METODO DE CONTROL DIRECCIONAL PARA DISPOSITIVO LIMPIADOR DE PISCINAS.
Método de limpieza del fondo (51) de una piscina o depósito que comprende:
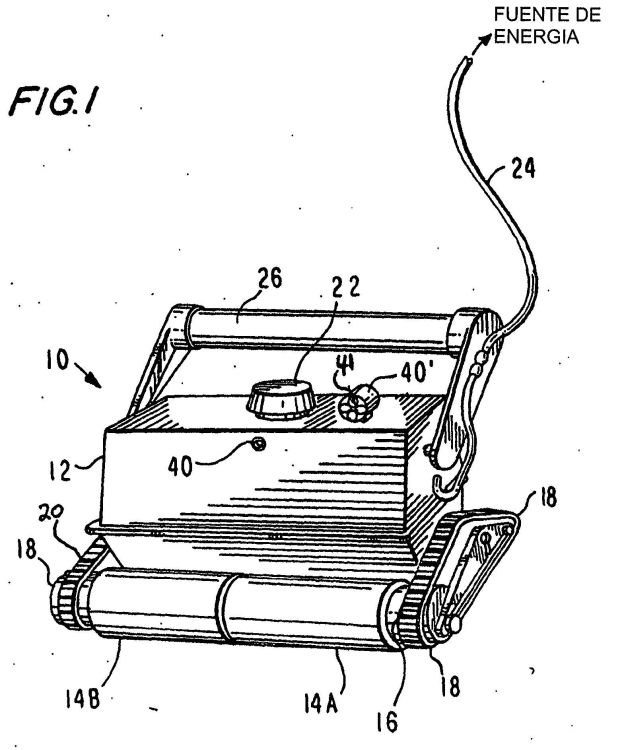
(a) proporcionar un dispositivo de limpieza de piscinas robótico (10) que avance en la dirección de su eje longitudinal y que comprende un par de medios de tracción separados (14A, 14B) dispuestos en cada lado de su eje longitudinal y en cada extremo del dispositivo del limpieza (10), en el que los medios de tracción (14A, 14B) son seleccionados del grupo que consiste en: cepillos con forma de rodillos, cintas o ruedas de tracción sin fin, estando montado cada par de medios de tracción (14A, 14B) en cada lado del dispositivo de limpieza (10) permitiendo su rotación independiente, un motor de tracción separado (30A, 30B) conectado operativamente a cada par de medios de tracción (14A, 14B), un dispositivo de control programable (34), y uno o más sensores de pared generadores de señal (40; 40'') conectados a dicho dispositivo de control (34), siendo accionados dichos medios de tracción (14A, 14B) en cada lado del dispositivo de limpieza (10) por uno de dichos motores de tracción separados (30A, 30B), siendo dirigida la velocidad y/o dirección de rotación de cada uno de dichos motores separados (30A, 30B) por el dispositivo de control programable (34), siendo dicho controlador (34) sensible a las señales del sensor recibidas de uno o más sensores de pared (40, 40''); (b) activar el dispositivo de control (34) para poner en movimiento el dispositivo de limpieza (10) mediante la rotación de los medios de tracción (14A, 14B) a través del fondo (51) de una piscina o depósito, dirigiéndolo hacia una pared lateral (54, 54''); (c) interrumpir la rotación de los medios de tracción (14A, 14B) como respuesta a la señal del sensor de pared cuando dichos medios de tracción dispuestos en el extremo delantero o de avance del dispositivo de limpieza están próximos a una pared lateral (54, 54'') de la piscina o depósito; (d) invertir la dirección de rotación de dichos medios de tracción (14A, 14B) en un lado del dispositivo de limpieza (10) para producir de este modo un giro de 180º; (e) interrumpir la rotación de los medios de tracción (14A, 14B) cuando el extremo delantero del dispositivo de limpieza (10) en giro está próximo a la pared lateral (54, 54'') de la piscina o depósito; (f) activar los dos medios de tracción (14A, 14B) para desplazar el dispositivo de limpieza (10) alejándolo de la pared lateral (54, 54'') hacia otra pared lateral (54, 54''); y (g) repetir las etapas (c) a (f).
Tipo: Resumen de patente/invención.
Solicitante: AQUAPRODUCTS INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 25 RUTGERS AVENUE, CEDAR GROVE,NEW JERSEY 07009.
Inventor/es: PORAT, JOSEPH.
Fecha de Publicación: .
Fecha Solicitud PCT: 30 de Marzo de 2000.
Fecha Concesión Europea: 19 de Septiembre de 2007.
Clasificación PCT:
- E04H4/16 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04H EDIFICIOS O CONSTRUCCIONES SIMILARES PARA EMPLEOS PARTICULARES; PISCINAS PARA NADAR O PARA CHAPOTEAR; MASTILES; BARRERAS; TIENDAS O REFUGIOS PROVISIONALES, EN GENERAL (cimentaciones E02D). › E04H 4/00 Piscinas para nadar o para chapotear (generadores de olas en las bañeras A47K 3/10; separación de B01D; tratamiento del agua C02F; bombas que producen olas F04D 35/00). › especialmente adaptados para la limpieza de las piscinas para nadar o para chapotear (dispositivos de limpieza especiales para barcos B63B 59/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
Vehículo de limpieza de piscinas automatizado con elementos de depuración rotatorios y estacionarios, del 15 de Julio de 2020, de Upward Sales Limited: Vehículo de limpieza de piscinas (PCV) completamente sumergible y automatizado para desinfectar el agua de una piscina, donde el PCV comprende: una carcasa […]
Robot de limpieza de piscinas que tiene una unidad de filtrado y un sensor, del 24 de Junio de 2020, de MAYTRONICS LTD.: Un robot de limpieza de piscinas, que comprende: una unidad de filtrado para filtrar fluido que pasa a través de la unidad […]
Limpiador de piscinas con oruga rodante ajustable para controlar la velocidad del flujo de agua, del 10 de Junio de 2020, de Forever Vanture Technology Limited: Limpiador de piscinas que comprende: una carcasa con una entrada formada en una sección inferior de la misma; […]
Robot de limpieza de piscinas con empujes de chorro direccionales, del 10 de Junio de 2020, de MAYTRONICS LTD.: Un limpiador de piscinas que comprende: una carcasa ; un motor de accionamiento que está configurado para ayudar a mover el limpiador […]
Método y aparato para proporcionar señales eléctricas relacionadas con la orientación desde un limpiador robótico de piscinas que tiene un sensor de orientación a una fuente de alimentación remota a través de un cable de dos hilos, del 3 de Junio de 2020, de AQUA PRODUCTS INC.: Método para limpiar una superficie de una piscina con un limpiador robótico de piscinas que tiene un motor eléctrico para mover el limpiador (100, […]
Método para operar un robot de limpieza de piscinas interactivo, del 27 de Mayo de 2020, de MAYTRONICS LTD.: Un método para operar un robot de limpieza de piscinas, el método comprende: recibir, procedente de un usuario y mediante […]
Robot limpiador de piscinas, del 13 de Mayo de 2020, de MAYTRONICS LTD.: Un robot limpiador que comprende: un alojamiento que comprende una entrada de fluido, una salida de fluido, un borde trasero y un borde […]
Dispositivo de lavado para recibir una solución de lavado de una tubería y procedimiento de lavado de la tubería, del 29 de Abril de 2020, de A.P.F. Aqua System AG: Dispositivo de lavado para recibir una solución de lavado de una tubería, en el que el dispositivo de lavado presenta: un elemento base […]