Método de detección de blancos, por velocidad, mediante radares de alta resolución.
Método de detección de blancos, por velocidad, mediante radares de alta resolución.
La presente invención se refiere a un método de detección de blancos, por velocidad, mediante radares de alta resolución que comprende las siguientes etapas:
(i) realizar la suma del valor absoluto del número de M rampas, en función de los parámetros del radar y la velocidad que se quiera detectar,
(ii) pasar por un filtro paso alto la señal integrada para eliminar el nivel de continua y otras componentes de muy baja frecuencia que la acompañan,
(iii) pasar la señal, obtenida en la etapa anterior, por un filtro paso bajo, de frecuencia de corte normalizada fc.
(iv) pasar la salida del filtro de la etapa anterior por un comparador que compara la señal con un umbral (T1) cuyo valor será el eficaz de la señal en ausencia de blanco,
(v) dividir la señal detectada como posible blanco (xfilt(k)) por la de entrada (xint(k)).
El presente método permite proporcionar la velocidad de los blancos, independientemente del número de blancos que se encuentren en el escenario.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201201181.
Solicitante: UNIVERSIDAD DE LAS PALMAS DE GRAN CANARIA.
Nacionalidad solicitante: España.
Inventor/es: DORTA NARANJO,BLAS PABLO, FERRER BALLESTER,Miguel Ángel, CARMONA DUARTE,María Cristina.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/50 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › Sistemas de medida basados en el movimiento relativo del blanco.
Fragmento de la descripción:
Método de detección de blancos, por velocidad, mediante radares de alta resolución
La presente invención se refiere a un método para la detección de blancos en movimiento que permite obtener una salida "distancia-velocidad" de los blancos detectados, permitiendo ordenarlos de forma aproximada por velocidad.
Antecedentes de la invención
Existe una amplia bibliografía sobre la selección de blancos en movimiento en la que se muestra diferentes técnicas para reducir los efectos de las interferencias: unas basadas en sistemas de indicación de blancos móviles como tal (MTI o Moving Target Indication) y otras basadas en sistemas Doppler. Ambas técnicas presentan limitaciones cuando se 10 aplican en radares de alta resolución. Las técnicas MTI tradicionales (Levanon, 1988; Skolnik, 2001) dejan de ser efectivas debido a que el blanco, en movimiento, transita por más celdas al aumentar la resolución. En el caso de los sistemas basados en imágenes Doppler (Carretero 2011; Calvo, 2007) la desventaja radica en requerir un alto coste computacional (matrices de gran tamaño) especialmente cuando se quiere detectar blancos 15 en una región muy extensa. Además cuando se utilizan con radares HRR se produce el problema de "la migración de celdas", consistente en que la imagen Doppler se ensancha, al no permanecer los puntos del blanco en la misma celda durante el tiempo que se requiere para procesar la imagen Doppler. Para resolver este problema se han propuesto nuevas técnicas que detectan la migración de celdas (Deudon et al., 2010; Nanzhi et al., 2001; 20 Muñoz et al., 2006b; Muñoz et al., 2008) pero que requieren mayor carga computacional.
Otras técnicas que se utilizan para predecir la posición siguiente del blanco son los filtros de seguimiento (Track Smoothing) de tipo "a-P" o los "Kalman" (Skolnik, 2001, Zhang et al., 2004; Papic et al., 2006; Ristic et al., 2004). Las técnicas TBD (seguimientos antes de la detección) se han mejorado mediante el seguimiento de blancos extensos (Boers and 25 Driessen, 2006), utilizando la información de la fase de la señal (Davey et al., 2012), o basándose en imágenes en dos dimensiones aplicando la transformada multidimensional Hough para buscar la trayectoria del blanco (Moyer et al., 2011). Todas las técnicas enumeradas presentan la desventaja de tener demasiada carga computacional sobre todo cuando el blanco realiza maniobras rápidas.
Otro método empleado para la estimación de la velocidad, es calcular la velocidad y aceleración del blanco una vez que este ha sido detectado. La medida de la velocidad en estos casos se realiza a partir de la medida de las distancias al blanco en diferentes rampas,
por el estudio del ancho de la imagen doppler del blanco o mediante técnicas para en secuencias de imágenes distancia-doppler. Ya existen radares que permiten obtener imágenes Doppler de los blancos en movimiento (Wehner, 1995; Campo, 2008). En este caso el radar permanece estático, y es el movimiento del blanco el que permite obtener una imagen del mismo. Con un radar FMCW es posible obtener o la distancia de varios blancos o la velocidad de un único blanco. Un ejemplo de radar FMCW utilizado para medir la velocidad son los radares utilizados en el control de velocidad del tráfico en carreteras.
Una vez presentadas las técnicas utilizadas de detección de blancos en movimiento, se desea plantear la mejora de la relación señal a ruido del eco recibido y, por tanto, del alcance del radar. Uno de los métodos más extendidos es la técnica de integración. Dependiendo del tipo de señal utilizada se puede clasificar en integración coherente (se conoce amplitud y fase) o no coherente (solo se conoce la amplitud) (Levannon, 1988). Con ambas técnicas se puede realizar la detección con un vector.
Otro aspecto destacado en el análisis de la señal radar es conocer la evolución temporal del clutter cuando se recibe la señal. Investigaciones recientes han estudiado la naturaleza no- estacionaria del clutter de mar (Carretero, 2011; Melief et al., 06).
El documento de patente EP 2479585 Al hace referencia a un método que permite obtener la velocidad después de calcular la posición. Es decir, primero tiene que detectar el blanco, después calcular la posición y después calcular la velocidad. Además necesita trabajar con imágenes, lo que complica todo el procesado. Con el método propuesto se detectan los blancos que se mueven a una velocidad superior a la deseada, y da automáticamente la velocidad aproximada. El método no trabaja con imágenes sino con vectores, por lo que es más rápido.
El documento de patente US 6064924 A hace referencia a un método que permite realizar una estimación del movimiento futuro. El método propuesto no necesita usar algoritmos de predicción, sino que se basa en la información que se encuentra en un breve instante de tiempo de señal integrada, no pretende predecir la trayectoria, solo detectar blancos en movimiento.
El método propuesto permite proporcionar la velocidad de los blancos, independientemente del número de blancos que se encuentren en el escenario. Para ello, el método consiste en separar los blancos, mediante un filtro paso bajo, del clutter, interferencias, ruido y blancos estáticos. Esta técnica tiene menos coste computacional que el procesado Doppler o que las
técnicas tiempo-frecuencia. Además no se necesita trabajar con matrices sino con un único vector disminuyendo la complejidad del sistema. También permite separar los blancos de pequeño tamaño en movimiento de los picos de clutter o interferencia y mejora la ganancia obtenida con la integración de varias rampas cuando el blanco está en movimiento consiguiendo una ganancia superior a 6 dB en estos casos que las otras técnicas. En el caso de blancos estáticos se obtiene una ganancia de detección de 2 dB frente a técnicas SO- CFAR.
Sumario de la invención
La presente invención hace referencia a un método de detección de blancos, por velocidad, mediante radares de alta resolución que comprende las siguientes etapas:
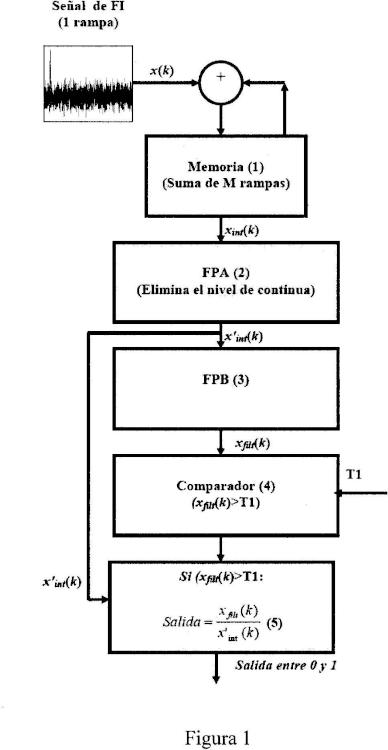
(i) se almacena la señal de salida del radar en una memoria (figura 1, 1) con la duración de una rampa y se suma a la siguiente, hasta llegar a sumar M rampas,
(ii) pasar por un filtro paso alto la señal integrada para eliminar el nivel de continua y otras componentes de muy baja frecuencia que la acompañan,
(iii) pasar la señal, obtenida en la etapa anterior, por un filtro paso bajo, de frecuencia de corte normalizada fc
(iv) pasar la salida del filtro de la etapa anterior por un comparador que compara la señal con un umbral (TI) cuyo valor será el eficaz de la señal en ausencia de blanco,
(v) dividir la señal detectada como posible blanco (xfilt(k)) por la de entrada (xint(k)) atendiendo a la siguiente fórmula:
xñi,(k)
Salida = fi
*'i« (*)
También es característico de la invención el que el filtro paso bajo puede ser sustituido por un filtro paso banda.
Descripción de las figuras
La figura 1 muestra un diagrama de flujo con las distintas etapas del método.
La figura 2 muestra la salida del detector para blancos simulados con ruido Gaussiano.
La figura 3 muestra la salida del detector multiplicando por un factor en función de la amplitud entrada de los blancos.
La figura 4 muestra la salida del detector en función de la velocidad.
La figura 5 muestra las curvas Pd para un blanco puntual con clutter (log-normal). Comparación de diferentes técnicas de detección.
La figura 6 muestra una comparativa de las curvas Pd para un ferry con ruido e integración para diferentes técnicas de detección.
La figura 7 muestra una comparativa de las curvas Pd para un ferry con clutter e integración para diferentes técnicas de detección.
La figura 8 muestra una comparativa de las curvas Pd para un ferry con ruido Gaussiano para diferentes técnicas de detección.
La figura 9 muestra una comparativa de las curvas Pd para un bote quieto con ruido e integración para diferentes técnicas de detección.
La figura 10 muestra una comparativa de las curvas Pd para un bote con ruido Gaussiano para diferentes técnicas de detección.
La figura 11 muestra la señal de entrada al detector, Xit{k), en la que aparecen diferentes tipos de blancos.
La figura 12 muestra la señal a la salida del detector.
La figura 13 muestra la matriz distancia-tiempo del velero y perfil en distancia tras la integración de 80 rampas.
Descripción detallada de una realización preferida de la invención
Aunque la invención se describe en términos de una realización específica preferida, será fácilmente evidente para los expertos en...
Reivindicaciones:
1Método de detección de blancos, por velocidad, mediante radares de alta resolución que comprende las siguientes etapas:
(i) se almacena la señal de salida del radar en una memoria (figural, 1) con la duración de una
rampa y se suma a la siguiente, hasta llegar a sumar M rampas,
(ii) pasar por un filtro paso alto la señal integrada para eliminar el nivel de continua y otras componentes de muy baja frecuencia que la acompañan,
(iii) pasar la señal, obtenida en la etapa anterior, por un filtro paso bajo, de frecuencia de corte 10 normalizada fc
(iv) pasar la salida del filtro de la etapa anterior por un comparador que compara la señal con un umbral (TI) cuyo valor será el eficaz de la señal en ausencia de blanco,
(v) dividir la señal detectada como posible blanco (xf¡it(k)) por la de entrada (xmt(k)) atendiendo a la siguiente fórmula:
x fí (k)
Salida ~ -----
*'in,(*)
(vi) Se determina que hay un blanco en movimiento cuando el valor Salida esté próximo a 1 y se determina que no hay blanco cuando esté próximo a 0.
2.- Método de detección de blancos, por velocidad, mediante radares de alta resolución, según
reivindicación 1, caracterizado porque el filtro paso bajo se sustituye por un filtro paso banda.
Patentes similares o relacionadas:
ESPUELA RETRACTIL, del 17 de Octubre de 2019, de UNIVERSIDAD TECNOLÓGICA DE PANAMÁ: Una espuela retráctil que incluye un cuerpo con un alojamiento interior ; una punta retráctil acoplada con el cuerpo mediante un mecanismo de […]
Un método para detectar una distancia, un sistema de radar y un producto de programa informático, del 10 de Mayo de 2017, de NEDERLANDSE ORGANISATIE VOOR TOEGEPAST-NATUURWETENSCHAPPELIJK ONDERZOEK TNO: Un método para detectar una distancia (h) entre un sistema de radar en movimiento y una superficie reflectante , que comprende las etapas […]
Procedimiento para la detección de la trayectoria de vuelo de proyectiles, del 1 de Abril de 2015, de Airbus Defence and Space GmbH: Procedimiento para la detección de la trayectoria de vuelo de proyectiles, en el que por medio de un radar Doppler a lo largo de la trayectoria de vuelo […]
 Detección de pico y reducción de ecos parásitos para un sensor de microondas, del 21 de Enero de 2013, de RADATEC, INC: Un procedimiento para llevar a cabo una medición de palas para palas rotatorias dentro de una carcasa de un motor de turbina que comprende las etapas de:
transmitir […]
Detección de pico y reducción de ecos parásitos para un sensor de microondas, del 21 de Enero de 2013, de RADATEC, INC: Un procedimiento para llevar a cabo una medición de palas para palas rotatorias dentro de una carcasa de un motor de turbina que comprende las etapas de:
transmitir […]
"SEMAFORO DE CONTACTO PARA SEÑALIZAR SIMPATIAS"., del 16 de Febrero de 1983, de HANS-JURGEN THIELEN: SEÑALIZADOR LUMINOSO. COMPRENDE UN DISPOSITIVO INDICADOR OPTICO, DOTADO DE SUPERFICIES DE COLORES DIFERENTES, UN DISPOSITIVO DE MANIOBRA PARA ACCIONAR […]
 METODO DE DETECCION DEL MOVIMIENTO ALREDEDOR DE PUERTAS AUTOMATICAS, del 16 de Junio de 2010, de BEA S.A.: Método para detectar movimientos en torno a puertas automáticas usando un sensor de radar Doppler, que comprende los siguientes pasos: generación […]
METODO DE DETECCION DEL MOVIMIENTO ALREDEDOR DE PUERTAS AUTOMATICAS, del 16 de Junio de 2010, de BEA S.A.: Método para detectar movimientos en torno a puertas automáticas usando un sensor de radar Doppler, que comprende los siguientes pasos: generación […]
 PROCEDIMIENTO PARA ESTABLECER EL ESFUERZO SUFRIDO POR ALABES DE UNA TURBINA DURANTE EL FUNCIONAMIENTO, ASI COMO DISPOSITIVO CORRESPONDIENTE PARA LLEVAR A CABO EL PROCEDIMIENTO, del 1 de Noviembre de 2007, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para establecer los esfuerzo sufridos por álabes de paleta dispuestos en una turbina con un eje de rotor montado giratoriamente en […]
PROCEDIMIENTO PARA ESTABLECER EL ESFUERZO SUFRIDO POR ALABES DE UNA TURBINA DURANTE EL FUNCIONAMIENTO, ASI COMO DISPOSITIVO CORRESPONDIENTE PARA LLEVAR A CABO EL PROCEDIMIENTO, del 1 de Noviembre de 2007, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para establecer los esfuerzo sufridos por álabes de paleta dispuestos en una turbina con un eje de rotor montado giratoriamente en […]