MÉTODO DE DETECCIÓN DE SEÑALES ULTRASÓNICAS CON MODULACIÓN DSSS TOLERANTE AL EFECTO DOPPLER.
El uso de técnicas de modulación de espectro expandido por secuencia directa (DSSS) en los sistemas sensoriales ultrasónicos introduce importantes mejoras respecto a los sistemas clásicos basados en detección de envolvente.
En este tipo de sistemas, la detección de señales se realiza mediante el uso de filtros acoplados (correladores) que convolucionan la señal recibida con la versión invertida en el tiempo de los patrones emitidos. Este proceso de comparación de patrones es especialmente sensible al movimiento del emisor o del receptor de señales ultrasónicas y su efecto Doppler asociado, dada la baja velocidad de propagación de estas señales comparada con la de las ondas electromagnéticas. Esta invención presenta un nuevo método de detección de señales ultrasónicas con modulación DSSS que permite llevar a cabo la detección de estas señales cuando el emisor o el receptor se encuentran en movimiento, así como realizar una estimación de la velocidad de este movimiento.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230049.
Solicitante: UNIVERSIDAD DE ALCALA..
Nacionalidad solicitante: España.
Inventor/es: HERNANDEZ ALONSO,ALVARO, UREÑA UREÑA,Jesús, ÁLVAREZ FRANCO,Fernando Javier, MORENO ZAMORA,José Antonio, PÉREZ RUBIO,María Del Carmen.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S15/32 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › que utilizan la transmisión de ondas continuas, tanto moduladas en amplitud, en frecuencia o en fase, como no moduladas.
- H04B1/707 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04B TRANSMISION. › H04B 1/00 Detalles de los sistemas de transmision, no cubiertos por uno de los grupos H04B 3/00 - H04B 13/00; Detalles de los sistemas de transmisión no caracterizados por el medio utilizado para la transmisión. › que usa modulación en secuencia directa.
Fragmento de la descripción:
SISTEMA DE DETECCIÓN DE SEÑALES ULTRASÓNICAS CON MODULACIÓN DSSS TOLERANTE AL EFECTO DOPPLER
SECTOR DE LA TÉCNICA
La invención pertenece al área técnica de la tecnología electrónica y de las comunicaciones. Dentro de este área, y atendiendo a su aplicación, se encuadra en el campo de los sistemas sensoriales ultrasónicos.
ESTADO DE LA TÉCNICA
Los sistemas sensoriales ultrasónicos basados en el cálculo de distancias, llevan a cabo esta función midiendo el tiempo de propagación de una señal ultrasónica entre el emisor y el receptor y multiplicando este tiempo por la velocidad de propagación de las ondas acústicas en el medio. Las versiones más simples de este tipo de sistemas emiten pulsos ultrasónicos que son detectados por el receptor mediante un proceso de rectificación- integración-umbralización [Polaroid Corporation. Ultrasonic Ranging Systems, 1991]. Estos sistemas son muy sensibles al ruido de ancho de banda estrecho, son poco precisos y además no permiten la emisión simultánea de varias señales con la capacidad de discriminar entre ellas.
La incorporación de técnicas de modulación de espectro expandido en los sistemas sensoriales ultrasónicos se produce a comienzo de los años 80 en los sistemas de evaluación no destructiva de materiales [C. M. Elias. An ultrasonic pseudorandom signal-correlation system. IEEE Transactions on Sonics and Ultrasonics, SU-27(l):l-7, enero 1980], una década más tarde en el campo del sonar aéreo [K.-W. Jórg y M. Berg. First results in eliminating crosstalk and noise by applying pseudo-random sequences to mobile robot sonar sensing. En Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS96), páginas 292-297, Osaka (Japón), noviembre 1996], y otra década más tarde en los sistemas de posicionamiento local [M. Hazas y A.Ward. A high performance privacy-oriented location system. En Proc. of the lst IEEE International Conference on Pervasive Computing and Communications (PerCom 2003), páginas 216-223, Dallas (Estados Unidos), marzo 2003.]. Hoy en día existe un elevado número de sistemas basados en este esquema de modulación que resuelven los
inconvenientes de los sistemas basados en detección de envolvente. Sin embargo, todos estos sistemas basan su correcto funcionamiento en la suposición de que tanto los emisores como los receptores son estáticos o se mueven a muy baja velocidad. La relativamente baja velocidad de propagación de las ondas acústicas con respecto a la de las ondas electromagnéticas tiene como consecuencia que el desplazamiento Doppler que sufren las primeras sea mucho más acusado con idénticas velocidades de emisor y/o receptor, lo que puede provocar que estas señales sean completamente irreconocibles por el receptor en un sistema basado en modulación de espectro expandido por secuencia directa ([Direct Sequence Spread Spectrum - DSSS) con emisores y/o receptores móviles. Esta invención describe un método de detección de estas señales tolerante al Doppler que permite no sólo detectar estas señales sino también realizar una estimación de la velocidad relativa entre los emisores y el receptor.
EXPLICACIÓN
Esta invención propone un nuevo método de detección de señales ultrasónicas con modulación DSSS. El esquema DSSS consiste en la modulación por desplazamiento de fase binaria (Binary Phase Shift Keying - BPSK) con un símbolo formado por NC ciclos de una portadora senoidal de frecuencia fe de una familia de códigos binarios pseudoaleatorios con buenas propiedades de correlación. Para códigos binarios de longitud L, la duración total te de las señales moduladas (patrones de emisión) viene dada por:
NC -L
**(Ver fórmula)**El espectro de estos patrones de emisión p(t) se caracteriza por expandirse a lo largo de un rango de frecuencias relativamente amplio, lo que les confiere las propiedades resaltadas en la sección anterior.
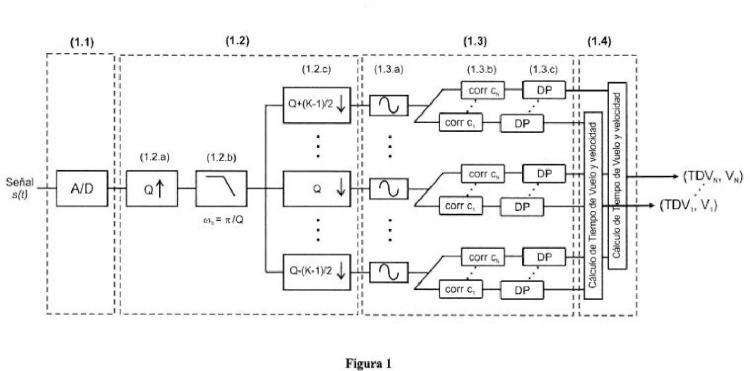
El elemento fundamental del método de procesamiento propuesto consiste en un banco de K filtros multitasa (con K impar) cuyo objetivo es compensar el desplazamiento Doppler de la señal recibida causado por el movimiento de los emisores y/o del receptor. La señal recibida s(t) es en primer lugar muestreada a una frecuencia fs, para
obtener así la señal discreta en el tiempo sfnj con espectro S(co). Esta señal es interpolada con factor de interpolación Q mediante la inclusión de Q-l ceros entre dos valores consecutivos de s[n]. Se obtiene así una nueva señal sifmj, con m=n/Q, cuyo espectro, Si(a>) es una versión comprimida un factor Q del espectro S(a>) , esto es:
Si(a>) = S(a>Q)
La señal interpolada sifmj es filtrada con un filtro paso-baja cuya función de transferencia Hlp(co) viene dada por:
Hlp(o>) =
Q
0
0 < |<y| < n / Q en otro caso
obteniéndose así una nueva señal sffm] cuyo espectro Sf(a>) viene dado por:
0 en otro caso
Esta señal se lleva a continuación a un banco de K diezmadores con factor de diezmado Q-k+(K+l)/2, para k=[l,2,...,K], de donde se obtienen K señales sdkfl], cuyos espectros Sdk(co) vienen dados por:
| \ Q S | í co-Q \ | |
| Sdk(aj) = ' | Q + (K + l)/2-k~ | lQ + (K + l)/2~k) |
| 0 |
0 < \a>\ < n en otro caso
El objetivo de este banco de filtros multitasa es, como se ha indicado anteriormente, compensar el desplazamiento Doppler provocado por el movimiento de los emisores y/o el receptor. Si la señal recibida s(t) ha sido emitida como un patrón p(t) por un emisor que se mueve hacia el receptor a una velocidad ve, y este receptor se mueve a su vez hacia el emisor a una velocidad vr1, el espectro de s(t) está relacionado con el del patrón original p(t) como:
S((o) = P(ü)
c + vr
1 Las velocidades ve y vr se consideran negativas cuando son de alejamiento.
donde c es la velocidad de propagación de las ondas acústicas en el medio. Como ya se ha visto anteriormente, el espectro de las señales de salida de los diezmadores viene
dado por:
Sdk{co) = cte S
f
co-Q Q + (K + l)/2-k
= P
(o-
c-ve
Q + (K + Y)/2-kc + vr
de modo que el desplazamiento en frecuencia provocado por el movimiento de los
emisores y/o el receptor se cancela si:
Q _c + vr
Q + (K + \)!2-k c-ve
Q =
k
£ + 1^ 2 ,
c + vr ve + vr
A' + 1n\ c + vr 2 ) vrel
donde vrel= vr+ve es la velocidad relativa del emisor respecto del receptor. Si, como sucede en la práctica, c >>|vr|, es posible simplificar la expresión anterior para tener:
Q
K +1
vrel
o bien, resolviendo para la velocidad relativa emisor-receptor:
\
Av con k = [ 1,2,
vrelk «
| f, K + l) | c | ( | AT + 1") |
| k-------- v 2 , | Q~ | k K | 2 J |
,K]
donde se ha definido la resolución Doppler del sistema como:
Av =
Q
que es la diferencia de valor entre velocidades relativas cuyo efecto corrigen dos ramas vecinas del sistema de detección.
Las señales de salida de los diezmadores son sometidas a un proceso de detección por filtrado adaptado de los patrones DSSS emitidos. Este proceso se realiza en tres etapas:
1. Correlación con el símbolo de modulación, formado por NC ciclos de una portadora senoidal de frecuencia fe.
2. Correlación en paralelo con la familia de N códigos binarios pseudoaleatorios que constituyen la base de los patrones de emisión DSSS.
3. Detección de picos de las señales de salida de los correladores binarios.
Al final de este proceso se obtienen un conjunto de KxN parejas de datos (tk,i, pki; k=[l,2,...,K], i=[l,2,...N]), siendo tk,i el instante de ocurrencia del pico de correlación obtenido en la rama k para el código i y pki la magnitud de este pico. Finalmente, las K parejas (tk,i, pki) asociadas a un mismo código se llevan a una etapa de cálculo de tiempo de propagación y velocidad relativa que realiza dos computaciones:
1. Calcula el tiempo de propagación del código i (tp¡) como el tiempo de ocurrencia del pico de correlación de mayor magnitud asociado a este código (tm,i) menos la duración del patrón de emisión (te), es decir:
tp, = L,i -te ; conpm¡ = max(pk¡) Vk
2. Calcula la velocidad relativa del emisor i respecto del receptor como una media...
Reivindicaciones:
1. Un sistema de detección de señales ultrasónicas con modulación DSSS, tolerante a efecto Doppler, basado: en un banco de filtros multitasa; en un bloque de detección; y en un bloque de estimación de tiempos de propagación y velocidades relativas para emisores y/o receptores en movimiento. El banco de filtros multitasa para compensar el efecto Doppler consiste en un interpolador lineal de factor Q con arquitectura segmentada, en un filtro paso-bajo con frecuencia de corte en n/Q, y en un banco de K diezmadores con una arquitectura basada en un multiplexor y un contador de módulo variable. El bloque de detección de las secuencias emitidas consiste en un banco de K filtros acoplados al símbolo de la modulación para K velocidades de referencia, un banco de KxN filtros acoplados a las N secuencias binarias pseudoaleatorias a detectar para cada emisor a cada una de las K velocidades de referencia, y un banco de KxN detectores de los máximos de correlación; se dispone de un pico de correlación para cada una de las K velocidades de referencia, en cada uno de los N emisores. El bloque de estimación de tiempos de propagación y velocidades relativas para emisores y/o receptores en movimiento se basa en la media ponderada de las K velocidades de referencia de cada emisor con respecto al receptor, utilizando como pesos de ponderación la magnitud de los K picos de correlación detectados en cada filtro acoplado para cada una de las velocidades de referencia consideradas.
Patentes similares o relacionadas:
Aparato de estación móvil de comunicación por radio y procedimiento de comunicación por radio, del 20 de Mayo de 2020, de OPTIS WIRELESS TECHNOLOGY, LLC: Un aparato de estación móvil que comprende: una sección de recepción por radio configurada para recibir una señal de control procedente de una estación base; una unidad […]
Aparato, método y producto de programa informático que proporciona multiplexación para canal de control de datos no asociados, del 22 de Abril de 2020, de Nokia Technologies OY: Un método para multiplexación de señalización de control de datos no asociados de enlace ascendente, que comprende: usar un desplazamiento cíclico de una secuencia predeterminada […]
 Módulo para controlar la compatibilidad electromagnética dentro de una señal cdma recibida por un receptor de datos cdma, del 25 de Marzo de 2020, de ALSTOM Transport Technologies: Modulo para verificar la compatibilidad electromagnetica dentro de una senal CDMA recibida por un receptor de datos CDMA ,
la senal CDMA recibida que comprende […]
Módulo para controlar la compatibilidad electromagnética dentro de una señal cdma recibida por un receptor de datos cdma, del 25 de Marzo de 2020, de ALSTOM Transport Technologies: Modulo para verificar la compatibilidad electromagnetica dentro de una senal CDMA recibida por un receptor de datos CDMA ,
la senal CDMA recibida que comprende […]
Sistema de comunicación, estación de telefonía móvil, estación base, método de decisión de respuesta, método de decisión de configuración de los recursos y programa, del 22 de Enero de 2020, de NEC CORPORATION: Un sistema de comunicaciones, que comprende una estación base y estaciones de telefonía móvil , en el que dicha estación base recibe un preámbulo a través […]
Asignación de canales de control, del 4 de Diciembre de 2019, de PANASONIC CORPORATION: Un aparato de estación base, que comprende: una unidad de asignación configurada para asignar un canal de control a uno o más elementos […]
Espacio de búsqueda basado en un tamaño de agregación de elementos de canal de control, del 4 de Diciembre de 2019, de OPTIS WIRELESS TECHNOLOGY, LLC: Un circuito integrado para una estación móvil , que comprende: un decodificador configurado para decodificar un canal de control de enlace […]
Métodos, aparatos y sistema para la comunicación de espectro ensanchado asíncrona, del 23 de Octubre de 2019, de AGENCE SPATIALE EUROPEENNE: Un método de recepción de paquetes de datos transmitidos de forma asíncrona por una serie de terminales de usuario (ST) utilizando un protocolo de acceso al medio Aloha ensanchado, […]
Señalización de información de potencia para transmisión MIMO en un sistema de comunicación inalámbrica, del 2 de Octubre de 2019, de QUALCOMM INCORPORATED: Un aparato de comunicación inalámbrica, que comprende: medios para determinar información de potencia indicativa de la potencia total para […]