MÉTODO DE DECODIFICACIÓN ESFÉRICA DE SEÑALES DE SISTEMAS DE COMUNICACIÓN DE MÚLTIPLES ENTRADAS Y MÚLTIPLES SALIDAS (MIMO) DE MÁXIMA VEROSIMILITUD.
Método de decodificación esférica de señales de sistemas de comunicación de múltiples entradas y múltiples salidas (MIMO) de máxima verosimilitud.
En el que se aplica un método de cotas por minimización en caja que acelera la decodificación esférica y que comprende una etapa de preproceso y una etapa de búsqueda. Proporciona un nuevo test de factibilidad incluido en la etapa de búsqueda, en el que se obtienen señales scri que cuando no están en la caja obtiene la señal scki, lo que reduce y simplifica el número de minimizaciones, reduciendo el tiempo de computación y por tanto el coste temporal de la decodificación.
Además usa estas señales scri y/o scki para seleccionar una señal inicial x0 que se aplica en el método de minimización en caja, lo que también minimiza el coste temporal de las minimizaciones en caja.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230387.
Solicitante: UNIVERSIDAD POLITECNICA DE VALENCIA.
Nacionalidad solicitante: España.
Inventor/es: GARCÍA MOLLÁ,Victor Manuel, VIDAL MACIÁ,Antonio Manuel, GONZÁLEZ SALVADOR,Alberto, ROGER VAREA,Sandra.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04W8/00 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04W REDES DE COMUNICACION INALAMBRICAS (difusión H04H; sistemas de comunicación que utilizan enlaces inalámbricos para comunicación no selectiva, p. ej. extensiones inalámbricas H04M 1/72). › Gestión de datos de red.
Fragmento de la descripción:
OBJETO DE LA INVENCiÓN
La presente invención se refiere a un método de decodificación esférica de señales de sistemas de comunicación de múltiples entradas y múltiples salidas (MIMO) de máxima verosimilitud, en el que se aplica un método de cotas por minimización en caja que acelera la decodificación esférica; y que tiene por objeto reducir el número de minimizaciones en caja y simplificar cada una de dichas minimizaciones, reduciendo el tiempo de computación y por tanto el coste temporal de la decodificación.
En general la invención es aplicable en la industria de las telecomunicaciones y más particularmente en comunicaciones inalámbricas. Además la invención es aplicable en el campo de la criptografia.
ANTECEDENTES DE LA INVENCiÓN
En la última década, uno de los desarrollos tecnológicos más significativos que condujeron a la nueva generación de banda ancha inalámbrica es la comunicación a través de sistemas de múltiples entradas y múltiples salidas (multiple-input multiple-output, MIMO) . El reciente interés despertado por las tecnologias 20 MIMO no se limita solo al mundo de la investigación sino que también ha impactado sobre la industria de las comunicaciones inalámbricas de manera espectacular, prueba de ello es la adopción de las técnicas MIMO en muchos estándares inalámbricos tales como L TE, WiMAX y WLAN. Los sistemas MIMO aumentan las tasas máximas de transmisión y mejoran la fiabilidad y cobertura de las comunicaciones inalámbricas actuales sin la necesidad de utilizar un de ancho de banda ni potencia de transmisión adicional. Esta es sin 25 duda una enorme ventaja, dado que los recursos espectrales son muy escasos y caros. Por otra parte, mantener la potencia de transmisión lo más baja posible es un factor crucial en la vida útil de la bateria de los dispositivos de comunicación inalámbrica y por ello hay que intentar minimizar el consumo de las etapas que hacen posible la comunicación MIMO. En definitiva, por todas las razones anteriormente descritas y por muchas otras, MIMO es un campo que atrae una gran parte de la investigación internacional de más alto nive l.
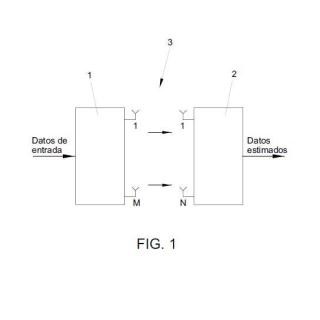
La Figura 1 muestra el diagrama de bloques de un sistema de comunicaciones MIMO típico compuesto por un transm isor 1 equipada con M antenas para envio de señales a un receptor 2 equipado con N antenas, a través de un canal MIMO 3 que genera una mezcla de las señales transmitidas, la cual es debida a la aparición de múltiples caminos entre cada par de antenas transmisora-receptora. El número de antenas 35 emisoras nunca es mayor al de antenas receptoras, es decir N 2:: M. El receptor comprellde un delectar que procesa la mezcla de señales recibidas y estima cuales fueron los datos transmitidos, generalmente siguiendo alguna regla probabilística, obteniendo la señal decodificada. Se ha demostrado que el uso de sistemas de comunicación MIMO complica el receptor y, especialmente, la etapa de detección de datos. Por lo tanto, es muy importante conseguir receptores MIMO de baja complejidad que mantengan una baja tasa de error en la detección.
Existen diferentes tipos de detectores, con diferentes propiedades de tasa de error y de complejidad de cálculo. Los conocidos como detectores "subóptimos' son computacional mente eficientes, pero su tasa de error puede no ser aceptable, sobre todo en presencia de mucho ruido en la transmisión.
Los detectores con menor tasa de error son los llamados detectores óptimos o de máxima verosimilitud, que 45 en la decodificación obtienen la señal con mayor probabi lidad de ser la enviada. Los detectores de máxima verosimilitud más conocidos son los basados en decodificación esférica, que se describe más adelante para facilitar la comprensión de la invención.
Los detectores de máxima verosimilitud en general, y los de decodificación esférica en particular, son, muy costosos computacional mente, es decir el tiempo de computación que requieren es elevado, especialmente 50 cuando el ruido en el canal de comunicaciones es considerable. Además, el coste de detección de una señal por estos métodos es bastante impredecible, dependiendo del ruido del canal. La invención que se describe más adelante es una modificación del método de decodificación esférica orientada a reducir el coste de cálculo de la decodificación, y que tiene como efecto adicional que la complejidad de detección de una señal sea prácticamente independiente del ruido.
DESCRIPCiÓN DE LA INVENCiÓN
Para conseguir los objetivos y resolver los inconvenientes anteriormente señalados, la invención proporciona un nuevo método de decodificación esférica de señales de sistemas de comunicación de múltiples entradas y
múltiples salidas (MIMO) de máxima verosimilitud, en el que se tiene un transmisor con una pluralidad de antenas emisoras M para envio de señales por un canal MIMO a una pluralidad de antenas N de un receptor de decodificación esférica en el que se aplica un método de cotas por minimización continua que acelera la decodificación esférica; y donde es conocido que los datos de entrada del receptor son:
-una matriz de canal HE RN"M, con N filas y M columnas, es decir el número de filas es igual al número antenas receptoras y el número de columnas es igual al número de antenas emisoras, donde el número de antenas receptoras es mayor que el número de antenas emisoras N ~ M.
-la constelación: D = (d1 • .. , dL } conjunto de L simbolos, todos ellos en IR.
- la señal recibida y? IRN ;
A partir de dichos datos de entrada, el receptor obtiene la señal de máxima verosimilitud, es decir la señal decodificada, que es seleccionada de entre todas las señales de M componentes que cumplen que cada uno de los M componentes de la señal que pertenece a la constelación D. Por la señal de máxima verosimilitud se entiende aquella de estas señales de M componentes que, tras ser filtrada por la matriz de canal H, tiene la distancia minima a la señal recibida y.
El método de decodificación esférica convencional comprende una etapa de preproceso y una etapa de búsqueda.
En la etapa de preproceso se obtiene una nueva matriz de canal R E IR"'''''' Y además se obtiene una nueva señal recibida z E IR"', mediante transfonnación ortogonal de la matriz de canal H y la señal recibida y; donde 20 la nueva matriz de canal R es triangular superior mediante la que se simplifica la etapa de búsqueda al pennite organizar la búsqueda de forma secuencial.
Además en la etapa de preproceso se obtiene una primera señal auxiliar sck. mediante la resolución de un sistema de ecuaciones triangulares convencional que se describe más adelante para facilitar la comprensión de la invención. Seguidamente se verifica si se cumple la condición de que dicha primera señal auxiliar sck 25 tenga todas sus componentes dentro de una caja definida por los valores máximo y mínimo de la constelación D, de forma que en caso de comprobarse que se cumple dicha condición, entonces se obtiene un radio inicial cuyo valor es la distancia entre la señal sck tras ser cuantizada y filtrada por la matriz R, y la señal recibida z. Por el contrario, en caso de no comprobarse dicha condición, entonces en la etapa de preproceso se selecciona una señal inicial xO que se utiliza para calcular una segunda señal auxiliar ser
mediante resolución de un problema de minimización con restricciones convencional, y además se obtiene un radio inicial como la distancia entre la señal ser tras ser cuantizada y filtrada por la matriz R, y la señal recibida z.
En la etapa de búsqueda es conocido que en primera instancia se establece el cuadrado de un radio inicial como la menor distancia total obtenida hasta el momento, y seguidamente se enumeran unas señales 35 parciales (S;.S;+I.··· , SM_I ' SM) y unas señales completas (SI, S2, ··· . SM_I, SM) . sobre las que se aplica un test de factibilidad, para decidir si cada una de las señales parciales enumeradas es factible o no, y cuando una cierta señal parcial (S;, S;+I, ···. SM_I' sM) es factible, se siguen enumerando las siguientes señales, seleccionadas entre señales parciales y señales completas, denominadas sucesoras, de dicha señal parcial, y cuando una cierta señal parcial (s;, S;+I'···' SM_1' SM) no es factible se descarta y no se enumera ninguna señal parcial ni señal completa, sucesora de dicha señal parcial.
Cada vez que en la enumeración se obtiene una señal completa que, tras ser filtrada por la matriz de canal R, su distancia a la señal recibida z es menor que la menor distancia total obtenida hasta el momento, dicha señal completa se guarda como candidata a solución de máxima verosimilitud, y la menor distancia...
Reivindicaciones:
1. M~TODO DE DECODIFICACiÓN ESFERICA DE SEÑALES DE SISTEMAS DE COMUNICACiÓN DE MÚlTIPLES ENTRADAS Y MÚLTIPLES SALIDAS (MIMO) DE MÁXIMA VEROSIMILITUD. donde se tiene un transmisor con una pluralidad de M antenas emisoras para envío de sai'lalas por un canal MIMO a una pluralidad de N antenas de un receptor que utitiza decodificación esférica que se acelera mediante la aplicación de un método de cotas por minimización continua; y donde los datos de entrada del receptor son:
-una matriz de canal 11 E ¡¡¡, , "XM, con N filas y M columnas. donde N ;:?: M.
-la constelación: D = (di' .... dd conjunto de L slmbolos, todos ellos en R.
-la ser'lal recibida yE ¡¡¡, ..;
Calculándose. a partir de dichos datos, la senal de máxima verosimilitud correspondiente a la ser'lal decodificada. que es seleccionada de entre todas las seMles de M componentes que cumplen que cada uno de los M componentes de la senal pertenece a la c:onstelación D; entendiéndose pOI' la ser'lal de máxima verosimilitud aquella de estas ser'lates que, Iras ser filtrada por la matriz de canal H. tiene distancia mínima a la senal recibida y:
comprendiendo el método:
• una etapa de preproceso (d21) de obtención de una nueva matriz de canal R E ¡¡¡"'-M Yde una nueva señal recibida Z E RIo!. mediante transformación ortogonal de la matriz de canal JI y la senal recibida y; donde la nueva matriz de canal R es lriangular superior; comprendiendo además la etapa de preproceso:
• Obtener una primera senal auxiliar 5eh . resolviendo un sistema de ecuaciones triangulares convencional (PA1) y
• verificar si dicha primera senal auxiliar sek ¡iene todas sus componentes dentro de una caja definida por los valores máximo y minimo de la constelación D. que
en caso de cumplirse dicha verificación comprende obtener un radio inicial como la distancia entre la se~al sek tras ser cuanlizada y filtrada por la matriz R, y la ser'lal recibida z; y en caso de no cumplirse dicha verificación. comprende seleccionar una señal inicial xO y utiliZllrla para calcular una segunda s.ar'lal auxiliar ser mediante resolución de un problema de minimización con restricciones convencional (PA2) , y además obtener un radio inicial como la distancia entre la señal ser tras ser Cuanllzada y filtrada por la matriz R. y la sellal recibida z.
-una etapa de búsqueda (d12) que comprende:
• establecer el cuadrado de un radio inicial como la menor distancia tolal oblenida hasta el momento. y
• enumerar unas senales parciales (S{.~i+l' "', liM_ I, SAl) Yunas setlales completas (SI, S2' " •. S.\f_ I' sM, sobre las que • se aplica un test de factibilidad (d28) . para decidir si cada una de las sanalas parciales enumeradAS AS factible ó no. y cuando una cierta setlal parcial U¡.S¡+I. ···, S"'_ I, s/of) es factible, se siguen enumerando las siguientes seriales, seleccionadas entre senales parciales y senales completas. denominadas sucesoras, de dicha se~al parcial. y cuando una cierta señal parcial (Si, Si.I.···. i "'_I' SM) no es factible se descarta y no se enumera ninguna sellal parcial ni senal completa. sucesora de dicha se~al parcial;
• cada vez que en la enumeración se obtiene una senal completa de forma que, tras ser filtrada por la matriz de canal R, su distancia a la señal recibida z es menor que la menor distancia total obtenida hasta el momento. dicha señal completa se guarda como candidata a solución de maxlma verosimilitud. y la menor distancia total obtenida hasta el momento pasa a ser dicha distancia a la sel\al recibida z; y
• Cuando acaba la enumeración, la sel'lal candidata resultante es la señal de máxima verosimilitud correspondiente a la serial decodificada, y
Comprendiendo dicho test de factibilidad (d21~) , donde se decide si una señal parcial {S¡, 5¡+I" " , sN-}. sNes factible o no, comprobar en prirner lugar Si su distancia parcial es menor que la menor distancia total obtenida hasta el momento; y
• en caso de no realizarse dicha comprobación. dicha sei'lal parcial se establece como no factible; y
• en caso de realizarse dicha comprobación. comprende seleccionar una señal inicial xO y utilizarla como sei'lal Inicial para aplicar un método de minimización con restricciones convencional, mediante el que se obtiene la segunda señal auxiliar ser; asociada a la señal parcial (5;.5 (-11 .. ·· , 5"'_1, SIo/) : Y usamlo dicha segunda senal auxiliar ser¡ se calcula una cota de minimización continua e convencional; sumándose la cota e a la distancia parCial de la
señal parcial (Si, S, +\, .. · . 510/_1' 5/01) ya continuación se verifica si dicha suma es mayor que la menor distancia total obtenida hasta el momento (ec. 15) , en cuyo caso la señal parcial se declara no factible; y si la suma es mE~nor que la menor distancia obtenida hasta el momento, la señal parcial se declara factible;
caracterizado por que:
-tras aplicar el test de factibilidad y verificar que una señal parcial (SI. 3'H-l ... · • 5M_ 1, 5M) es factible. al ser su distancia parcial menor que la menor distancia total obtenida hasta el momento, comprende:
-calcular la primera señal auxiliar sek¡= (SI'S~, .. ·, Si-' I) asociada a la señal parcial (5 (, 51+1 ... · . 5.\ (_1. 510/ ) ,
-verincar Si la primera sei'lal auxiliar sek¡ asociada a la sei'lal parcial (S ;, Si+], ..·• SIo/_I' Slol) tiene todas sus componentes dentro de la caja definida por los valor·es máximo y mínimo de la cOnstelación .
-cuando se comprueba dicha verificación la señal parcial (s;, Si+l .... , 5.\.1_1' SIo/) se declara factible;
-cuando no se comprueba dicha verificación, comprende calcular la segunda señal auxiliar seri asociada a la sei'lal parcial (51, 5H-I'''', 5, 1.1_1, 5101) . ya continuación calcular la cota de minimización continua e y decidir, mediante el test de factibilidad, si la señal parcial (Si. SI+I'''' , SIo/ _I. S/-I) es factible o no.
2. MÉTODO DE DECODIFICACiÓN ESFÉRICA DE SEÑALES DE SISTEMAS DE COMUNICACiÓN DE MÚLTIPLES ENTRAOAS y MÚLTIPLES SAlID, l\S (MIMO) DE MÁXIMA VEROSIMILITUD, segun reivindicación 1, se caracteriza por que:
-tras comprobar la factibilidad de una señal parcial (S¡, Si .. I, "· , SIoI_I, s, ., ) para una componente i-ésima, con i < M, que verifique que su distancia parcial sea rnenor que la menor distancia tota l obtenida hasta el momento, y para la que la primera sef'lal auxiliar sek, asociada a dicha señal parcial tiene alguna de sus componentes fuera de la caja definida por los valores. máximo y minimo de la constelación. por lo que se ha de calcular la segunda sei'lal auxiliar ser¡ asociada a la señal parcial (S1, S¡+I'''', S/-I-I> s, ., ) , Y se ha de calcular la cota de minimización continua e,
además comprende:
-obtener la señal inicial xO para el método de minimización continua con restricciones, como las i -1 primeras componentes de la segunda señal au:dliar ser;... 1: (SI ' S2, .. ·• sl_d cuando al comprobar la factibilidad de una ser'lal parcial predecesora (S'+I'''' , 5/01 -1' 5.., ) de una señ.al parcial (SI, " ' .
5. 1 _1, 5", ) se calculó la segunda señal auxiliar SCri+l = ($"1' $"2, "', sil asociada a la señal parcial (S, +1 , ... , 51>1_1, 5101 ) , Y
-obtener la señal inicial xO para el método de minimización continua con restricciones, como las i-1 primeras componentes de la primera senal aux.iliar sehi + l : (SI, S2"" , S¡ _ I) , cuando al comprobar la factibilidad de la sei'lal parcial predecesora (Si+l''' ' , SIoI _\' SI>!) no se calculó la segunda sei'lal auxiliar ser¡+, . Y por tanto se calculó la primera señal auxiliar sck, ~ I= (SI.SZ' .. ·. SI) asociada a la señal parcial
(S¡+I, "' , 5/01_1' 5/01) '
3. METODO DE DECODIFICACIÓN ESFÉRICA DE SEÑALES OE SISTEMAS DE COMUNICACiÓN DE MÚLTIPLES ENTRAOAS y MÚLTIPLES SAliDtlS (MIMO) DE MAxlMA VEROSIMILITUD, según reivindicaciones 1 o 2, caracterizado por que:
-la etapa de preproceso comprende almacenar la primera señal auxiliar seh , y almacenar la segunda señal auxiliar ser cuando haya sido calculada,
-emplear la primera señal auxiliar sek y la segunda sMal auxiliar ser en las posibles minimizaciones que se apliquen para comprobar la factibilidad de señales p, arclales de la forma (s..¡) con i = M .
-tras comprobar la factibilidad de una señal parcial (SI>1) con i "" M, que veriFique que su distancia parCial sea
menor que la menor distancia total obtenida hasta e, 1 momento, y para la que la primera señal auxiliar sek/ol asociada a dicha sef'lal parcial tiene alguna de sus componentes fuera de la caja definida por los valores máximo y mlnimo de la constelación, por lo que se ha de calcular la segunda senal auxiliar serA-! asociada a la señal parcial (SA-!) y la cota de minimización continua e, :
; además comprende:
- obtener la señal inicial xO para el método de minimización continua con restricciones, como las M -1 primeras componentes de ser, cuando en la etapa de preproceso se calculÓ ta senal auxiliar ser, y
-obtener la señal inicial xO para el método de minimización continua con restricciones, como las M -1 primeras componentes de sek, cuando en la etapa de preproceso no se calculó la segunda señal auxiliar ser y únicamente se calculó la primera señal auxiliar sek.
Patentes similares o relacionadas:
Comunicación de dispositivo a dispositivo, del 8 de Julio de 2020, de Nokia Solutions and Networks Oy: Un método, que comprende: seleccionar, por un primer nodo capaz de entrar en una red de comunicación de dispositivo a dispositivo, un canal para radiodifundir […]
Métodos y aparato para una transmisión de señal de descubrimiento entre una pluralidad de dispositivos, del 8 de Julio de 2020, de Nokia Solutions and Networks Oy: Un método que comprende: coordinar entre dispositivos que operan en un entorno de HetNet, información común indicativa de una o más agrupaciones de recursos para la […]
Procedimiento y sistema para la autenticación del emparejamiento entre un vehículo y un dispositivo móvil, del 24 de Junio de 2020, de KWANG YANG MOTOR CO., LTD.: Un procedimiento para la autenticación del emparejamiento entre una motocicleta y un dispositivo móvil , donde la motocicleta incluye un […]
Procedimientos para el intercambio de capacidad de conexión, del 17 de Junio de 2020, de QUALCOMM INCORPORATED: Un procedimiento de comunicación en una red de comunicación inalámbrica, que comprende: transmitir, mediante un primer dispositivo inalámbrico […]
Procedimiento y aparato para gestionar un perfil de grupo en un sistema de comunicación directa por Wi-Fi, del 6 de Mayo de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de generación de un grupo de un dispositivo electrónico en un sistema de comunicación directa por Wi-Fi, el procedimiento […]
Canales de descubrimiento y sincronización para zonas de rastreo de usuarios en una red celular, del 15 de Abril de 2020, de QUALCOMM INCORPORATED: Un procedimiento de comunicación inalámbrica, que comprende: generar una secuencia de referencia; ensamblar una carga útil que incluye un formato […]
Método para escanear recursos para comunicación directa de dispositivo a dispositivo en un sistema de comunicación inalámbrica y aparato para el mismo, del 15 de Abril de 2020, de LG ELECTRONICS INC.: Un método para transmitir una señal usando comunicación de dispositivo a dispositivo, D2D, por un equipo de usuario, UE, de transmisión en un sistema de comunicación […]
Sistemas y métodos para detección automática de dispositivo, gestión de dispositivo y asistencia remota, del 15 de Abril de 2020, de Bitdefender IPR Management Ltd: Un regulador [18] de red conectado a múltiples sistemas cliente [12a-f] en una red [14] local, en donde un enrutador [19] provee un servicio de red que comprende asignar direcciones […]