METODO PARA CONTROLAR LOS MOVIMIENTOS DE UN SIMULADOR DE VUELO Y SIMULADOR DE VUELO QUE PONE EN PRACTICA DICHO METODO.
Un método para controlar los movimientos de un simulador de vuelo,
que implica aceleraciones lineales y angulares percibidas por un piloto sentado en el asiento para el piloto,
con lo que la velocidad de alabeo (p) y la velocidad de guiñada (r), así como una fuerza específica en una dirección lateral (Ay), calculadas de acuerdo con un modelo de un avión simulado en un punto fijo del avión simulado, son convertidas por un programa de movimiento en una posición lateral (y) y un ángulo de alabeo (f) del simulador, caracterizado porque el método comprende cualquiera de los pasos de: calcular el ángulo de alabeo (f) del simulador debido al ángulo de alabeo del avión simulado, corrigiendo para ello un valor calculado originalmente (fhp) del ángulo de alabeo (f) por un factor de corrección (fcor) proporcional a una fuerza específica lateral, inducida por un filtro de eliminación usado durante el cálculo de alineación de la gravedad terrestre de la posición lateral (y) del simulador,
y/o
- descomponer la fuerza específica en la dirección lateral (Aypilot) que actúa en el punto de referencia del piloto en el avión simulado, en una primera componente y una segunda componente, la primera componente relativa a la fuerza específica (Ay) en un punto fijo del avión simulado, y la segunda componente que tiene un primer término relacionado con la aceleración debida a las aceleraciones angulares de guiñada (r) y un segundo término relacionado con las aceleraciones angulares de alabeo (p), de acuerdo con la fórmula
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/009841.
Solicitante: VANBIERVLIET, FILIP.
Nacionalidad solicitante: Bélgica.
Dirección: RUE DES COMBATTANTS, 101,1310 LA HULPE.
Inventor/es: VANBIERVLIET,FILIP.
Fecha de Publicación: .
Fecha Concesión Europea: 24 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G05B19/408C
- G09B9/12 FISICA. › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › G09B 9/00 Simuladores para la enseñanza o el entrenamiento. › Sistemas de desplazamiento para simuladores de aeronave.
Clasificación PCT:
- G05B19/408 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por la manipulación de datos o el formato de los datos p. ej. lectura, introducción en una memoria intermedia o conversión de datos.

Fragmento de la descripción:
Método para controlar los movimientos de un simulador de vuelo y simulador de vuelo que pone en práctica dicho método.
Campo técnico del invento
El presente invento se refiere a simuladores de vuelo y a métodos para controlar los simuladores de vuelo.
Antecedentes del invento
Los sistemas de movimiento de los simuladores de vuelo, o dicho brevemente los simuladores de vuelo, están provistos de sistemas de movimiento de 6 grados de libertad. Los simuladores de vuelo proporcionan indicación fiel del movimiento de las maniobras a través del filtrado de las aceleraciones angulares y de fuerzas específicas (lineales). Estas señales son importantes para la percepción del piloto, y por lo tanto el movimiento de los simuladores de vuelo deberá ser puesto de acuerdo con los movimientos de un avión real. Los algoritmos que se exponen en lo que sigue se han empleado en la técnica anterior para controlar los simuladores de vuelo.
Transformación del centroide (centro de gravedad geométrico)
Como la intención es la de simular el movimiento, tal como es percibido por el piloto, el simulador de vuelo está situado hipotéticamente en el avión, en correspondencia con el punto P de referencia del piloto (Fig. 4).
La lógica que se sigue (Fig. 8) se encuentra siempre en la bibliografía (véanse Russell V. Parrish, James E. Dieudonne y Dennis J. Martin Jr. "Software del movimiento para una base de movimiento sinérgica de seis grados de libertad" p.9. NASA TN D-7350 diciembre 1973/M.Baarspul, Delft University of Technology. "La generación de indicaciones de movimiento en un sistema de movimiento de seis grados de libertad" p.5, Report LR-248, junio 1977/G.A.J. van de Moesdijk, F.L. Van Biervliet, Delft University of Technology. "investigación para mejorar el sowftware de movimiento del simulador de vuelo Fokker F-28", p.4, Report LR-358, septiembre 1982) y en aplicaciones prácticas.
Las fuerzas específicas se calculan en el avión en el lugar del centroide de la plataforma hipotética, de acuerdo con las fórmulas dadas en: O.H. Gerlach, Technische Hogesschool Delft, "Vliegeigenschappen 1* p. 227, Dictaat D 26, octubre-noviembre 1981/M. Baarsput, Delft University of Technology". "La generación de indicaciones de movimiento en un sistema de movimiento de seis grados de libertad" página 6, Report LR-248, junio 1977.
Por ejemplo, en la dirección y:

siendo Ay-centroid la componente y de la fuerza específica en el lugar hipotético del centroide del simulador con respecto al sistema de referencia del avión. Ay-cg la componente y de la fuerza específica del centro de gravedad del avión, p la velocidad de alabeo, q la velocidad de cabeceo, r la velocidad de guiñada,
El programa de movimiento hace uso de las tres componentes de la fuerza específica corregidas Ax-centroid, Ay-centroid, Az-centroid y las tres velocidades angulares (o aceleraciones) p, q, r, como entradas. Las 6 señales de salida del programa de movimiento mandan la posición del centroide (tres coordenadas) en la plataforma de movimiento, así como los 3 ángulos de Eluler.
Simulación de la aceleración angular de alabeo (Fig. 9)
La velocidad de alabeo multiplicada por una ganancia de ajuste descendente Kd es filtrada a través de un filtro de paso alto de alabeo (de 1º o de 2º orden). El camino de coordinación hace uso de la inclinación lateral con objeto de mantener la "alineación de la gravedad". Con objeto de mantener la posición lateral dentro de los límites del simulador, se envía la posición lateral a través de un filtro-y de alabeo, en general de 2º orden. La salida del programa es el ángulo
Estos filtros pueden ser de adaptación, lo que significa que Kd podría ser adaptada continuamente de acuerdo con un criterio de coste dado.
Simulación de la fuerza específica lateral (Fig. 10)
La fuerza específica lateral calculada en la posición hipotética del centroide se multiplica por una ganancia de ajuste descendente y se envía después a través de dos filtros diferentes: un filtro de posición de paso alto y un filtro angular de paso bajo. Estos filtros son en la mayoría de los casos de 2o orden y no son complementarios. Muy bien pueden ser de adaptación. De nuevo, la salida de los filtros es la "posición del centroide" y no la posición del piloto.
Los simuladores de vuelo de la técnica anterior, con al menos inclinación lateral y alabeo como un grado de libertad, se comportan invariablemente como sigue: considerando únicamente el viraje coordinado en vuelo por medio del mando de alerones, al principio de la maniobra, la percepción del piloto parece ser correcta. Se perciben la iniciación del alabeo así como la iniciación de la fuerza específica lateral. Pocos momentos después, sin embargo, se aprecia una fuerza lateral opuesta espuria. Se percibe como si el avión estuviese efectuando un resbalamiento lateral, lo que no es el caso.
También, durante las maniobras de rodaje en tierra, hay muy poca correlación entre la percepción del movimiento lateral y la información visual. Se tiene siempre la impresión de que se derrapa lateralmente en la pista.
Estos problemas se exponen con más detalle en lo que sigue.
Maniobra de alabeo
Consideremos una respuesta típica de movimiento del simulador de vuelo, en la Fig. 11, al paso de maniobra de mando de alerones de la Fig. 6.
Para los gráficos se usaron filtros de 2º orden, pues son los más frecuentemente usados. La única entrada a los filtros viene de la velocidad de alabeo. No hay entrada al filtro de fuerza específica lateral, ya que la posición-z del centroide (zc-ac) se desprecia en la mayoría de los casos.
La aceleración angular del alabeo (Fig. 11.4) muestra una inversión del signo que es inherente a la aceleración de alabeo filtrada por filtro de paso alto.
El tiempo de respuesta de la fuerza específica lateral en el punto P de referencia del piloto (Fig. 11.5) muestra las siguientes características:
1ª El valor del pico inicial es correcto. Esta aceleración es debida a ? *
2ª Este pico inicial va seguido instantes después por una fuerza lateral espuria opuesta importante. Esta fuerza espuria es perjudicial para la fidelidad del movimiento del simulador de vuelo. Puede verse en la bibliografía como "apoyo desfasado del alumno sobre los pedales" etc. (J.B. Sinacori, Northrop Corporation, "A practical approach to motion simulation" ("una aproximación práctica a la simulación de movimiento") página 13, A1AA comunicación 73-931, septiembre 1973/Susan A. Riedel y L.G.Hofmann, Systems Technology Inc., "Investigation of nonlinear motion simulator washout schemes" ("Investigación de esquemas de eliminación de movimientos no lineales del simulador"), página 524, página 530, Memorias de la 14ª Conferencia Anual sobre Control Manual, noviembre 1978/Susan A. Riedel y L.G. Hofmann, STI, "Validación de un simulador de vuelo con ingeniería tripulada" página 172, STI-TR-1110-1, AFFDL-TR-78-192-FT-1, Feb. 1979/David L. Quam, Universidad de Dayton, Ohio (EE.UU.), "Human pilot perception experiments" ("Experimentos de percepción de piloto humano") página 263, Memorias de la 15ª Conferencia Anual sobre Control Manual, noviembre 1979/Irving L. Ashkenas, STI, "Collected flight...
Reivindicaciones:
1. Un método para controlar los movimientos de un simulador de vuelo, que implica aceleraciones lineales y angulares percibidas por un piloto sentado en el asiento para el piloto,
con lo que la velocidad de alabeo (p) y la velocidad de guiñada (r), así como una fuerza específica en una dirección lateral (Ay), calculadas de acuerdo con un modelo de un avión simulado en un punto fijo del avión simulado, son convertidas por un programa de movimiento en una posición lateral (y) y un ángulo de alabeo (
y/o
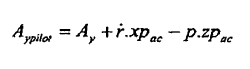
- descomponer la fuerza específica en la dirección lateral (Aypilot) que actúa en el punto de referencia del piloto en el avión simulado, en una primera componente y una segunda componente, la primera componente relativa a la fuerza específica (Ay) en un punto fijo del avión simulado, y la segunda componente que tiene un primer término relacionado con la aceleración debida a las aceleraciones angulares de guiñada (r) y un segundo término relacionado con las aceleraciones angulares de alabeo (p), de acuerdo con la fórmula
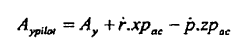
siendo xpac la coordenada x del punto (P) de referencia del piloto en un sistema de referencia que tiene el origen en el punto fijo del avión simulado y siendo zpac la coordenada z del punto de referencia del piloto en dicho sistema de referencia, siendo
- filtrar la primera componente (Ay) a través de dos filtros, un filtro de paso alto y un filtro de paso bajo,
- filtrar cada uno de los términos de la segunda componente mediante un juego de un primer y un segundo filtros complementarios en paralelo, siendo filtros complementarios los filtros cuya suma de funciones de transferencia es uno,
- usar la suma de la salida del filtro de paso alto y de la salida del primero de los filtros complementarios de cada juego para calcular la posición lateral (y) deseada del simulador, y usar la suma de la salida del filtro de paso bajo y de la salida del segundo de los filtros complementarios de cada juego para calcular el ángulo de alabeo (
2. Un método de acuerdo con la reivindicación 1, en el que el cálculo del ángulo de alabeo (
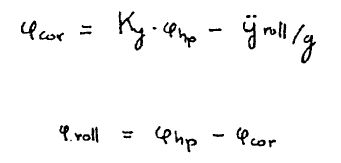
donde (
g es la constante gravitatoria terrestre,
Ky es un factor de coordinación lateral de la ganancia,
3. Un método de acuerdo con la reivindicación 2, en el que dicho factor Ky de coordinación lateral de la transformación matemática entre 0 y 1 se introduce, permitiendo reducir el recorrido lateral a expensas de alguna fuerza específica lateral espuria aceptable, modulando para ello entre un caso de "no coordinación", en el que Ky = 0, y un caso de "coordinación total" en el que Ky = 1.
4. Un método de acuerdo con la reivindicación 3, en el que Ky = 1, y el ángulo de alabeo (
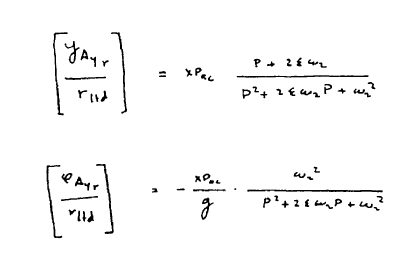
5. Un método de acuerdo con una cualquiera de las reivindicaciones 2 a 4, en el que la transformación matemática implica un filtro de paso alto del ángulo de alabeo (
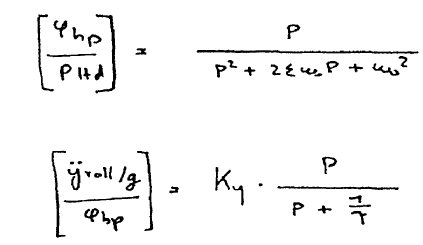
donde Pltd es la velocidad de alabeo de entrada limitada a través de un factor de ganancia de ajuste descendente Kd, y opcionalmente una función limitadora de la velocidad de alabeo, de tal modo que para un paso en el mando de los alerones, el recorrido lateral del simulador es de un valor finito, y donde P representa el operador de Laplace.
6. Un método de acuerdo con cualquiera de las reivindicaciones 2 a 4, en el que la transformación matemática implica un filtro de paso alto (
7. Un método de acuerdo con la reivindicación 1, en el que el segundo componente de la fuerza específica en la dirección lateral se obtiene por medio de cuatro filtros adicionales: un primer juego de dos filtros complementarios para la aceleración de alabeo y un segundo juego de dos filtros complementarios para la aceleración de guiñada, de modo que en cada juego de filtros complementarios, uno manda una excursión lateral del simulador y el otro manda un ángulo de alabeo del simulador, de acuerdo con las fórmulas de la función de transferencia
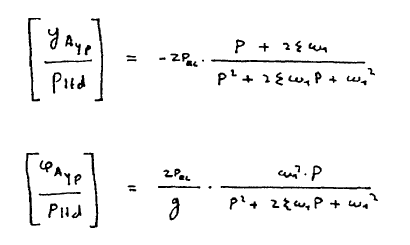
y
donde Pltd y rltd son, respectivamente, la velocidad de entrada de alabeo y de guiñada, limitadas por un factor de ganancia de ajuste descendente Kp y Kr respectivamente, y opcionalmente a través de una función limitadora de la velocidad, y P es el operador de Laplace.
8. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el que el punto fijo del avión simulado es el centro de gravedad de dicho avión simulado.
9. Un producto de programas de ordenador para ejecutar cualquiera de los métodos tales como los que aquí se han reivindicado en las reivindicaciones anteriores, cuando se ejecuta en un dispositivo de cálculo asociado con un simulador de vuelo que simula a un avión.
10. Un dispositivo de almacenamiento de datos legibles a máquina que lleva el producto de programa de ordenador según la reivindicación 9.
11. Un controlador adaptado para controlar los movimientos de un simulador de vuelo, que implica las aceleraciones lineales y angulares percibidas por un piloto sentado en el asiento para el piloto,
con lo que la velocidad de alabeo (p) y la velocidad de guiñada (r), así como una fuerza específica en una dirección lateral(Ay) calculadas de acuerdo con un modelo de un avión simulado en un punto fijo del avión simulado, son convertidas por un programa de movimiento en una posición lateral (y) y un ángulo de alabeo (
en que el controlador comprende cualquiera de:
una primera calculadora adaptada para calcular el ángulo de alabeo (
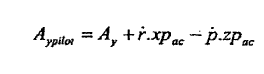
- una segunda calculadora adaptada para descomponer la fuerza específica en la dirección lateral (Aypilot) que actúa en el punto de referencia del piloto en el avión simulado, en una primera componente y una segunda componente, relativa la primera componente a la fuerza específica (Ay) en un punto fijo del avión simulado, y teniendo la segunda componente un primer término relacionado con las aceleraciones debidas a la guiñada (r) y un segundo término relacionado con las aceleraciones angulares de alabeo (p), de acuerdo con la fórmula
siendo xpac la coordenada x del punto (P) de referencia del piloto en un sistema de referencia que tiene su origen en el punto fijo del avión simulado y siendo zpac la coordenada z del punto de referencia del piloto en dicho sistema de referencia, siendo
- un filtro de paso alto y un filtro de paso bajo para filtrar la primera componente (Ay),
- dos juegos de un primer y un segundo filtros complementarios, siendo filtros complementarios aquellos cuya suma de funciones de transferencia es uno, para filtrar cada uno de los términos de la segunda componente en paralelo,
- un combinador para combinar la salida del filtro de paso alto y las salidas del primero de los filtros complementarios de cada juego, para calcular la posición lateral (y) deseada del simulador, y un combinador para combinar la salida del filtro de paso bajo y las salidas del segundo de los filtros complementarios de cada juego para calcular el ángulo de alabeo (
12. Un simulador de vuelo adaptado para realizar movimientos controlados, que implica las aceleraciones lineales y angulares percibidas por un piloto sentado en el asiento para el piloto,
con lo que la velocidad de alabeo (p) y la velocidad de guiñada (r), así como una fuerza específica en una dirección lateral (Ay), calculadas de acuerdo con un modelo de un avión simulado en un punto fijo del avión simulado, son convertidas por un programa de movimiento en una posición lateral (y) y un ángulo de alabeo (
en que el simulador de vuelo comprende cualquiera de:
una primera calculadora adaptada para calcular el ángulo de alabeo (
y/o
- una segunda calculadora adaptada para descomponer la fuerza específica en la dirección lateral (Aypilot) que actúa en el punto de referencia del piloto en el avión simulado, en una primera componente y una segunda componente, relacionada la primera componente con la fuerza específica (Ay) en un punto fijo del avión simulado, y teniendo la segunda componente un primer término relacionado con las aceleraciones debidas a la aceleración de guiñada (r) y un segundo término relacionado con las aceleraciones angulares de alabeo (p), de acuerdo con la fórmula
siendo xpac la coordenada x del punto (P) de referencia del piloto en un sistema de referencia que tiene su origen en el punto fijo del avión simulado, y siendo zpac la coordenada z del punto de referencia del piloto en dicho sistema de referencia, siendo
- un filtro de paso alto y un filtro de paso bajo para filtrar la primera componente (Ay),
- dos juegos de un primer y un segundo filtros complementarios, siendo filtros complementarios aquellos filtros cuya suma de funciones de transferencia es uno, para filtrar cada uno de los términos de la segunda componente en paralelo,
- un combinador para combinar la salida del filtro de paso alto y las salidas del primero de los filtros complementarios de cada juego, para calcular la posición lateral (y) deseada del simulador, y un combinador para combinar la salida del filtro de paso bajo y las salidas del segundo de los filtros complementarios de cada juego para calcular el ángulo de alabeo (
Patentes similares o relacionadas:
SIMULADOR DE VUELO ROBÓTICO TÁCTICO Y ACROBÁTICO, del 11 de Junio de 2020, de INDUSTRIAL ROBOTICS SOLUTIONS MEXICO SA DE CV: La presente invención se refiere a un sistema de simulador integral de vuelo que incluye un brazo robótico industrial que cuenta con seis ejes y un séptimo […]
Sistemas y métodos para simulación de cardán, del 3 de Junio de 2020, de SZ DJI Technology Co., Ltd: Método de simulación de control de cardán, comprendiendo dicho método: recibir una señal de modo de cardán indicativa de una selección […]
Dispositivo de ensayo, del 26 de Febrero de 2020, de Saginomiya Seisakusho, Inc: Dispositivo de ensayo, en el que se aplica potencia externa a la construcción que va a someterse a ensayo (E) y se realizan diversos ensayos, comprendiendo […]
APARATO Y MÉTODO PARA LA GENERACIÓN DE MICROGRAVEDAD, del 24 de Octubre de 2019, de INGESEA AUTOMATION SL: Un aparato para la generación de microgravedad, que comprende: un primer cuerpo giratorio para girar alrededor de un primer eje (12a), accionado […]
Dispositivo de vibración y sistema de vibración para un simulador que los incluye, del 14 de Agosto de 2019, de Kabushiki Kaisha Saginomiya Seisakusho: Un dispositivo de vibración, que comprende: un accionador (38A) que tiene un pistón que tiene un extremo fijo conectado en un extremo […]
SIMULADOR COMPACTO DE MOVIMIENTO, del 11 de Abril de 2019, de GONZÁLEZ MARTÍN, Francisco José: La presente invención se encuadra en el campo técnico de los simuladores para la enseñanza o el entrenamiento, más concretamente en el de aquellos […]
Dispositivo accionador hexápodo, del 17 de Octubre de 2018, de THALES: Dispositivo accionador hexápodo que descansa sobre un soporte sustancialmente plano, que comprende: - seis patas (21, 22, 23, 24, […]
Aparato de control de movimiento, del 14 de Marzo de 2018, de WILLIAMS GRAND PRIX ENGINEERING LIMITED: Un simulador de movimiento que comprende una estructura de soporte de alojamiento de ocupante, un primer aparato de control de movimiento, un segundo […]