
una de las repeticiones por medio de una opción seleccionada entre
manual y automática; la forma automática comprende seleccionar el
segundo punto de imagen como el punto de imagen del total de puntos
de imagen que comprende la línea epipolar, para lo cual la segunda
área de imagen del punto de imagen comprende un índice de
reproducción de la primera área de la imagen mayor que un umbral; la
forma manual comprende resaltar con un color predeterminado el
segundo punto de imagen, que se selecciona como el punto de imagen
del total de puntos de imagen que comprende la línea epi polar, para lo
cual la segunda área de imagen del segundo punto de imagen
comprende un índice de reproducción de la primea área de imagen
mayor que un umbral y seleccionar un punto de entre los resaltados
mediante la interfaz gráfica del usuario.
10. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 7, 8 ó 9, caracterizado porque el rayo que une el centro de la primera cámara con el punto seleccionado y al menos el rayo que une el centro de la segunda cámara con el punto seleccionado están definidos por las ecuaciones de línea respectivas mediante las siguientes etapas:
• obtener la localización en 3D del centro de la cámara del sistema de coordenadas calibrado; • obtener la localización en 3D del primer punto de imagen y del segundo punto de imagen que representan el mismo punto seleccionado en al menos el plano de imagen de la primera cámara y el plano de imagen de la segunda cámara, respectivamente; y,
• determinar al menos una primera ecuación de línea y una segunda ecuación de línea, estando la primera ecuación de línea descrita por el vector que une la localización en 3D del centro de la primera cámara con la localización en 3D del primer punto de imagen y estando la segunda ecuación descrita por el vector que conecta la localización en 3D del centro de la segunda cámara con la localización en 3D del segundo punto de imagen.
11. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 10, caracterizado porque la determinación de las coordenadas de al menos un punto en 3D mediante el cálculo del punto de intersección entre el primer rayo y al menos el segundo rayo comprende adicionalmente:
• establecer las coordenadas de al menos un punto en 3D cuando el punto de intersección entre el primer rayo y el al menos segundo rayo pertenece simultáneamente a la primera ecuación y a la segunda ecuación que determinan dicho primer rayo y dicho al menos segundo rayo respectivamente; y,
• calcular las coordenadas de un punto en 3D cuya distancia a dicho primer rayo y dicho al menos segundo rayo es mínima cuando no existe punto de intersección entre dicho primer rayo y dicho al menos segundo rayo.
12. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 10 u 11, caracterizado porque la etapa iii) adicionalmente comprende:
• calcular la expresión del plano determinada por la siguiente ecuación:
8N. (X -xo) + bN· (Y -Yo) + CN. (Z -zo) = O donde xo, yo y Zo son las coordenadas del punto en 3D que pertenece al plano del objeto y aN, bN y CN son las coordenadas de un vector N normal al plano; el vector N normal al plano es el producto vectorial de
dos vectores pertenecientes al plano y definidos por al menos tres
puntos en el plano del objeto plano.
13. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 8 ó 9, caracterizado porque la etapa que comprende seleccionar al menos una región que represente la superficie del objeto, en al menos un plano de imagen proporcionado por al menos una cámara, se realiza mediante una opción seleccionada entre manual y automática; comprendiendo la opción manual, al menos, las siguientes etapas:
• calcular una sub-región que comprende seleccionar cada uno de los puntos de imagen que rodean a un punto de imagen seleccionado por medio de la interfaz gráfica de usuario, en el que dichos puntos de imagen cumplen con un criterio de similitud; siendo el criterio de similitud una comparación predeterminada entre los valores de información del punto de imagen seleccionados de entre el color y la intensidad de color de cada uno de dichos puntos de imagen que rodean el punto de imagen;
• repetir la etapa anterior para tantas sub-regiones como establezca el usuario; y;
• formar una región del objeto plano por medio de la conexión de las regiones calculadas anteriormente; y, comprendiendo la opción automática, al menos, las siguientes etapas:
• seleccionar al menos dos puntos de imagen en el mismo plano de imagen que mejor representen los al menos dos puntos del objeto plano, en el que dichos al menos dos puntos de imagen se seleccionan de entre los dos primeros puntos de imagen de la primera cámara y los dos segundos puntos de imagen en el plano de imagen de al menos la segunda cámara;
• almacenar los valores de la información de los puntos de imagen seleccionados entre el color y la intensidad de color de los puntos de imagen comprendidos en el segmento de línea que conecta los dos puntos de imagen seleccionados en la etapa anterior;
• calcular un histograma de dos dimensiones que representa en una
dimensión todos los valores de los posibles valores de información de los puntos de imagen que tiene un punto de imagen en el dominio del espacio, y en la otra dimensión, el número de veces que un cierto valor de información de punto de imagen seleccionado entre el color y la intensidad de color ha aparecido en el segmento de línea; de modo que el histograma presenta picos para los valores de información de puntos de imagen seleccionados entre los colores e intensidad de color más repetidos;
• identificar, para cada pico del histograma, los puntos de imagen que, comprendidos en el segmento de línea, tienen los valores de información de puntos de imagen de color e intensidad de color representados en cada uno de los picos;
• calcular una sub-región para cada uno de los puntos de imagen identificadores que se forman por los puntos de imagen que rodean al punto de imagen identificador y que cumplen con el criterio de similitud;
• repetir las etapas anteriores para tantas sub-regiones como puntos de imagen identificadores se hayan identificado; y,
• formar una región del objeto plano mediante la unión de las subregiones calculadas anteriormente.
14. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 13, caracterizado porque calcular una intersección entre la región que representa la superficie del objeto y la ecuación del plano comprende adicionalmente las siguientes cuatro subetapas:
• encontrar, para cada región formada en el plano de imagen de la primera cámara, al menos un rayo que pasa a través del centro de la primera cámara y un punto comprendido en cada una de las regiones;
• encontrar el punto de intersección entre dicho al menos un rayo y el plano, donde dicho punto de intersección representa las coordenadas en 3D de un punto que pertenece al objeto plano real;
• repetir las dos sub-etapas anteriores para cada uno de los puntos que forman la región y formar una nube de puntos cuando se forma la región para al menos dos puntos;
• unir los puntos de intersección encontrados por al menos la primera
cámara dentro de la región seleccionada.
15. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque el método adicionalmente comprende para llevar a cabo la representación del mapa de profundidad del objeto plano las siguientes etapas:
• seleccionar una región plana perteneciente al objeto a modelar;
• analizar en un plano de imagen de una cámara específica, los puntos de imagen de las regiones correspondientes a dicha región plana;
• calcular, para cada punto, la distancia desde el centro de la cámara a cada punto de la región plana;
• repetir las dos etapas anteriores para cada punto perteneciente a la región plana; y,
• representar el mapa de profundidad con las distancias anteriormente calculadas y otorgando un valor seleccionado entre cero y un primer valor predeterminado a todos los puntos que estén comprendidos en la región plana seleccionada.
16. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque el método comprende para realizar la representación volumétrica del objeto plano las siguientes etapas:
• definir un sistema común de coordenadas mediante la calibración de una disposición de cámaras formada por al menos dos cámaras;
• definir una caja delimitante que comprende el objeto plano a modelar con referencia al sistema de coordenadas definido;
• dividir la caja delimitante en pequeños elementos de volumen denominados voxel;
• determinar para cada voxel comprendido en la caja delimitante si dicho voxel está ocupado mediante un algoritmo seleccionado entre un algoritmo sencillo y un algoritmo perfeccionado; y,
• representar la representación volumétrica mediante la representación de los voxel ocupados.
17. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 16, caracterizado porque el algoritmo sencillo comprende:
• calcular las coordenadas del centroide de cada voxel;
• calcular la distancia desde el centroide a un punto de la nube de puntos; y,
• etiquetar el voxel como "ocupado" si la distancia calculada anteriormente entre el centroide y el punto de la nube de puntos es inferior a un umbral predeterminado, y etiquetar el voxel como "no ocupado" si dicha distancia es superior al umbral predeterminado.
18. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 16, caracterizado porque el algoritmo perfeccionado comprende:
• calcular las coordenadas del centroide de cada voxel;
• calcular la distancia desde el centroide al centro de la cámara;
• identificar el punto en la nube de puntos con la distancia mínima al centroide y la longitud del rayo que pasa a través del voxel y el centro de la cámara;
• calcular la distancia entre el punto identificado en la nube de puntos y el centro de la cámara;
• etiquetar el voxel como "ocupado" si la distancia calculada anteriormente entre el centroide y el centro de la cámara es al menos igual que la distancia entre el punto identificado en la nube de puntos y el centro de la cámara y etiquetar el voxel como "no ocupado" en caso contrario; y
• aplicar mejoras sobre al algoritmo mejorado mediante unas mejoras seleccionadas entre:
o una intersección por volúmenes que se obtiene mediante las dos siguientes sub-etapas:
• determinar la ocupación de los voxel por medio del centro de la cámara proporcionado por la primera cámara y al menos la segunda cámara independientemente; y,
• etiquetar el voxel como "ocupado" si y sólo si está etiquetado como "ocupado" en cada una de las vistas proporcionadas por la primera
cámara y al menos la segunda cámara;
o una ocupación por grosor, que comprende las siguientes sub-etapas:
• seleccionar el grosor "T" del objeto plano;
• calcular las coordenadas del centroide de cada voxel;
• calcular la distancia desde el centroide al centro de la cámara;
• identificar el punto en la nube de puntos con la distancia mínima al centroide y la longitud del rayo que pasa a través del voxel y el punto en el centro de la cámara;
• calcular la distancia entre el punto identificado en la nube de puntos y el centro de la cámara; y
• etiquetar el voxel como ocupado si la distancia calculada anteriormente entre el centroide y el centro de la cámara es al menos igual que la distancia entre el punto identificado en la nube de puntos y el centro de la cámara, y más pequeño que la distancia entre el punto identificado en la nube de puntos y el centro de la cámara más el grosor "T" y en caso contrario etiquetar el voxel como "no ocupado";
o intersección por volúmenes con ocupación por el grosor que obtiene la intersección de los diferentes volúmenes mediante las siguientes subetapas:
• determinar la ocupación de los voxel por medio del centro de la cámara proporcionado por la primera cámara y el menos la segunda cámara independientemente;
• seleccionar el grosor "T" del objeto plano;
• calcular las coordenadas del centroide de cada voxel;
• calcular la distancia desde el centroide al centro de la cámara;
• identificar el punto en la nube de puntos con la distancia mínima al centroide y la longitud del rayo que pasa a través del voxel y el punto en el centro de la cámara;
• calcular la distancia entre el punto identificado en la nube de puntos y el centro de la cámara;
• etiquetar, en cada vista proporcionada por la primera cámara y la segunda cámara el voxel como "ocupado" si la distancia calculada anteriormente entre el centroide y el centro de la cámara es al menos igual que la distancia entre el punto identificado en la nube de puntos y el centro de la cámara y menor que la distancia entre el punto
identificado en la nube de puntos y el centro de la cámara más el grosor "T" y etiquetar el voxel como "no ocupado" en caso contrario; y,
• etiquetar el voxel como "ocupado" si y sólo si está etiquetado como
"ocupado" en cada una de las vistas proporcionadas por la primera 5 cámara y al menos la segunda cámara;
19. Método de generación de un modelo de un objeto plano a partir de vistas del objeto, de acuerdo con la reivindicación 1, caracterizado porque el método adicionalmente comprende las siguientes etapas para realizar la
representación en malla del objeto plano:
• determinar tres puntos por superficie localmente plana comprendida en el objeto plano;
• unir los tres puntos formando un triángulo;
• unir los triángulos obtenidos formando una malla; y, 15 • representar la malla.
Patentes similares o relacionadas:
Método y sistema de juego para proyectar imágenes volumétricas en una escena física, del 25 de Diciembre de 2019, de Triotech Amusement Inc: Un sistema de juego que proyecta imágenes volumétricas en una escena física , incluyendo la escena física un fondo y una pluralidad de decorados […]
Malla adaptativa de resolución para realizar metrología en 3-d de un objeto, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un metodo (200, 200') para generar una malla adaptativa de resolucion para la metrologia 3-D de un objeto , que comprende: recibir […]
 Voxelización de una malla, del 29 de Mayo de 2019, de Biosense Webster (Israel), Ltd: Un procedimiento para la representación tridimensional (3D), que comprende:
recibir un grupo de triángulos 3D que definen una malla triangular […]
Voxelización de una malla, del 29 de Mayo de 2019, de Biosense Webster (Israel), Ltd: Un procedimiento para la representación tridimensional (3D), que comprende:
recibir un grupo de triángulos 3D que definen una malla triangular […]
Método para procesar datos de imagen que representan un volumen tridimensional, del 1 de Abril de 2019, de Gyger, Cyrill: Un método para el procesamiento de los datos de imagen que representan un volumen tridimensional, comprendiendo los datos valores de imagen para una cuadrícula […]
Procedimiento de discriminación y de identificación de objetos de una escena por procesamiento de imagen en 3D, del 14 de Marzo de 2019, de THALES: Procedimiento de discriminación y de identificación por un procesamiento de imagen en 3D de un objeto en una escena compleja, caracterizado porque incluye las siguientes […]
PROCEDIMIENTO DE RECONSTRUCCIÓN FOTOGRÁFICA EN FABRICACIÓN ADITIVA POR FUSIÓN DE POLVO METÁLICO, del 2 de Febrero de 2018, de MONGE VILLALOBOS, Fernando: Procedimiento de reconstrucción fotográfica en fabricación aditiva por fusión de polvo metálico para llevar a cabo la reconstrucción virtual de la dimensión […]
Proyecciones de superficies estereotácticas de profundidad variable, del 10 de Enero de 2018, de GE HEALTHCARE UK LIMITED: Un método de proyección de superficie estereotáctica tridimensional, 3D SSP, de una imagen de PET/SPECT de un cerebro generada mediante el uso de un agente de formación […]
 Representación de datos de formación de imágenes de diagnóstico en un mapa tridimensional, del 22 de Enero de 2016, de BIOSENSE WEBSTER, INC.: Aparato para mapear una estructura en un cuerpo de un sujeto , que comprende:
un dispositivo para formación de imágenes , adaptado para capturar una imagen tridimensional […]
Representación de datos de formación de imágenes de diagnóstico en un mapa tridimensional, del 22 de Enero de 2016, de BIOSENSE WEBSTER, INC.: Aparato para mapear una estructura en un cuerpo de un sujeto , que comprende:
un dispositivo para formación de imágenes , adaptado para capturar una imagen tridimensional […]